Download to read offline
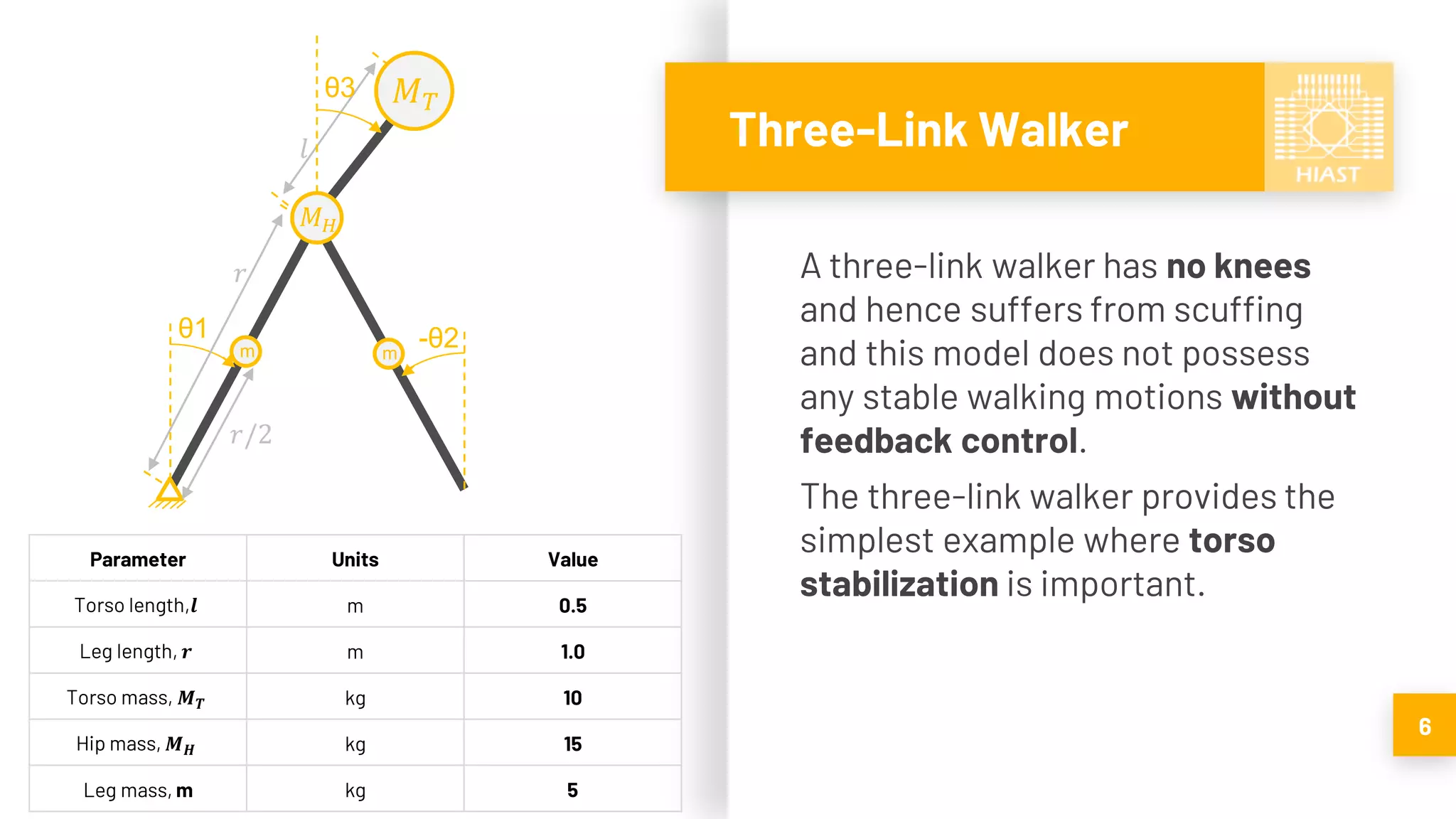
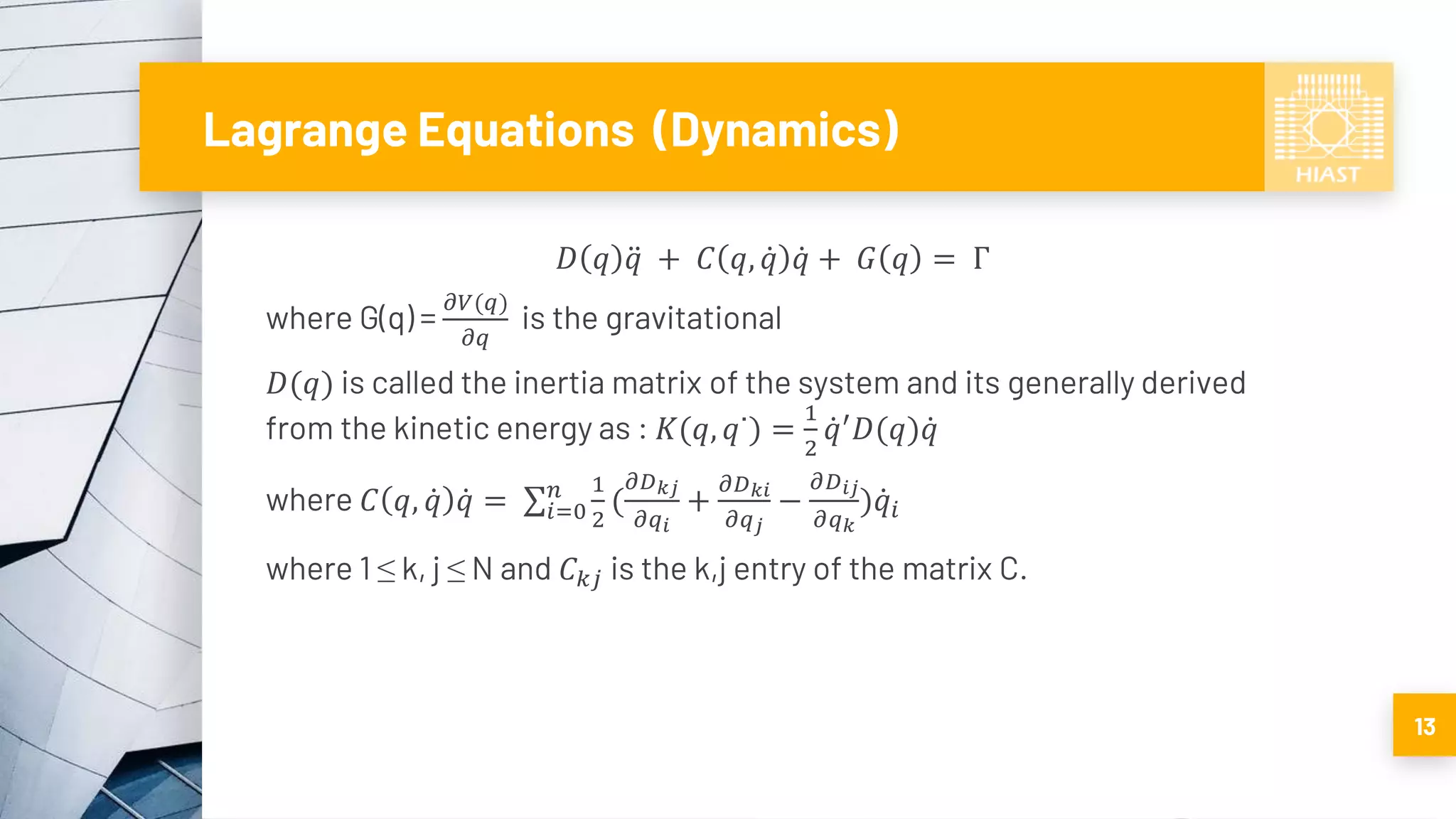
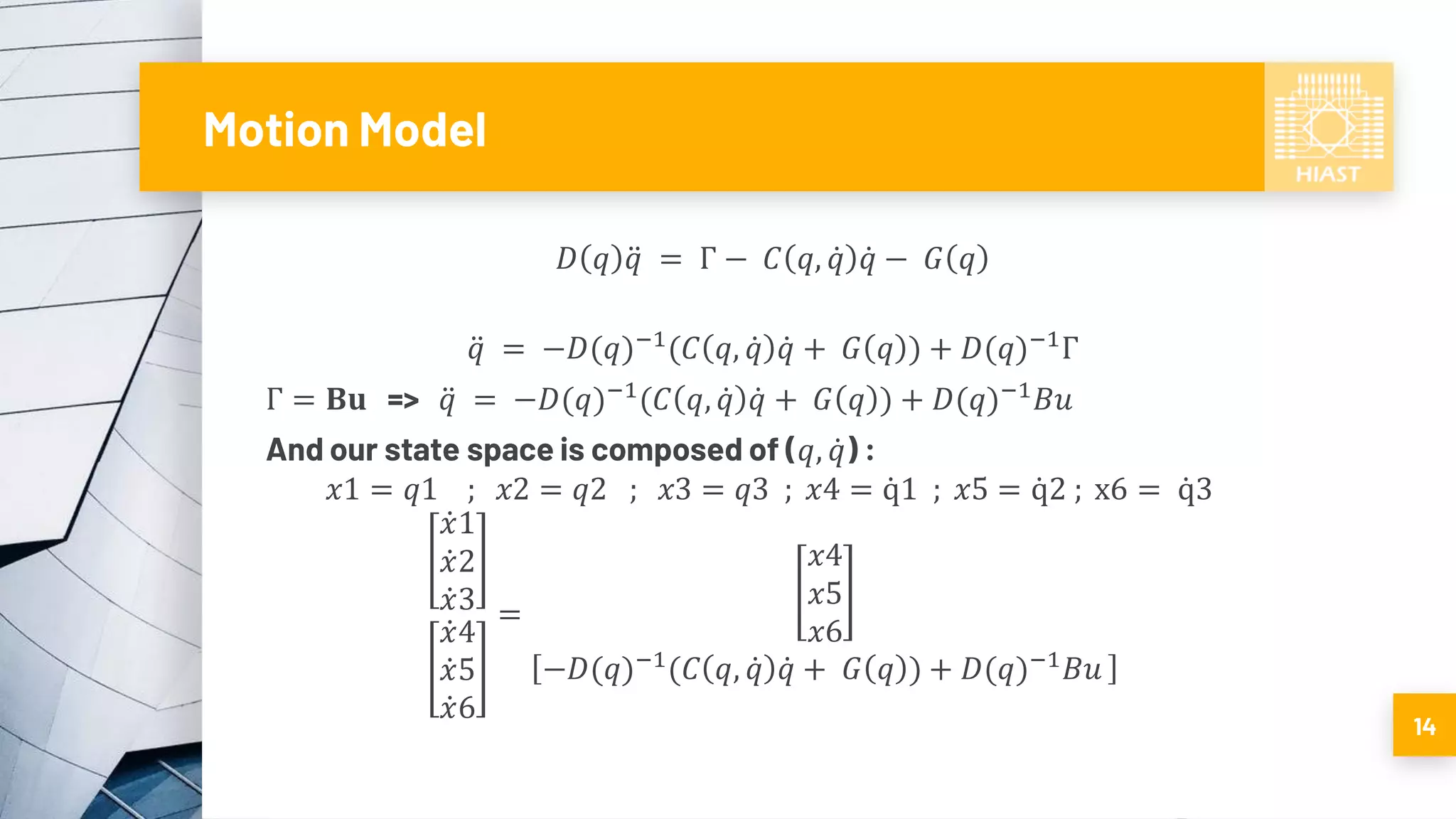
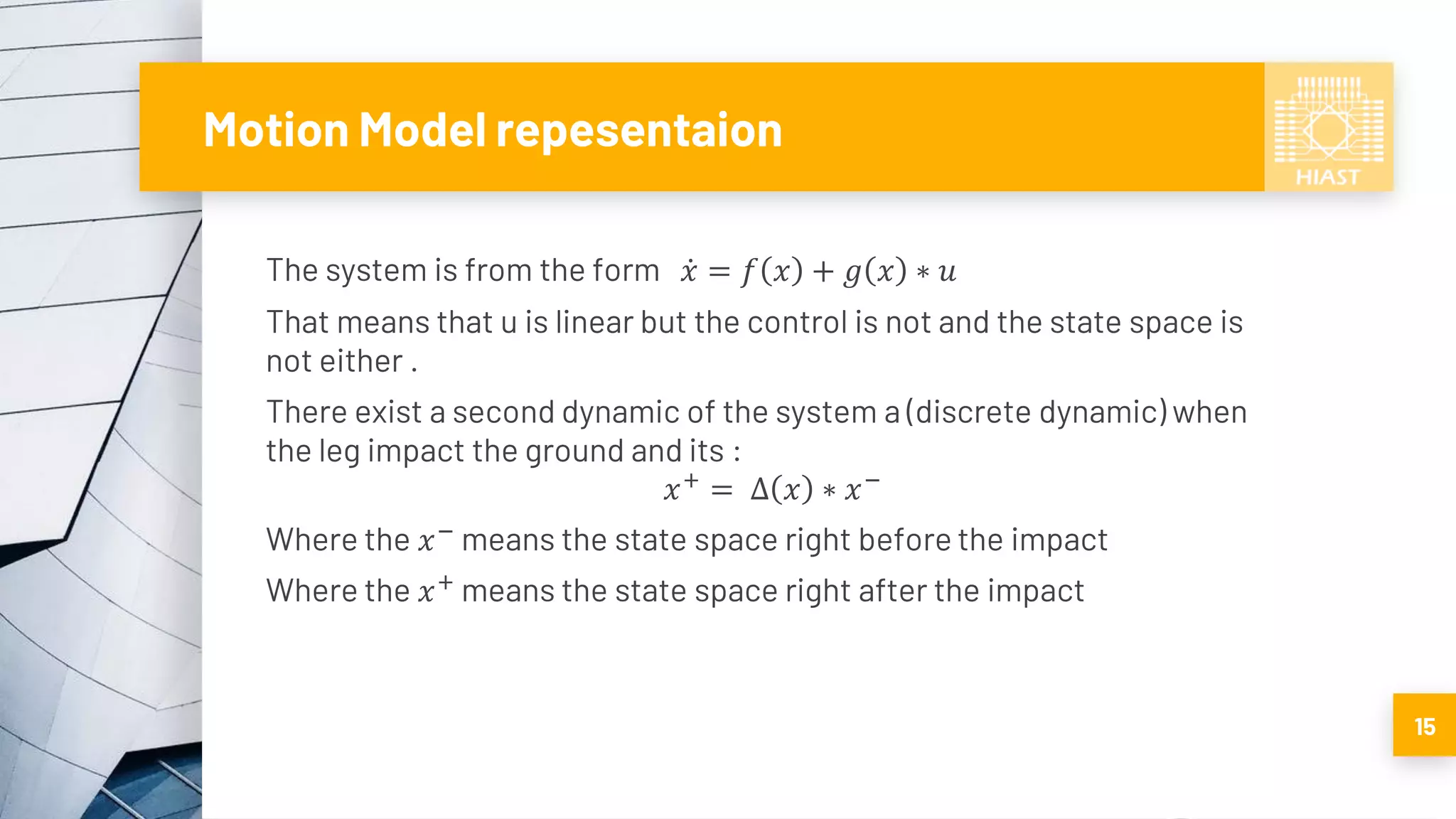
