Downloaded 25 times


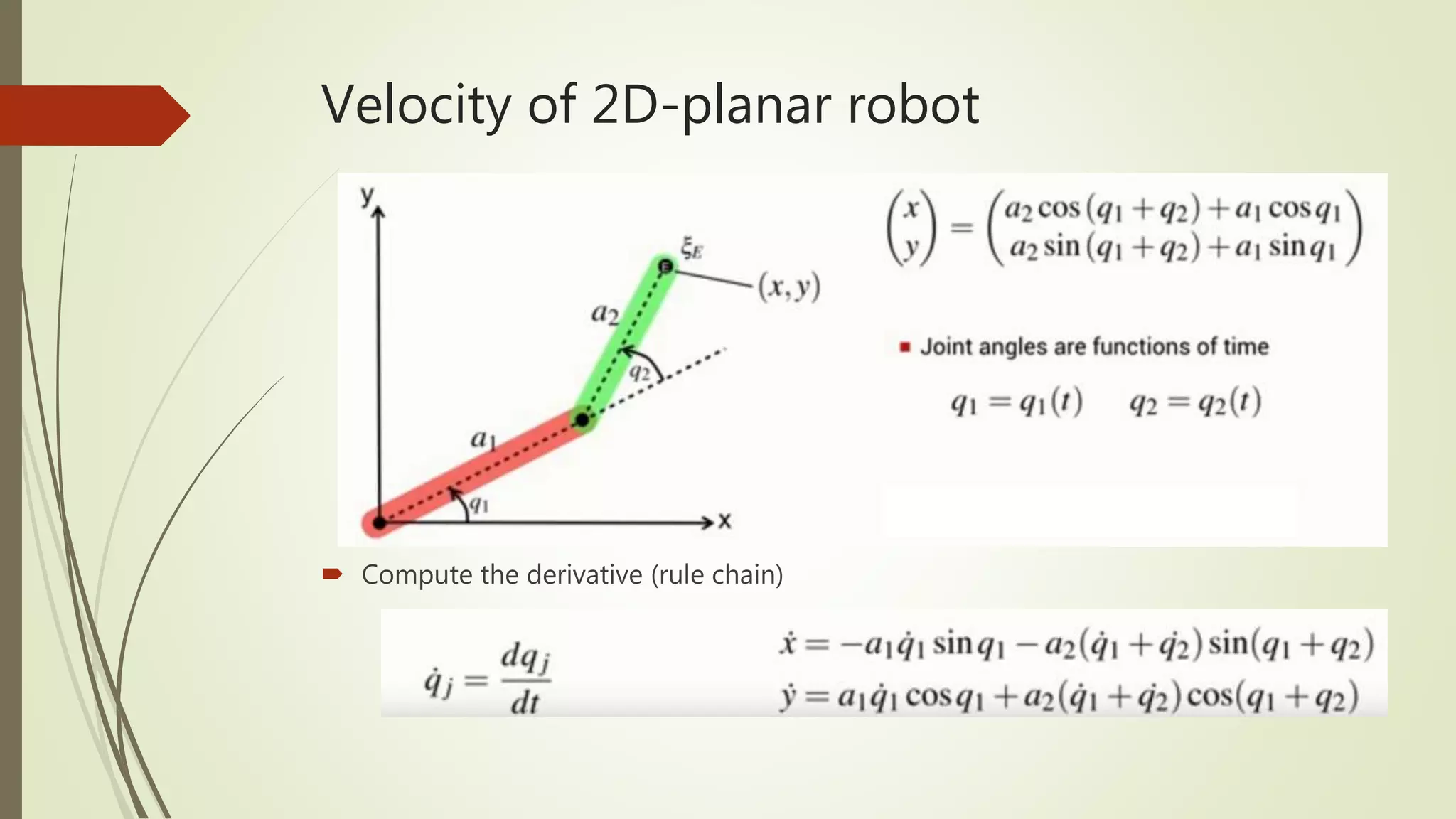
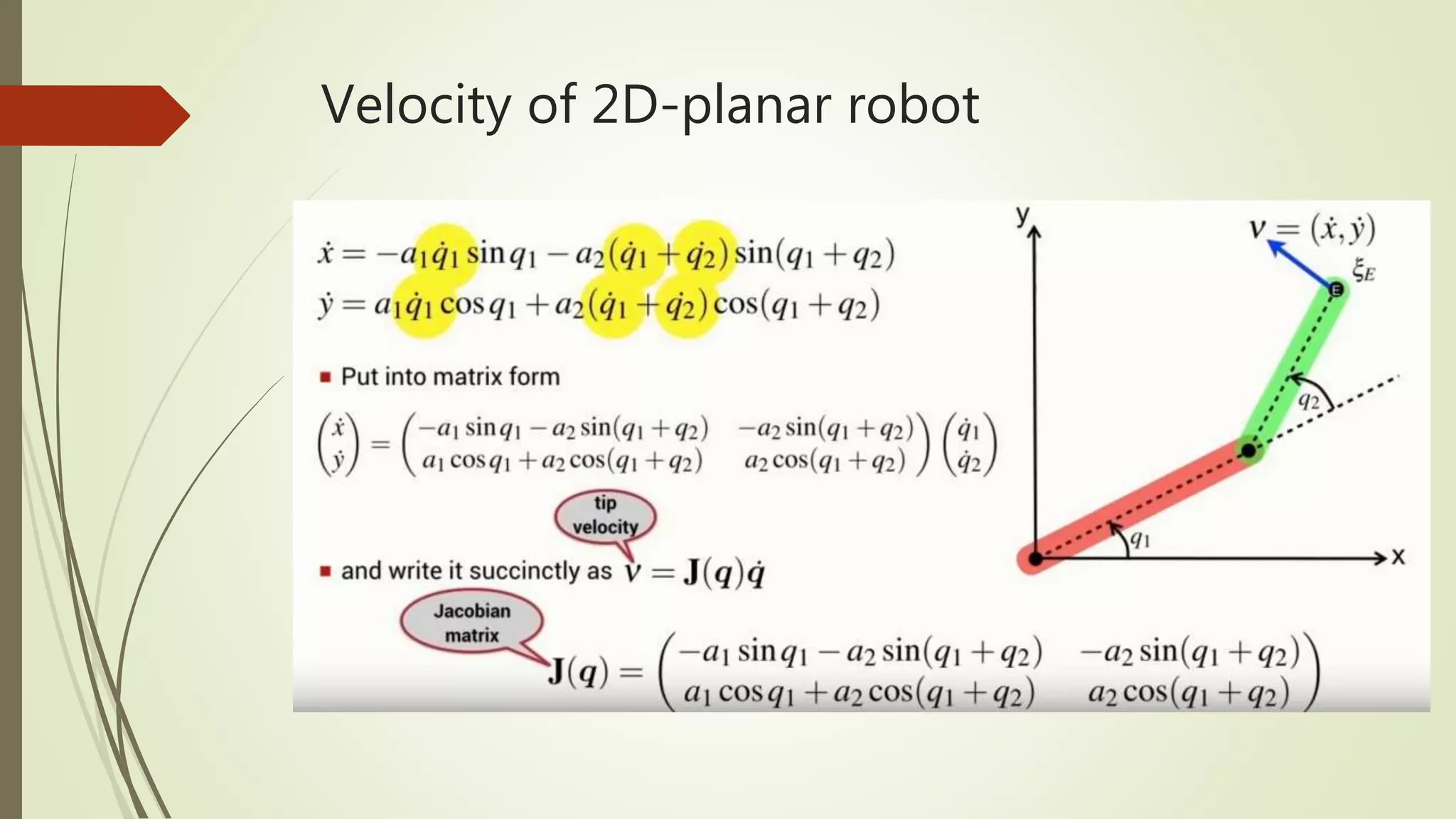
![Velocity of 2D-planar robot
Matlab code to get Jacobin matrix
mdl_planar2_sym
Syms q1 q2;
T=p2.fkine(q1,q2);
P=p2(1:2,4);
