Downloaded 126 times
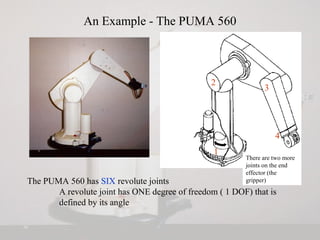
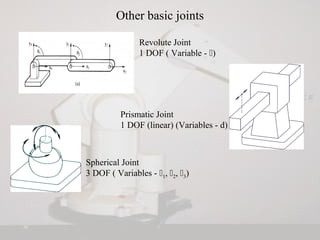
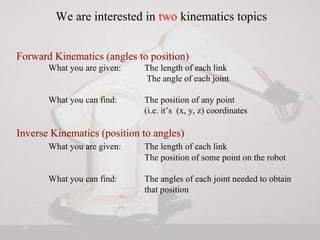
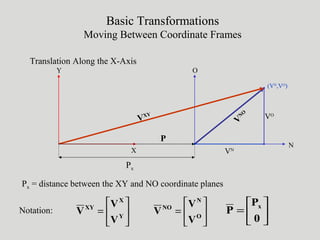
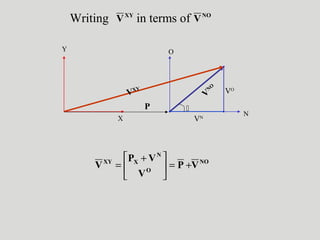
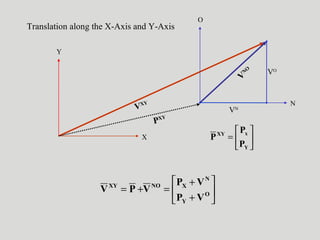
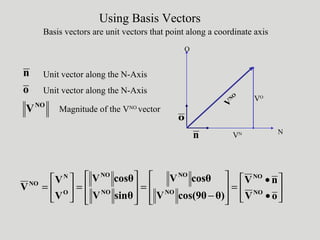
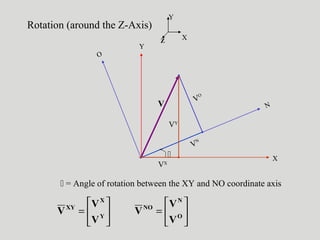
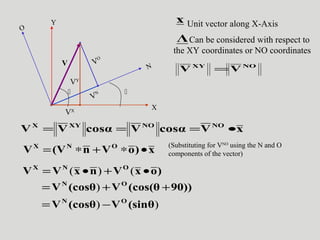
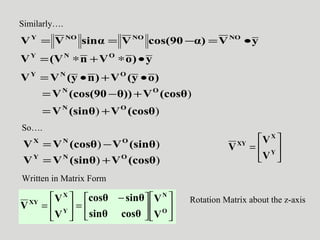
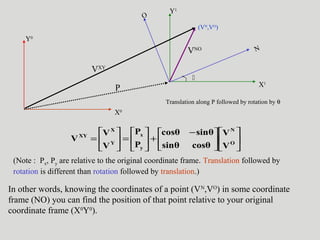
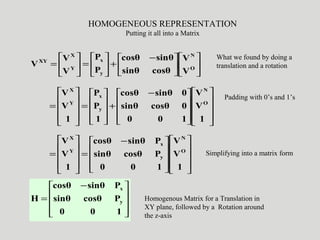
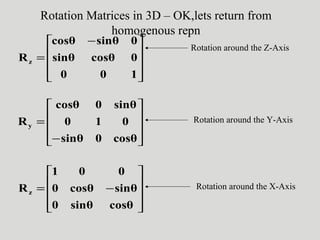
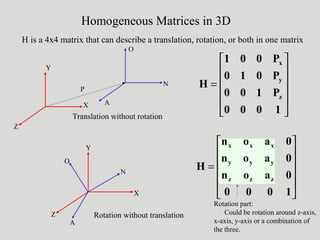
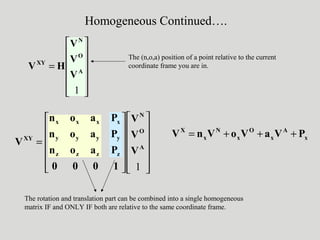
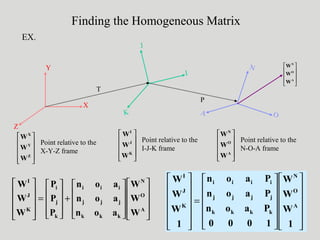
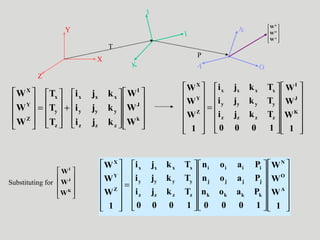
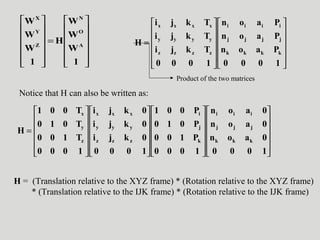
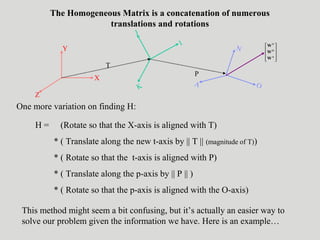

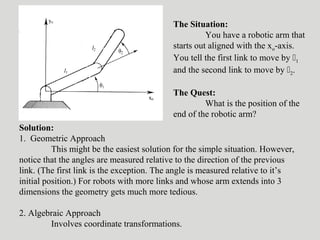
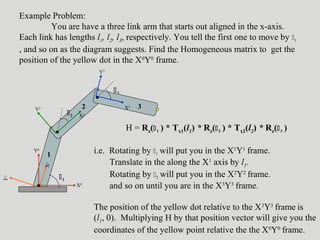
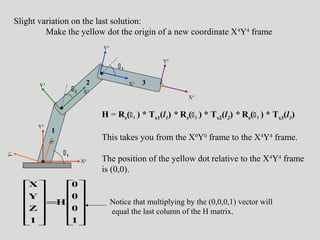
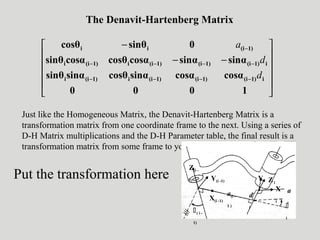

This document provides an introduction to robot kinematics. It discusses the basic joints used in robotics including revolute, spherical, and prismatic joints. It covers forward and inverse kinematics problems. Key concepts explained include homogeneous transformations using 4x4 matrices to represent rotations and translations between coordinate frames, and rotation matrices for transforming between 3D coordinate systems. Examples are provided for finding the homogeneous transformation matrix between different robot link frames.









































