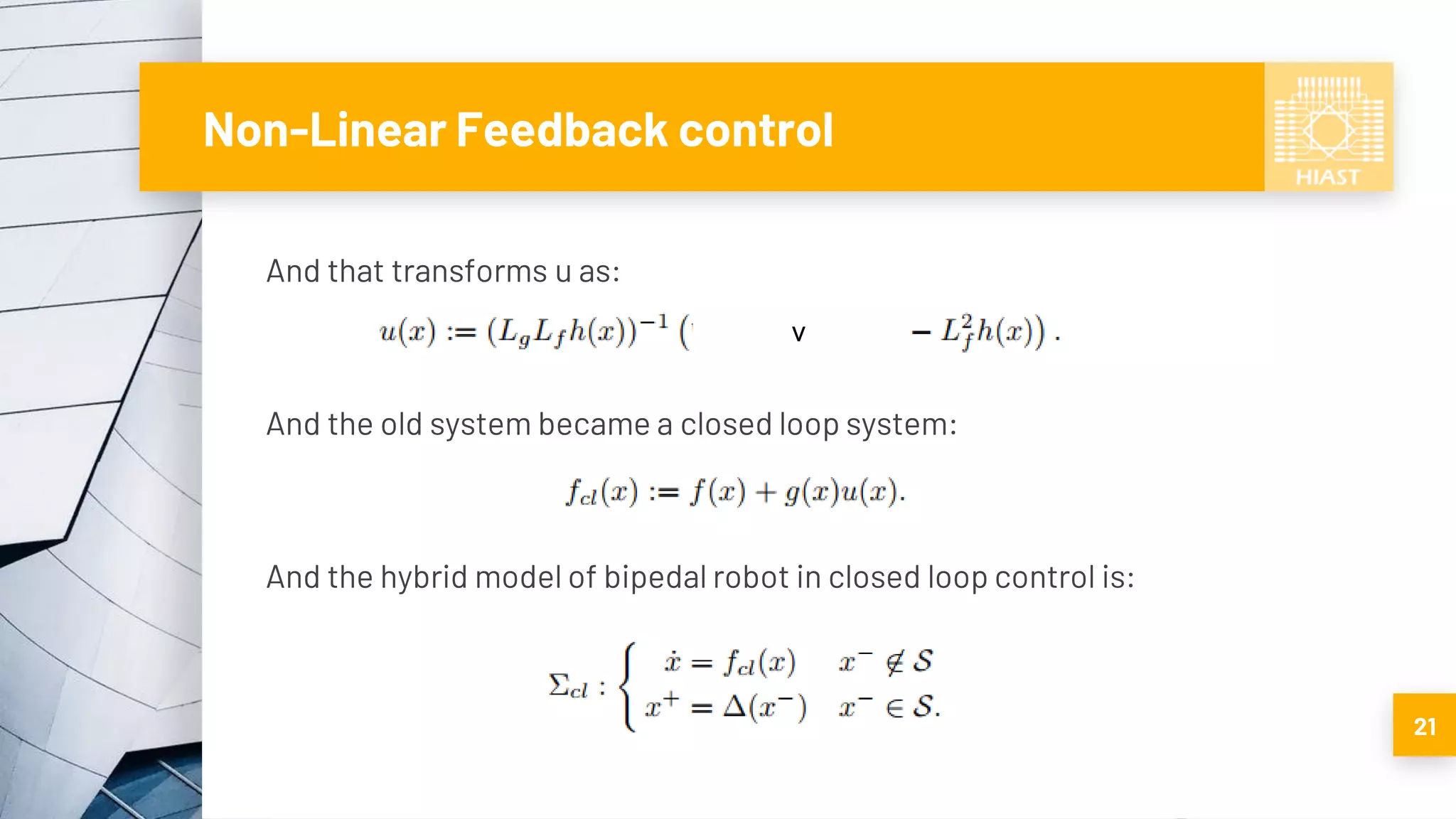
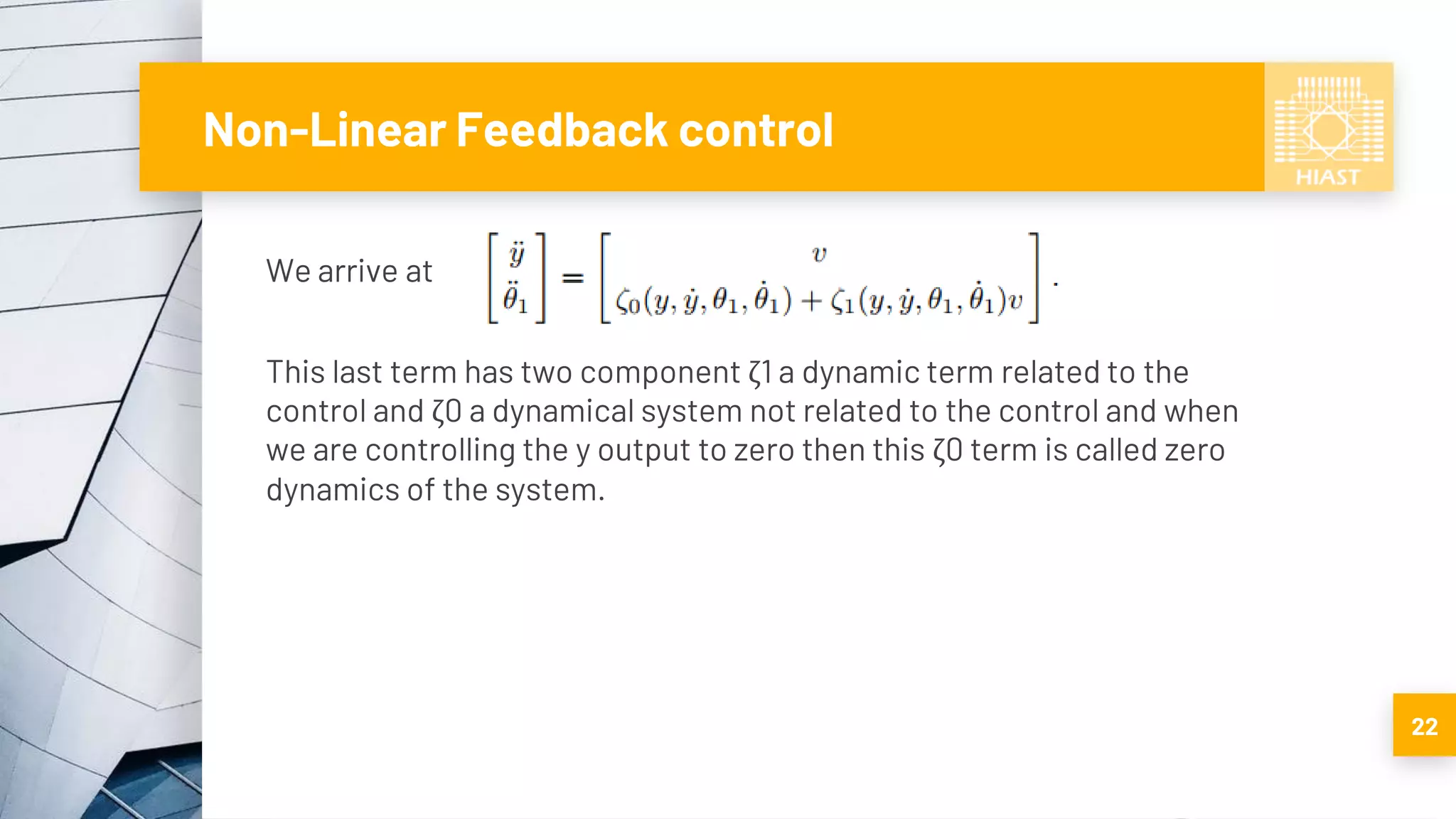

The document discusses the principles of non-linear control theory with a focus on controlling a three-link bipedal robot. Key topics include feedback linearization, Lagrangian dynamics, and the challenges of achieving stable walking motions. Results indicate that while the non-linear feedback controller can manage the robot's movements to some extent, direct control of the under-actuated system presents difficulties due to infinite amplitude errors in the motion model.




















![Av 738- Adaptive Filtering - Wiener Filters[wk 3]](https://cdn.slidesharecdn.com/ss_thumbnails/av-738-aft-spr18-lecture03-optimumfilters-weinerwk3-180215235757-thumbnail.jpg?width=640&height=640&fit=bounds)





























![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)













![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

