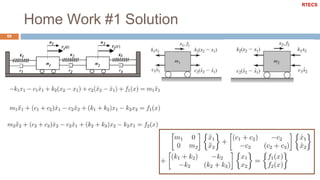
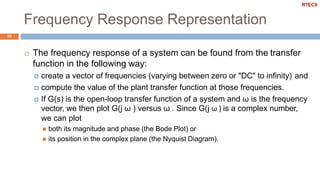
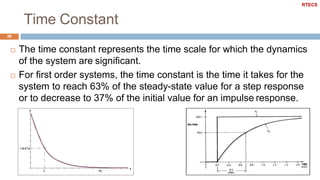
This document discusses dynamic systems and their analysis using transfer functions. It begins by defining dynamic systems as those whose output depends on both current and previous inputs/outputs. It then covers:
- Transfer function representations of linear time-invariant (LTI) systems using Laplace transforms.
- Key properties of transfer functions including poles, zeros and zero-pole-gain form.
- MATLAB representations of transfer functions.
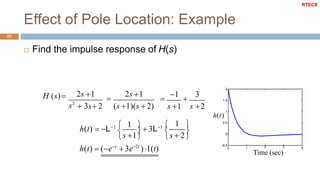
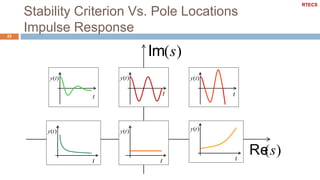
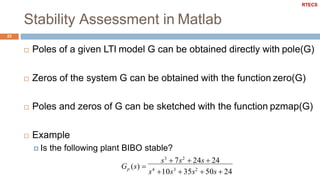
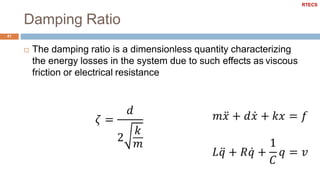
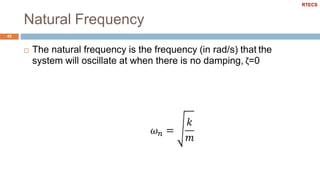
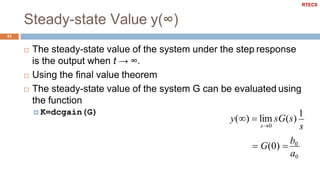
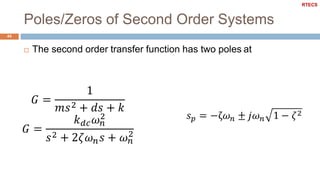
It also defines important concepts for analyzing dynamic systems like time and frequency response, stability, system order, and the effects of pole locations. Specific discussions are included on analyzing first and second order systems.
![MATLAB Representations of Transfer Functions
9
num=[b1,b2,. . .,bm,bm+1];
den=[1,a1,a2,. . .,an−1, an];
G=tf(num,den)
Example
s4
2s3
3s2
4s 5
s 5
G(s)
RTECS](https://image.slidesharecdn.com/03dynamic-191114161657/85/03-dynamic-system-8-320.jpg)
![Zero-Pole-Gain Representation In MATLAB
11
z=-[z1; z2; · · · ; zm];
p=-[p1; p2; · · · ; pn];
G=zpk(z,p,K)
Example
s 3
(s 2)(s 4)(s 5)
pzmap
Plots the pole-zero map of the LTI model sys
RTECS](https://image.slidesharecdn.com/03dynamic-191114161657/85/03-dynamic-system-10-320.jpg)
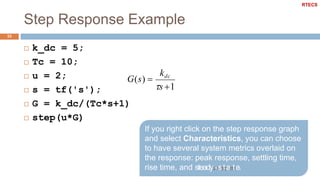
![Step Response Example
32
a = 5;
num = a;
den = [1 a];
figure
step(num,den);
grid on
a
s a
G(s)
0 0.2 0.4 0.8 1 1.2
0
0.2
0.1
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
0.6
Time (sec)
Amplitude
RTECS](https://image.slidesharecdn.com/03dynamic-191114161657/85/03-dynamic-system-31-320.jpg)
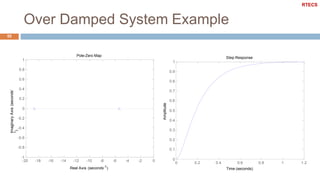
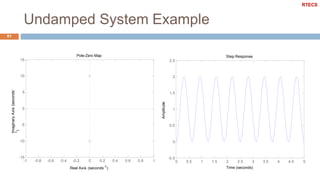
![Under Damped System Example
47
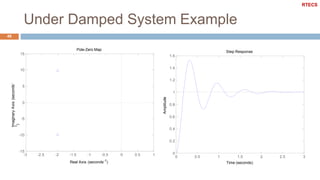
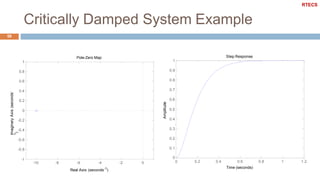
Plot the map of poles and zeros & the step response of the
second order system with the following characteristics
k_dc = 1; w_n = 10; zeta = 0.2;
s = tf('s');
G1 = k_dc*w_n^2/(s^2 + 2*zeta*w_n*s + w_n^2);
figure
pzmap(G1)
axis([-3 1 -15 15])
figure
step(G1)
RTECS](https://image.slidesharecdn.com/03dynamic-191114161657/85/03-dynamic-system-46-320.jpg)