The document describes a 3 link robotic manipulator with revolute and prismatic joints. It provides the dimensions and D-H parameters of the robot, develops the forward kinematics equations relating the joint angles to the end effector pose, calculates the inverse kinematics, and determines the Jacobian and potential singularities. It also derives expressions for the angular and linear velocities of the end effector as well as the forces and torques throughout the robot.
![3
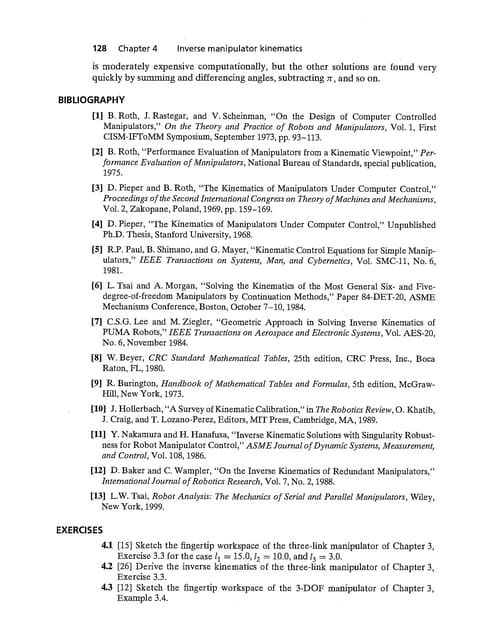
Table 1: D-H Parameter Table for all frames of the robot
i αi - 1 ai - 1 di - 1 θi
1 0 0 L1 θ1 + 135°
2 L2 90° d2 0
3 0 0 0 θ3
E 0 -90° LE 0
MatLab Script
%Solutions
clear all
close all
%Robot Dimensions
L_1 = 1; %meters
L_2 = 0.5*sind(45); %meters
L_E = 0.5; %meters
syms ai alphai di thetai theta1 d_2 theta3
T_x=[1 0 0 0;0 cos(alphai) -sin(alphai) 0;0 sin(alphai) cos(alphai) 0;0 0 0
1];
D_x=[1 0 0 ai;0 1 0 0;0 0 1 0;0 0 0 1];
T_z=[cos(thetai) -sin(thetai) 0 0;sin(thetai) cos(thetai) 0 0;0 0 1 0 ;0 0 0
1];
D_z=[1 0 0 0;0 1 0 0;0 0 1 di;0 0 0 1];
%Link the reference frames into one homogeneous transform matrix
AtB=T_x*D_x*T_z*D_z;
%Transformation from frame 0 to frame 1
ai = 0;
alphai = 0;
di = L1;
thetai = theta1 + 3*pi/4;
T_01 = subs(AtB);
iT_01 = inv(T_01);
%Transformation from frame 1 to frame 2
ai = L_2;
