Download as PDF, PPTX

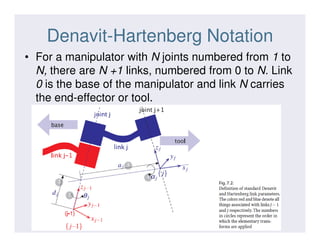

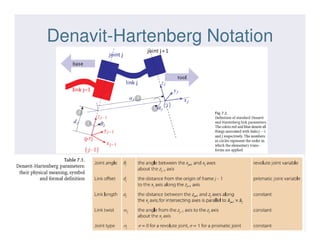

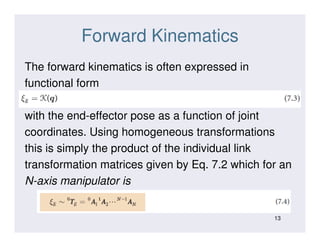


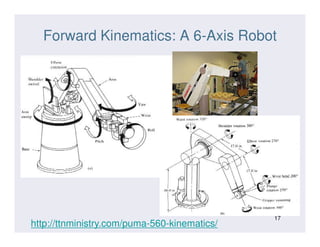
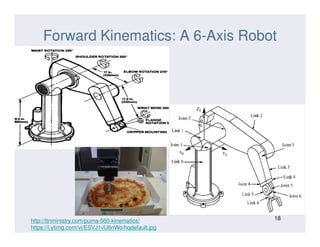
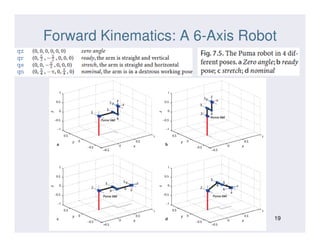



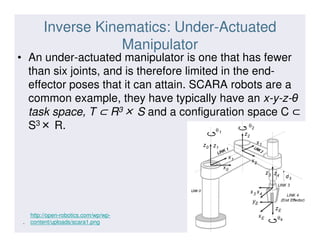


The document discusses various kinematic problems in robotics including forward kinematics, inverse kinematics, and Denavit-Hartenberg notation. Forward kinematics determines the pose of the end-effector given the joint angles, while inverse kinematics determines the required joint angles to achieve a desired end-effector pose. Denavit-Hartenberg notation provides a systematic way to describe the geometry of robot links and joints. The document also covers numerical solutions to inverse kinematics for robots without closed-form solutions and kinematics of special robot types like under-actuated and redundant manipulators.























































































