Download as PDF, PPTX






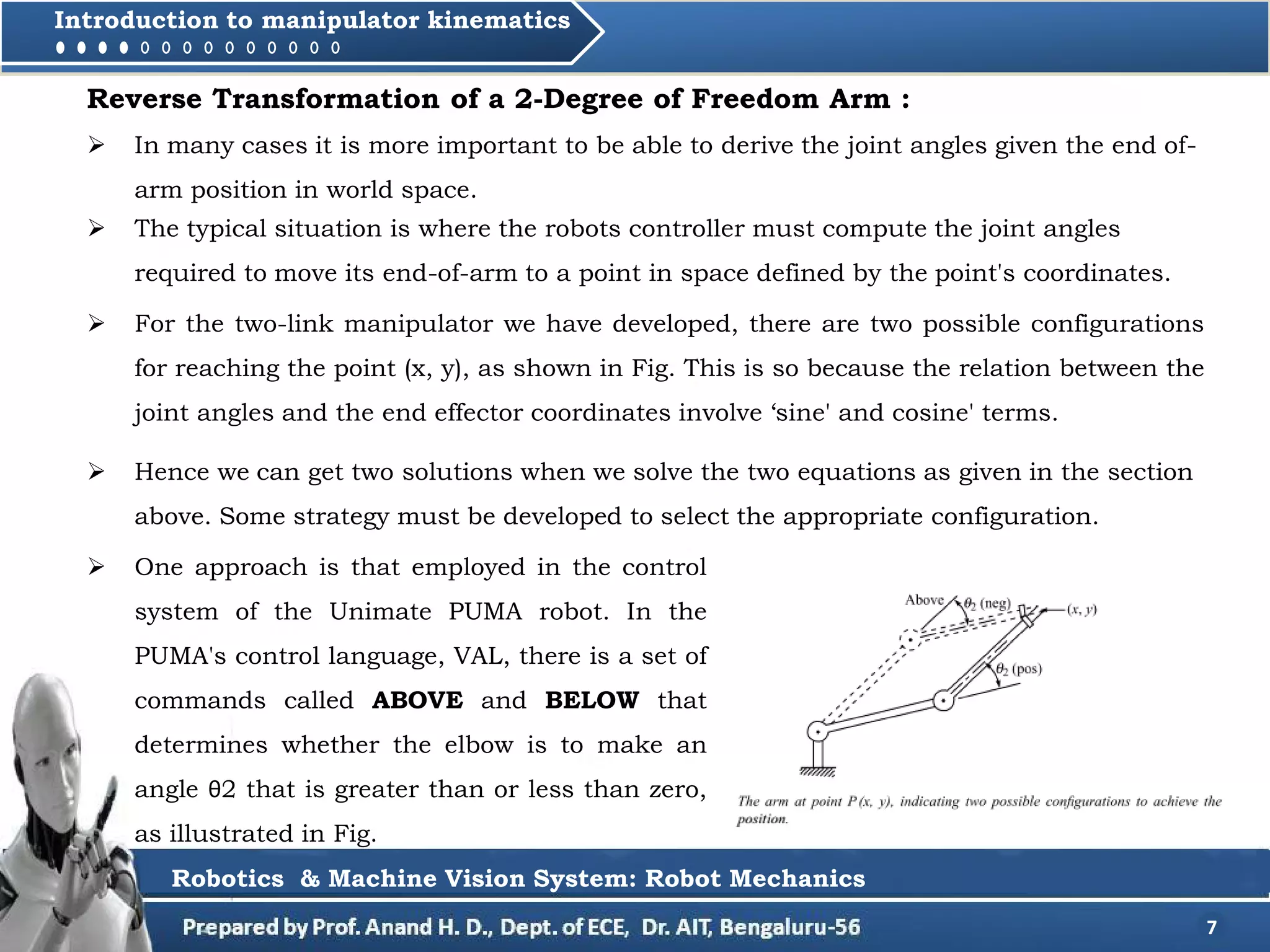
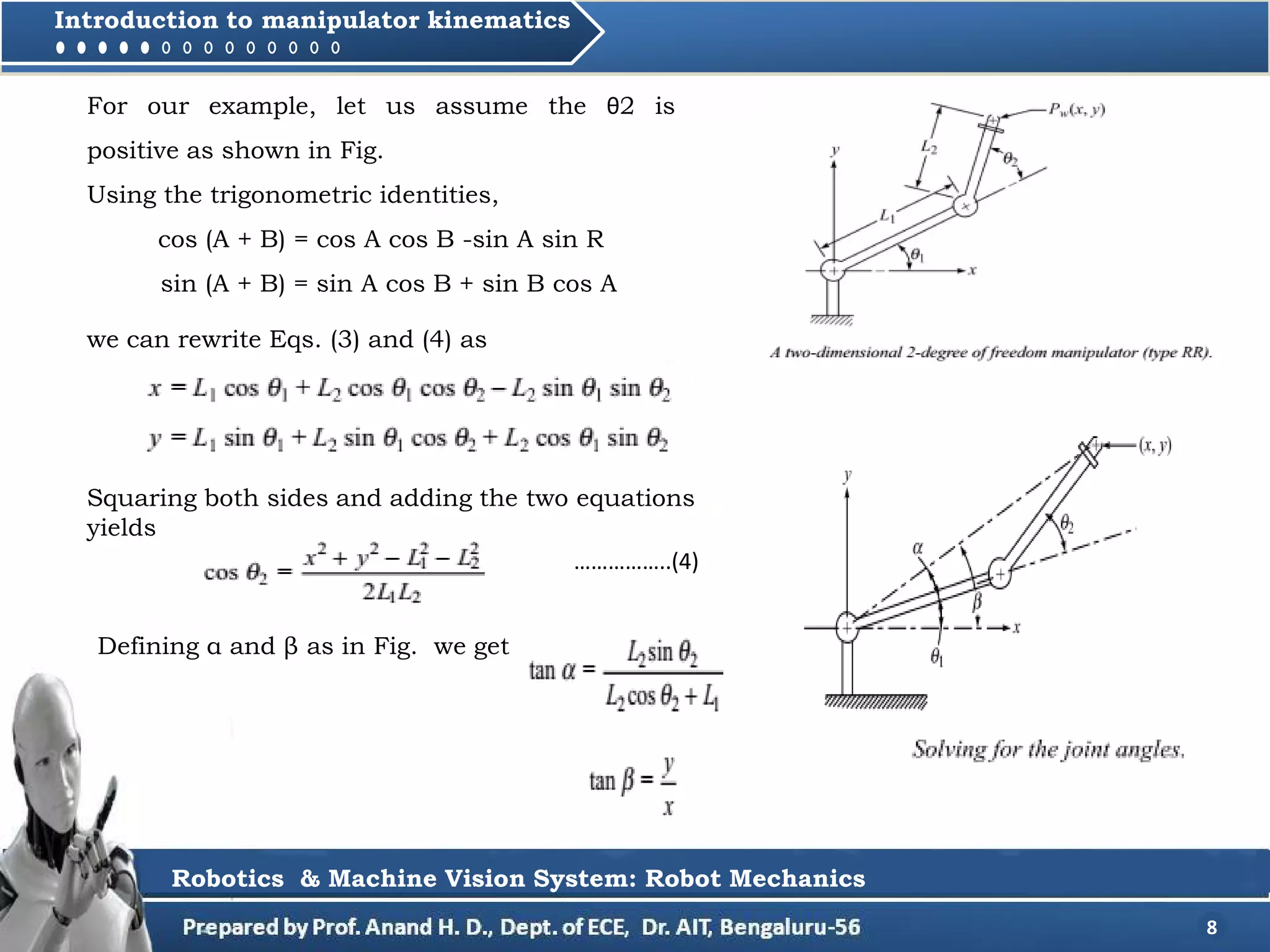






















The document provides an extensive overview of robotics and machine vision systems, focusing on manipulator kinematics, robot mechanics, and control methods. It discusses key topics such as position representation in joint and world space, forward and inverse kinematics, and the dynamics involved in controlling robotic arms. The document also explores homogeneous transformations, different motion types, and the analysis of torques and forces required for manipulating robot arms.