alphai = pi/2;
di = d_2;
thetai = 0;
T_12 = subs(AtB);
%iT_12 = inv(T_12);
%Transformation from frame 2 to frame 3
ai = 0;](https://image.slidesharecdn.com/5300475b-f48d-4a69-9337-ee9065a8e3c6-161215234928/75/Robotic-Manipulator-with-Revolute-and-Prismatic-Joints-3-2048.jpg)
![4
alphai = 0;
di = 0;
thetai = theta3;
T_23 = subs(AtB);
%Transformation from frame 3 to frame E
ai = 0;
alphai = -pi/2;
di = LE;
thetai = 0;
T3E = subs(AtB);
%iT3E = inv(T3E);
% Linking the Transformations
T_02 = T_01*T_12;
T_03 = T_01*T_12*T_23;
T_0E = T_01*T_12*T_23*T_3E;
T_1E = T_12*T_23*T_3E;
T_2E = T_23*T_3E;
x = T_0E(1,4);
y = T_0E(2,4);
z = T_0E(3,4);
%Inverse Kinematics for robot
syms px py pz
theta3 = solve( pz == z, theta3);
[d_2, theta1] = solve(px == x, py == y, d_2, theta1);
%Rotation Matrices frame to frame
R_01 = T_01(1:3,1:3);
R_12 = T_12(1:3,1:3);
R_23 = T_23(1:3,1:3);
R_3E = T_3E(1:3,1:3);
R_02 = R_01*R_12;
R_03 = R_01*R_12*R_23;
R_0E = R_01*R_12*R_23*R_3E;
%Forces 10,5,and 1
f_EE = [10;5;1];
f_33 = R_3E*f_EE;
f_22 = R_23*f_33;
f_11 = R_12*f_22;
f_00 = R_01*f_11;
%Vectors between D-H Origins
P_01 = T_01(1:3,4);
P_12 = T_12(1:3,4);
P_23 = T_23(1:3,4);
P_3E = T_3E(1:3,4);
P_00 = [0;0;0];
P_02 = T_02(1:3,4);
P_03 = T_03(1:3,4);
P_0E = T_0E(1:3,4);](https://image.slidesharecdn.com/5300475b-f48d-4a69-9337-ee9065a8e3c6-161215234928/75/Robotic-Manipulator-with-Revolute-and-Prismatic-Joints-4-2048.jpg)
