Downloaded 154 times


![vDefine DH :
• Create all six links using link command.
• Li = Link( [ theta_i di ai alpha_i sigma_i ] )
vDefine Robot:
• Create robot using links defined.
• rv3sd = SerialLink([SH UA FA WR HD TP])
vDefine Offset for the link:
• Create offset for links based on requirement.
• UA.offset = pi/2.
vDefine end-effector position:
• Create translation matrix for the position and add to robot using tool command.
• Ttool = transl([x y z])
• rv3sd.tool = Tool_Position
v Define Base of the robot:
• Create translation matrix for the position and add to robot using base command.
• rv3sd.base = Tbase
v Define Robot limits:
• To define limits of joint you use glim command
• UA.glim=[0 pi]
• This will limit joint UA movement between 0 and 180 degrees
•
How to create a ROBOT ?
RV3SD ROBOT](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-5-320.jpg)
![Visualization
v How to plot ?
• rv3ds.plot([0 0 0 0 0 0 ])
v How to teach the robot ?
• rv3ds.teach](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-6-320.jpg)
![Forward kinematics
vfkine
vCommand syntax is easy.
vJoint space coordinates are specified in vector
v
Joint space vector
Q = [0 -pi/6 -pi/6 0 pi/3 0]
Calculating transformation matrix
Trans_Matrix = rv3sd.fkine(Q)
Finished transformation matrix
Trans_Matrix= -0.0000 0.0000 1.0000
2.6344
0.0000 -1.0000 -0.0000 -0.1000
1.0000 0.0000 0.0000 -2.2324
0 0 0 1.0000](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-7-320.jpg)
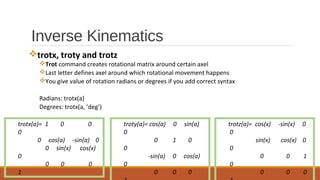
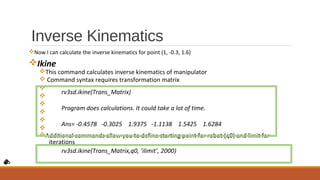
![Inverse Kinematics
v Inverse kinematics is bit more difficult
v First you need to define point in workspace
v
v Next you need to create transformation matrix for that point
v For this there are several commands
v
Point=[1, -0.3, 1.6]](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-8-320.jpg)
![Inverse Kinematics
vtransl
vThis command returns translational part of transformation matrix
Point=[1, -0.3, 1.6]
Transl(Point)= 1 0 0 1
0 1 0 -0.3
0 0 1 1.6
0 0 0 1](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-9-320.jpg)
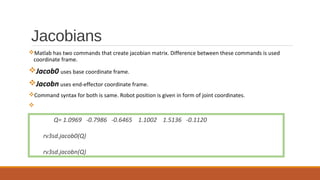
![Inverse Kinematics
vBy combining previous commands you can create transformation matrix for certain point in workspace
vAs an example I create transformation matrix for point (1, -0.3, 1.6) in frame that is rotared by -90
degrees around y-axel and then 180 degrees around z-axel
v
Point=[1, -0.3, 1.6]
Trans_Matrix= transl(Point)*troty(-90, ’deg’) *trotz(180, ’deg’)
Trans_Matrix= -0 -0 -1 1
0 -1 0 -0.03
-1 0 0 1.6
0 0 0 1](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-11-320.jpg)
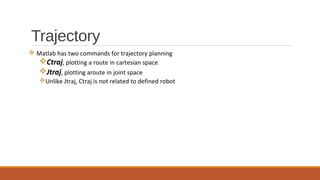
![Trajectory
vCtraj
vCommand returns straight path in cartesian space
vCommand syntax requires beginning and end points in form of translational matrix
vAddditional options are number of points along the path. In example I use 50 points along the path.
v Pb = [0.75 1.26 0.16]
Pa = [0.55 1.79 0.26]
Tb = transl(Pb)
Ta = transl(Pa)
ctraj(Tb,Ta,50)](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-15-320.jpg)
![Trajectory
vJtraj
vCommand returns joint space path between two points
v Command syntax requires beginning and end points in form joint coordinate vectors
v
Pb = [0.75 1.26 0.16]
Pa = [0.55 1.79 0.26]
We use ikine funtion and other commands teached before to create joint coordinate
vectors Qa and Qb.
[Q,QD,QDD] = jtraj(Qa, Qb, time_interval);
Gives joint space position(Q) , joint velocity (QD) and joint acceleration(QDD)](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-16-320.jpg)
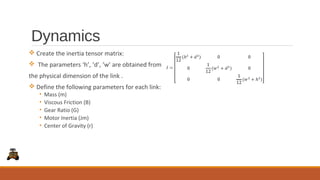
![Inverse Dynamics
v Joint torques can be created using Inverse Dynamics, which is required to move the work
piece over the joint space path.
v Create a joint space trajectory for the joint space motion.
v Syntax for joint space trajectory.
[Q,QD,QDD] = jtraj(Qa,Qb, time_interval);
v rne
• Joint torques for the trajectory Q is computed using the command ‘rne’ and the syntax is
Torque_Q = rv3ds.rne(Q, QD,QDD)
v
v](https://image.slidesharecdn.com/matlabroboticstoolbox-160223152647/85/Matlab-robotics-toolbox-18-320.jpg)


This document provides an overview of the MATLAB Robotics Toolbox. It describes that the toolbox contains functions for studying robot kinematics, dynamics, trajectory generation, visualization and simulation for arm-type robots. It also contains functions for mobile robots and computer vision. The document provides instructions on how to download, install and use the toolbox to define robots, perform forward and inverse kinematics, calculate Jacobians and trajectories, and simulate robot dynamics.