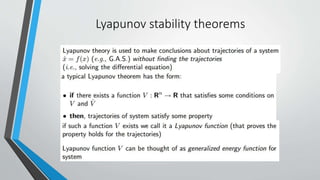
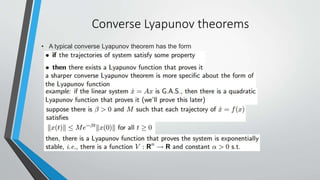
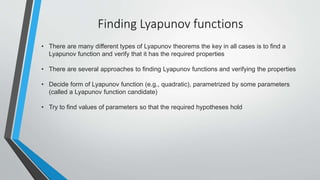
This document discusses Lyapunov theory for analyzing the stability of nonlinear systems. It introduces concepts like Lyapunov stability, positive definite functions, and Lyapunov stability theorems. The document notes that Lyapunov stability theorems relate the existence of a Lyapunov function to the stability of solutions or trajectories of a system. It states that finding Lyapunov functions typically involves choosing a functional form and determining parameter values such that the required properties are satisfied.





































![Lyapunov Stability Rizki Adi Nugroho [1410501075]](https://cdn.slidesharecdn.com/ss_thumbnails/lyapunovstability-rizkiadinugroho1410501075-161123102745-thumbnail.jpg?width=640&height=640&fit=bounds)