![5
%Robot Torques
n_EE = zeros(3,1);
n_33 = R_01*n_EE + cross(P_3E,f_33);
n_22 = R_01*n_33 + cross(P_23,f_22);
n_11 = R_01*n_22 + cross(P_12,f_11);
n_00 = R_01*n_11 + cross(P_01,f_00);
t_0 = transpose(n_00)*[0;0;1];
t_1 = transpose(n_11)*[0;0;1];
t_2 = transpose(f_22)*[0;0;1];
t_3 = transpose(n_33)*[0;0;1];
t_E = zeros(3,1);
%Velocities
syms theta1Dot theta2Dot theta3Dot d_2Dot
%Unit Vectors
u_i = [1;0;0];
u_j = [0;1;0];
u_k = [0;0;1];
%Angular rotations
z_00 = u_k;
z_01 = R_01*u_k;
z_02 = R_02*u_k; %Prismatic
z_03 = R_03*u_k;
J_angular = [z00, 0*z01, z02];
Omega_0E = theta1Dot*u_k + 0 + theta3Dot*R_02*u_k + 0;
%Linear
J_linear = [cross(z_00,P_0E – P_00), z_02, cross(z_02,P_0E – P_02)];
%linear velocity equations
W_00 = zeros(3,1);
w_11 = inv(R_01)*w_00+[0;0;1]*theta1Dot;
w_22 = inv(R_12)*w_11+[0;0;0]*theta2Dot;
w_33 = inv(R_23)*w_22+[0;0;1]*theta3Dot;
w_EE = zeros(3,1);
v_00 = zeros(3,1);
v_11 = inv(R_01)*(v_00+cross(w_00,P_01));
v_22 = inv(R_12)*(v_11+cross(w_11,P_12))+d_2Dot*[0;0;1]; %Prismatic
v_33 = inv(R_23)*(v_22+cross(w_22,P_23));
v_EE = inv(R_3E)*(v_33+cross(w_33,P_3E));
v_0E = R_0E*v_EE;](https://image.slidesharecdn.com/5300475b-f48d-4a69-9337-ee9065a8e3c6-161215234928/75/Robotic-Manipulator-with-Revolute-and-Prismatic-Joints-5-2048.jpg)
![6
