1) The document discusses physical system modelling and modelling of mechanical systems. It defines a physical system and classifies systems as static or dynamic.
2) For dynamic systems, it describes representing them mathematically using differential equations and introduces modelling basic mechanical elements like mass, springs and dampers.
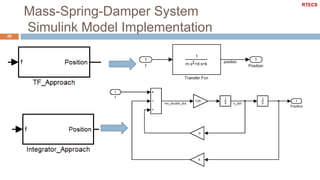
3) An example is given of modelling a mass-spring-damper system using both an integrator approach and transfer function approach. The simulink model of the system is also demonstrated.
4) Vehicle suspension systems are described as an example of modelling a real mechanical system, with the quarter-car model introduced.

















![MATLAB Representations of Transfer Functions
39
num=[b1,b2,. . .,bm,bm+1];
den=[1,a1,a2,. . .,an−1, an];
G=tf(num,den)
Example
s4
2s3
3s2
4s 5
s 5
G(s)
RTECS](https://image.slidesharecdn.com/02physical-191114162204/85/02-physical-system-modelling-mechanical-systems-19-320.jpg)

![Zero-Pole-Gain Representation In MATLAB
41
z=-[z1; z2; · · · ; zm];
p=-[p1; p2; · · · ; pn];
G=zpk(z,p,K)
Example
s 3
(s 2)(s 4)(s 5)
pzmap
Plots the pole-zero map of the LTI model sys
RTECS](https://image.slidesharecdn.com/02physical-191114162204/85/02-physical-system-modelling-mechanical-systems-21-320.jpg)















![Spring
Energy-storage Element - Potential Energy
10
An elastic element extends in proportion to the force (or torque)
applied to it.
For the translational spring
F k(x x0 ) ; k[N / m]:springstiffness
For the rotational spring
T k( 0 ) ; k[Nm / rad]:springstiffness
RTECS](https://image.slidesharecdn.com/02physical-191114162204/85/02-physical-system-modelling-mechanical-systems-37-320.jpg)
![Viscous Damper
Energy-dissipative Element11
A damping element produces a velocity in proportion tothe
force (or torque) applied to it.
For the translational damper
F dx; d [Ns / m]:damping coefficient
For the rotational damper
T d; d[Nms / rad]:damping coefficient
d
RTECS](https://image.slidesharecdn.com/02physical-191114162204/85/02-physical-system-modelling-mechanical-systems-38-320.jpg)






![Mass-Spring-Damper System
Transfer Function in Matlab18
s = tf('s');
sys = 1/(m*s^2+d*s+k)
Note that we have used the symbolic s variable here to define our
transfer function model.
Alternatively
num = [1];
den = [m b k];
sys = tf(num,den)
RTECS](https://image.slidesharecdn.com/02physical-191114162204/85/02-physical-system-modelling-mechanical-systems-45-320.jpg)