Downloaded 130 times
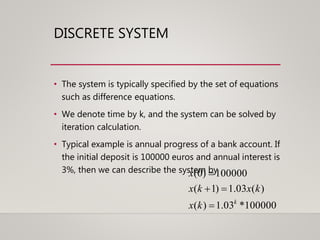
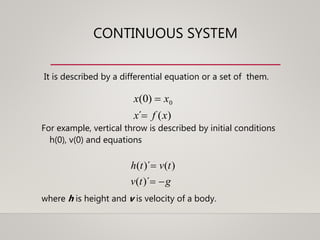
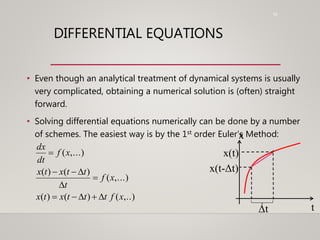
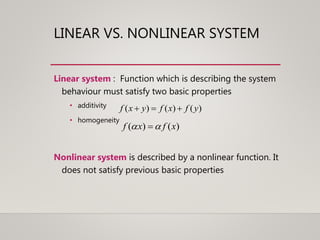
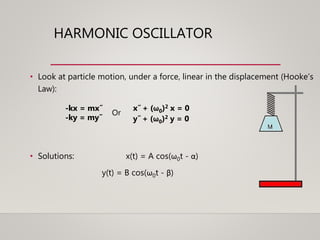


This document discusses dynamical systems. It defines a dynamical system as a system that changes over time according to fixed rules determining how its state changes from one time to the next. It then covers: - The two parts of a dynamical system: state space and function determining next state. - Classification of systems as deterministic/stochastic, discrete/continuous, linear/nonlinear, and autonomous/nonautonomous. - Examples of discrete and continuous models, differential equations, and linear vs nonlinear systems. - Terminology including phase space, phase curve, phase portrait, and attractors. - Analysis methods including fixed points, stability, and perturbation analysis. - Examples of harmonic oscillator,






















































































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)