Frame Transformation Matrices
𝑇0
1
=
[
−sin (
𝜋
4
+ 𝜃1) −cos (
𝜋
4
+ 𝜃1) 0 0
cos (
𝜋
4
+ 𝜃1) − sin (
𝜋
4
+ 𝜃1) 0 0
0 0 1 1
0 0 0 1]
𝑇1
2
=
[
1 0 0
√2
4
0 0 −1 −𝑑2
0 1 0 0
0 0 0 1 ]
𝑇2
3
= [
cos(𝜃3) −sin(𝜃3) 0 0
sin(𝜃3) cos(𝜃3) 0 0
0 0 1 0
0 0 0 1
]
𝑇3
𝐸
=
[
1 0 0 0
0 0 1
1
2
0 0 1 0
0 0 0 1]
𝑇0
𝐸
=
[
− cos(𝜃3) ∗ sin(
𝜋
4
+ 𝜃1) −cos(
𝜋
4
+ 𝜃1) sin(𝜃3) ∗ sin (
𝜋
4
+ 𝜃1)
(sin(𝜃3) ∗ sin(
𝜋
4
+ 𝜃1))
2
+ 𝑑2 ∗ cos (
𝜋
4
+ 𝜃1) −
(√2 ∗ sin(
𝜋
4
+ 𝜃1))
4
cos(𝜃3) ∗ sin(
𝜋
4
+ 𝜃1) −𝑠𝑖𝑛(
𝜋
4
+ 𝜃1) − cos (
𝜋
4
+ 𝜃1) ∗ sin(𝜃3)
(√2 ∗ cos (
𝜋
4
+ 𝜃1))
4
−
(cos (
𝜋
4
+ 𝜃1) ∗ sin(𝜃3))
2
+ 𝑑2 ∗ sin(
𝜋
4
+ 𝜃1)
sin(𝜃3) 0 cos(𝜃3)
cos(𝜃3)
2
+ 1
0 0 0 1 ]](https://image.slidesharecdn.com/5300475b-f48d-4a69-9337-ee9065a8e3c6-161215234928/75/Robotic-Manipulator-with-Revolute-and-Prismatic-Joints-6-2048.jpg)
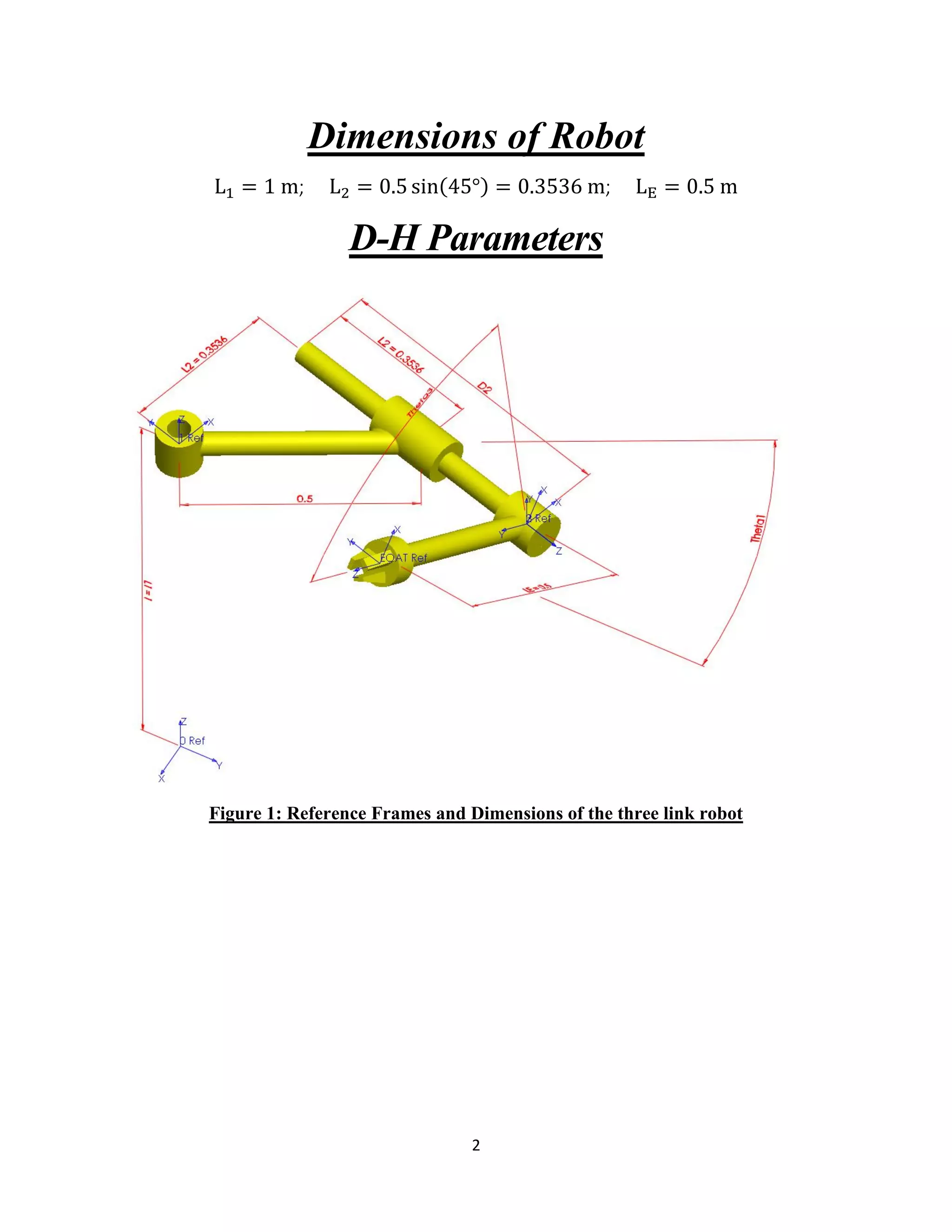
![8
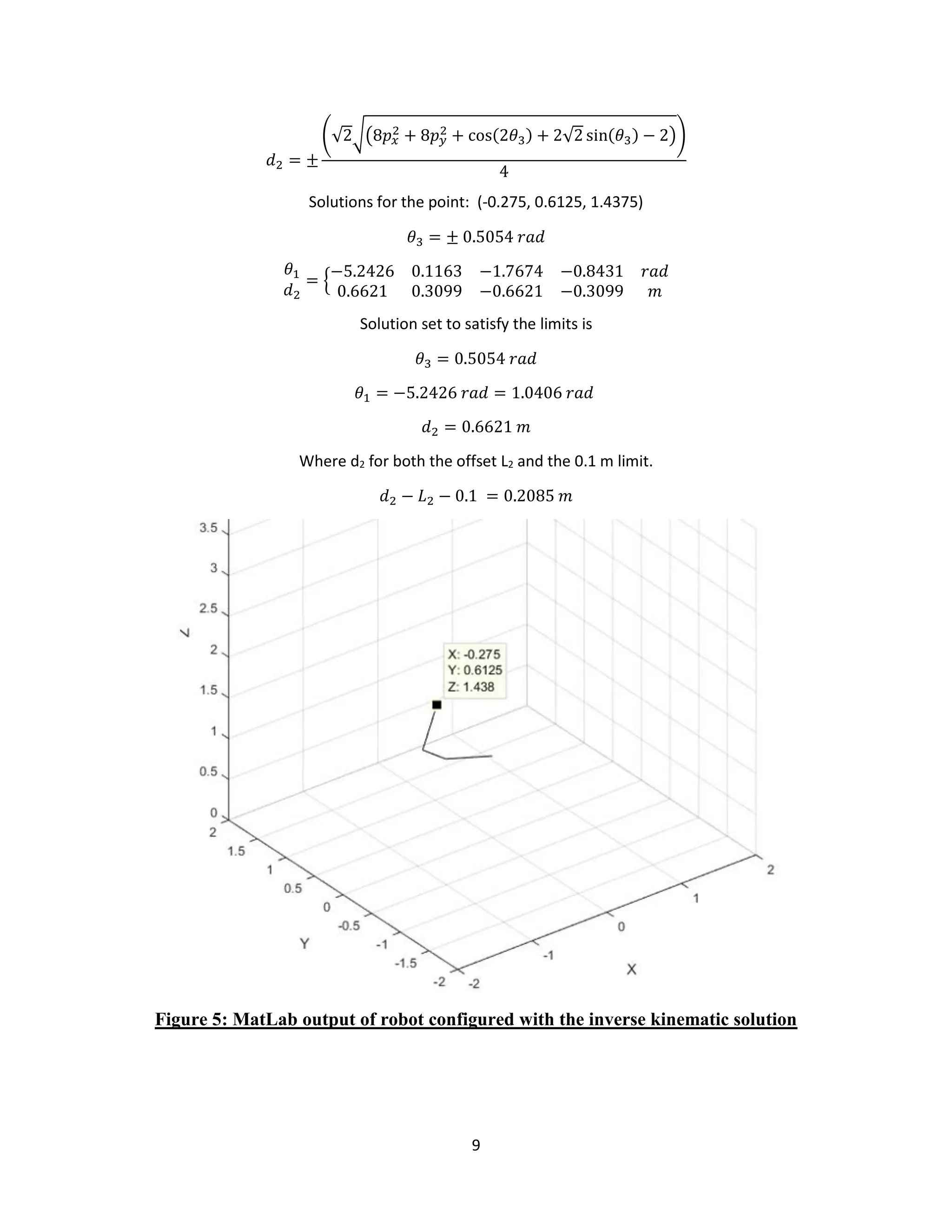
Figure 4: Trimetric view of reachable workspace
Inverse Kinematics for Manipulator
𝑇0
𝐸
= [
𝑟11 𝑟12 𝑟13 𝑝 𝑥
𝑟21 𝑟22 𝑟23 𝑝 𝑦
𝑟31 𝑟32 𝑟33 𝑝𝑧
0 0 0 1
]
𝑝𝑧 =
cos(𝜃3)
2
+1
𝑝 𝑦 =
(√2 𝑐𝑜𝑠 (
𝜋
4 + 𝜃1))
4
−
( 𝑐𝑜𝑠 (
𝜋
4 + 𝜃1) 𝑠𝑖𝑛(𝜃3))
2
+ 𝑑2 𝑠𝑖𝑛 (
𝜋
4
+ 𝜃1)
𝑝 𝑥 =
( 𝑠𝑖𝑛(𝜃3) 𝑠𝑖𝑛 (
𝜋
4 + 𝜃1))
2
−
(√2 𝑠𝑖𝑛 (
𝜋
4 + 𝜃1))
4
+ 𝑑2 𝑐𝑜𝑠 (
𝜋
4
+ 𝜃1)
Solving for θ3
𝜃3 = ± cos−1(2𝑝𝑧 − 2)
Substituting θ3 and solving for θ1 and d2
𝜃1 = 2 tan−1
(4𝑝 𝑦 ± √2√(8𝑝 𝑥
2 − 2√2 sin(𝜃3) + cos(2𝜃3) + 8𝑝 𝑦
2 − 2)) −
