The document discusses forward and inverse kinematics calculations for a planar robot. It provides the dimensions of a 2-link robot and uses MATLAB code to calculate the end effector position and orientation given joint angles. It also presents the concept of inverse kinematics using symbolic math and an example inverse kinematics calculation for a PUMA 560 robot.
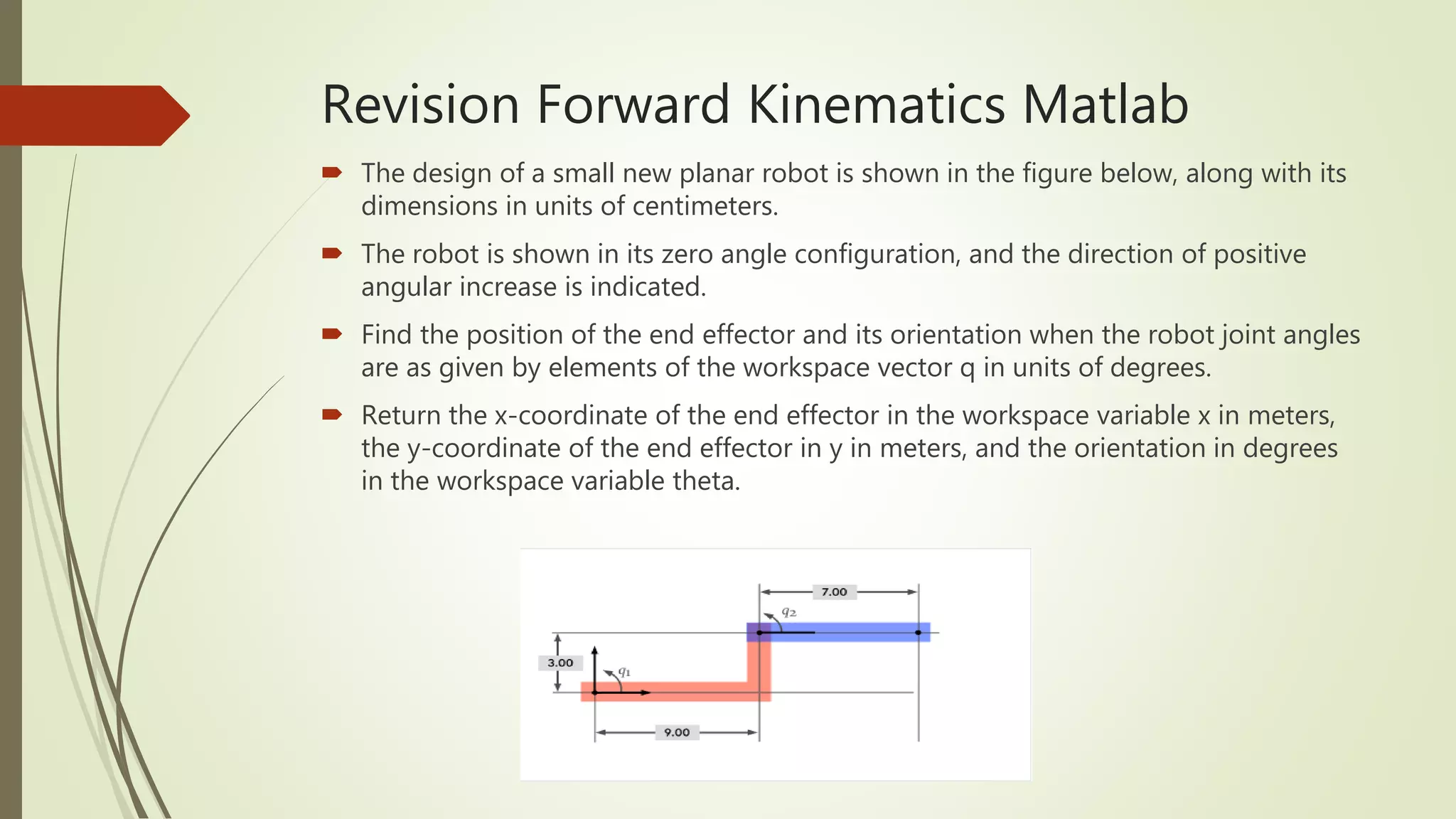
![Revision Forward Kinematics Matlab
% DO NOT MODIFY THE FOLLOWING LINES
q = [30 -20];
% Find the pose of the end-effector and store in the variable T.
T = trot2(30,'deg')*transl2(9,3)*trot2(-20,'deg')*transl2(7,0);
% Find the x-coordinate in metres and store in the variable x.
a=T;
x = a(1,3)/100;
% Find the y-coordinate in metres and store in the variable y.
y =a(2,3)/100;
% Find the orientation angle by examining elements of the % rotation submatrix,
element (1,1) which is equal to cos(theta).
% Store in the variable theta.
theta = acosd(a(1,1))](https://image.slidesharecdn.com/roboticslecture3-170214212059/75/Robotics-lecture-3-3-2048.jpg)
![Matlab code
syms a1 a2 a3 a4 q1 q2 q3 q4
trchain('Rz(q1)Tz(a1)Ry(q2)Tz(a2)Ry(q3)Tz(a3)Ry(q4)Tz(a4)',[q1 q2 q3 q4])
mdl_puma560
T = transl(0.6, 0.1, 0) * rpy2tr(0, 180, 0, 'deg')
q = p560.ikine6s(T)](https://image.slidesharecdn.com/roboticslecture3-170214212059/75/Robotics-lecture-3-14-2048.jpg)