Download to read offline

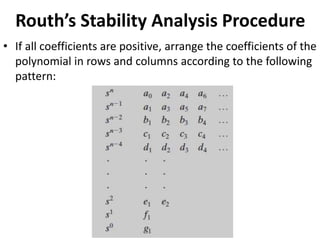
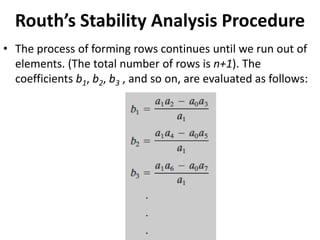
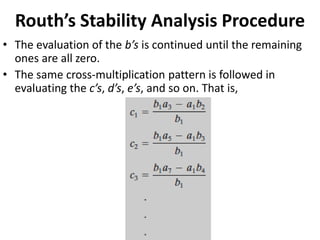
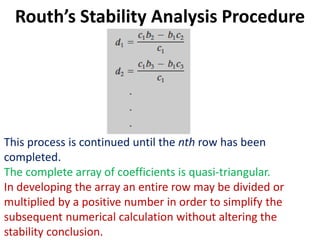
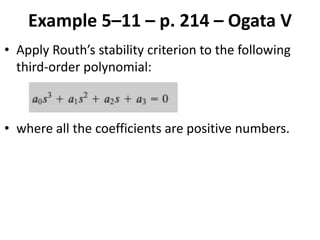
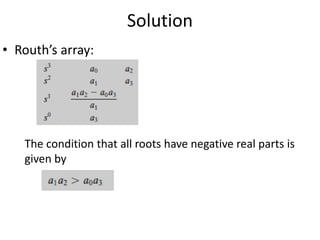
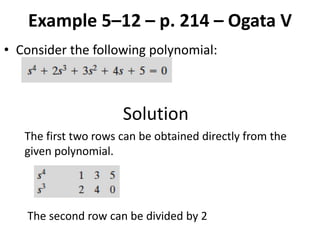
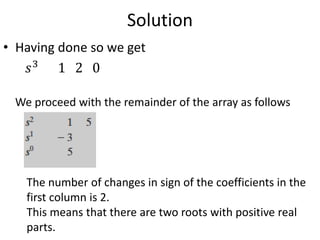
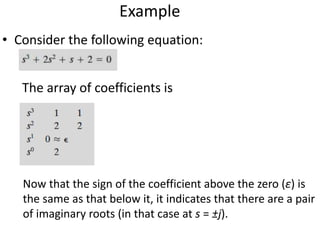

This document discusses stability analysis in the frequency domain using Routh's stability criterion. It defines absolute and relative stability and explains that Routh's criterion determines stability by analyzing the signs of coefficients in the characteristic equation's Routh array. The document provides examples of applying Routh's criterion to determine stability and calculating the range of a parameter value for stability. It also covers special cases and using the criterion to analyze relative stability by shifting the s-plane.

































![Roth_herwitz_stability_criterion-[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/rothherwitzstabilitycriterion1-251026051926-6a7e967e-thumbnail.jpg?width=640&height=640&fit=bounds)





















