3𝜋
4](https://image.slidesharecdn.com/5300475b-f48d-4a69-9337-ee9065a8e3c6-161215234928/75/Robotic-Manipulator-with-Revolute-and-Prismatic-Joints-8-2048.jpg)
![10
Jacobian
[
cos (
𝜋
4
+ 𝜃1) ∗ sin(𝜃3)
2
−
√2 ∗ cos (
𝜋
4
+ 𝜃1)
4
− 𝑑2 ∗ sin (
𝜋
4
+ 𝜃1) cos (
𝜋
4
+ 𝜃1)
cos(𝜃3) ∗ sin (
𝜋
4
+ 𝜃1)
2
sin(𝜃3) ∗ sin (
𝜋
4 + 𝜃1)
2
−
√2 ∗ sin (
𝜋
4 + 𝜃1)
4
+ 𝑑2 ∗ cos (
𝜋
4
+ 𝜃1) sin(
𝜋
4
+ 𝜃1) −
cos(𝜃3) ∗ cos (
𝜋
4 + 𝜃1)
2
0 0
− sin(𝜃3)
2
0 0 − cos (
𝜃
4
+ 𝜃1)
0 0 sin (
𝜃
4
+ 𝜃1)
1 0 0 ]
𝐷𝑒𝑡(𝐽𝑙𝑖𝑛𝑒𝑎𝑟) =
𝑑2 ∗ sin(𝜃3)
2
𝐷𝑒𝑡(𝐽 𝑎𝑛𝑔𝑢𝑙𝑎𝑟) = 0
Singularities
When determinate of Jacobian = 0
The was no determinate for the angular Jacobian
There was no theta 1 that resulted in singularities
Given theta3 = 0 and pi
For d_2 < = 0.5(sin(45)) + 0.1
OR
d_2 > 0.5(sin(45)) + 0.5](https://image.slidesharecdn.com/5300475b-f48d-4a69-9337-ee9065a8e3c6-161215234928/75/Robotic-Manipulator-with-Revolute-and-Prismatic-Joints-10-2048.jpg)









![Digital Signals and System (October – 2016) [Revised Syllabus | Question Paper]](https://cdn.slidesharecdn.com/ss_thumbnails/dss-rs-qp-october-2016-180428083748-thumbnail.jpg?width=640&height=640&fit=bounds)






![Digital Signals and System (May – 2016) [Revised Syllabus | Question Paper]](https://cdn.slidesharecdn.com/ss_thumbnails/dss-rs-qp-may-2016-180428083739-thumbnail.jpg?width=640&height=640&fit=bounds)