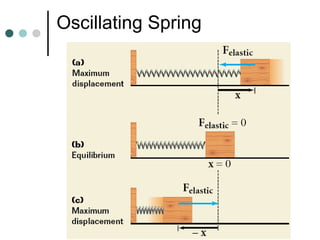
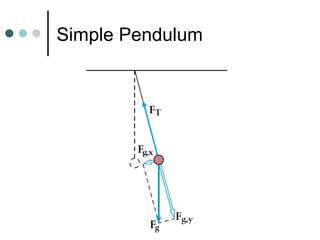
This document discusses simple harmonic motion and compares oscillating springs and pendulums. It defines simple harmonic motion as vibration about an equilibrium position where a restoring force is proportional to displacement. Springs and pendulums are given as examples that exhibit simple harmonic motion. The restoring force of a spring is described by Hooke's law as being proportional to displacement. For both springs and pendulums, the period of oscillation depends only on intrinsic properties and is independent of amplitude.