J = jacobian(p, [q1 q2])](https://image.slidesharecdn.com/velocitykinematics-190807141836/75/Velocity-kinematics-5-2048.jpg)






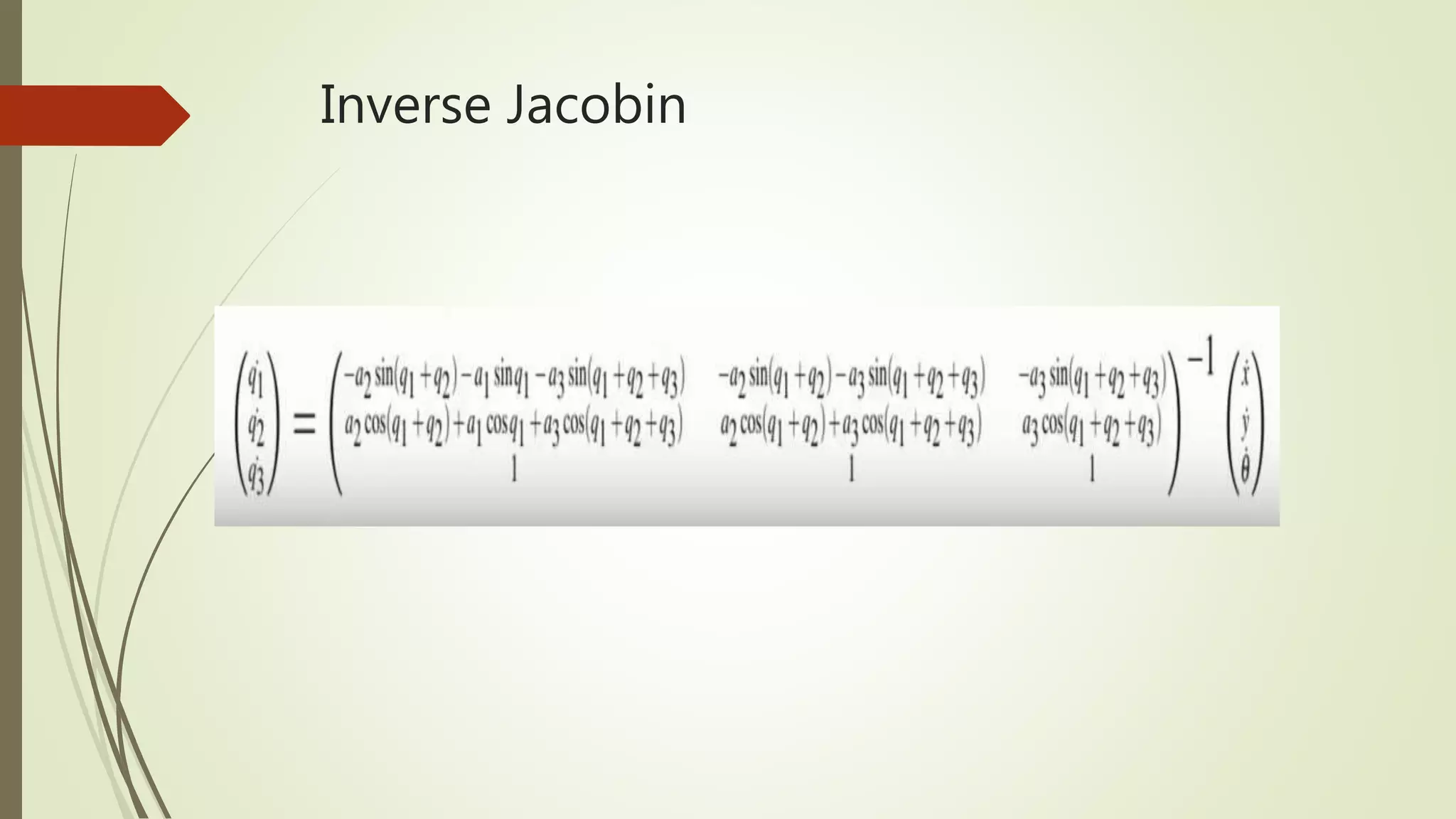
This document discusses kinematics and velocity concepts for 2D planar robots. It covers computing the derivative to determine velocity, using Matlab code to calculate the Jacobin matrix, inverting the Jacobin, issues with singularities, forward and inverse kinematics for a 3 link planar robot arm, and calculating the inverse Jacobin.