Download as POTX, PPTX








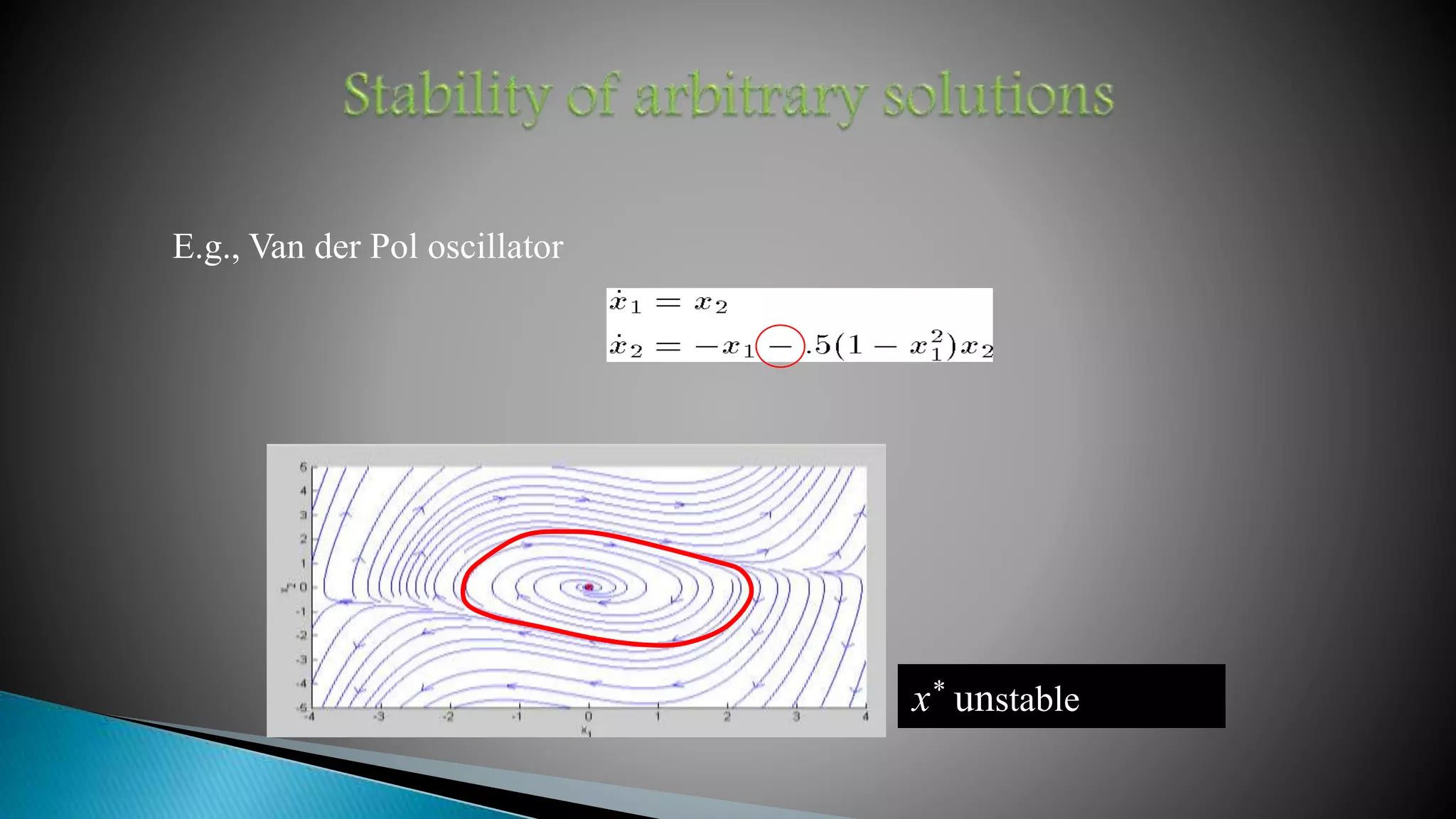
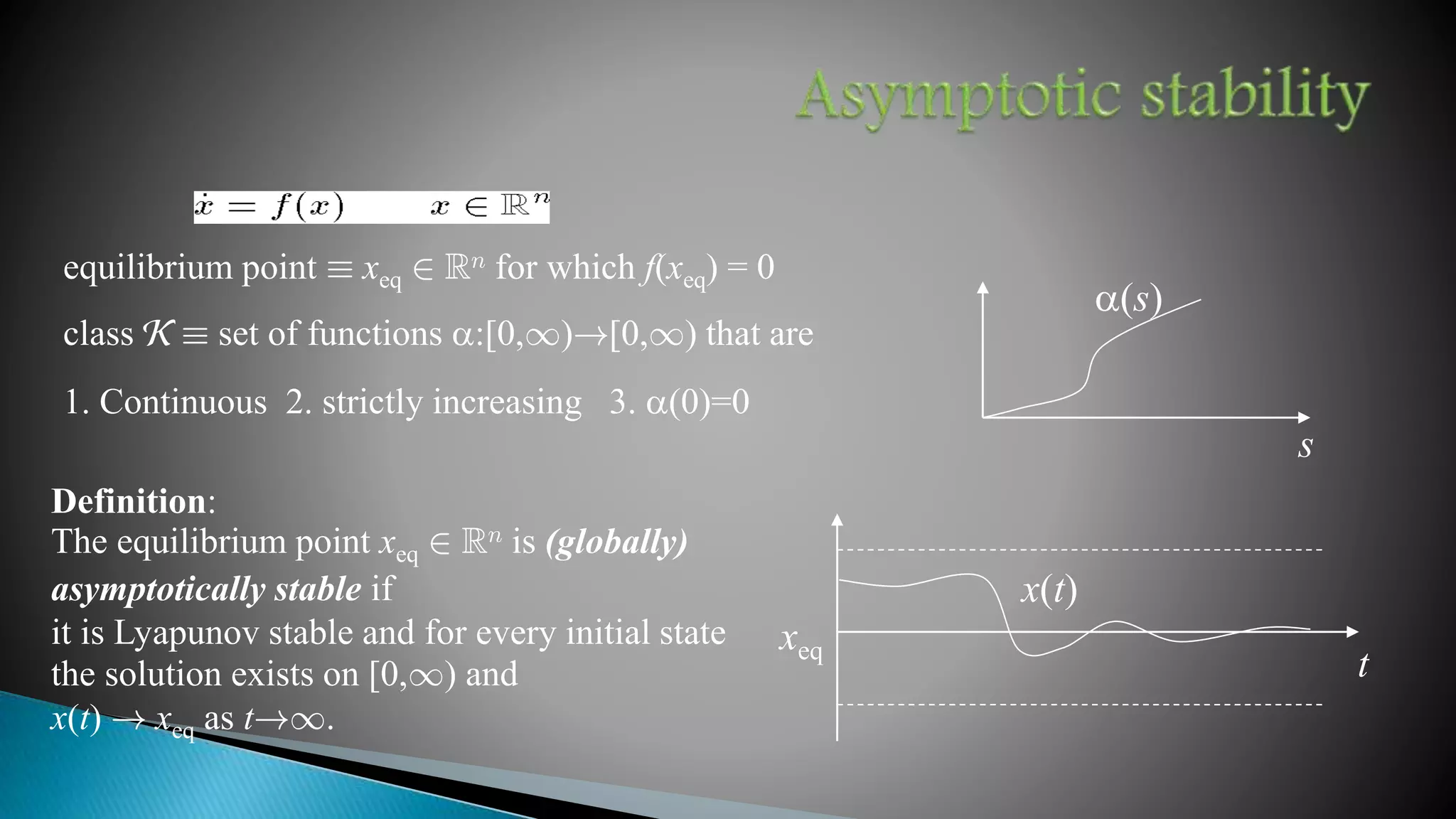



Lyapunov stability is named after Aleksandr Lyapunov and considers stability in nonlinear systems. There are two main definitions of Lyapunov stability: 1) an equilibrium point is stable if solutions starting near it remain near it, and 2) an equilibrium point is stable if the operator mapping initial to solution values is continuous at that point. Asymptotic stability further requires that solutions converge over time. Lyapunov sought conditions ensuring stability rather than just boundedness or convergence alone.




































![Lyapunov Stability Rizki Adi Nugroho [1410501075]](https://cdn.slidesharecdn.com/ss_thumbnails/lyapunovstability-rizkiadinugroho1410501075-161123102745-thumbnail.jpg?width=640&height=640&fit=bounds)








































