Downloaded 12 times
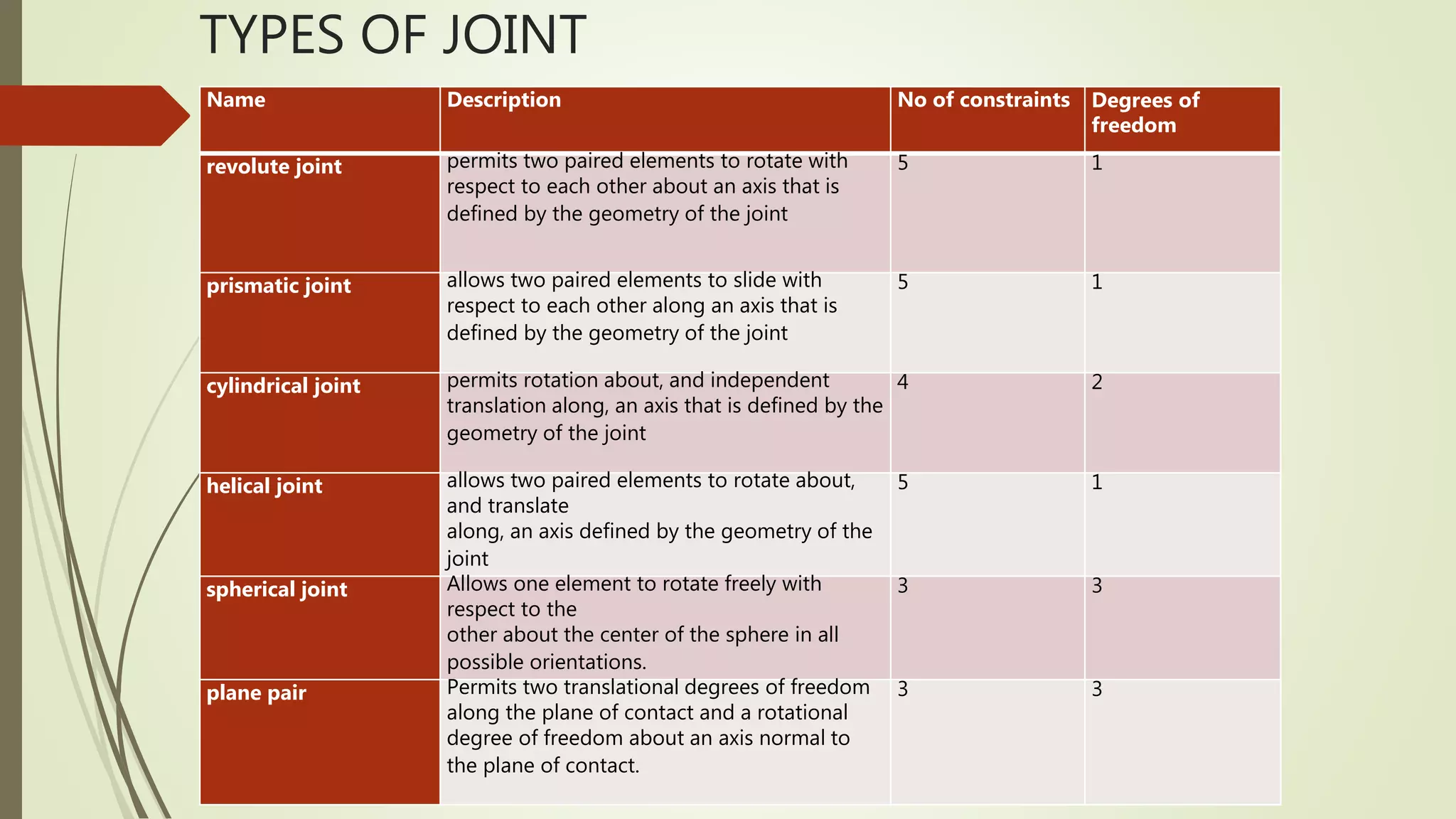

This document defines and classifies robots. It explains that a robot is a programmable manipulator designed to perform tasks. Industrial robots are used for manufacturing and have declining costs. Robots have links, joints, and degrees of freedom that determine their motion. They are classified by drive type, kinematic structure, degrees of freedom, and workspace geometry. Common robot types include Cartesian, cylindrical, spherical, articulated, and SCARA robots.