Downloaded 90 times

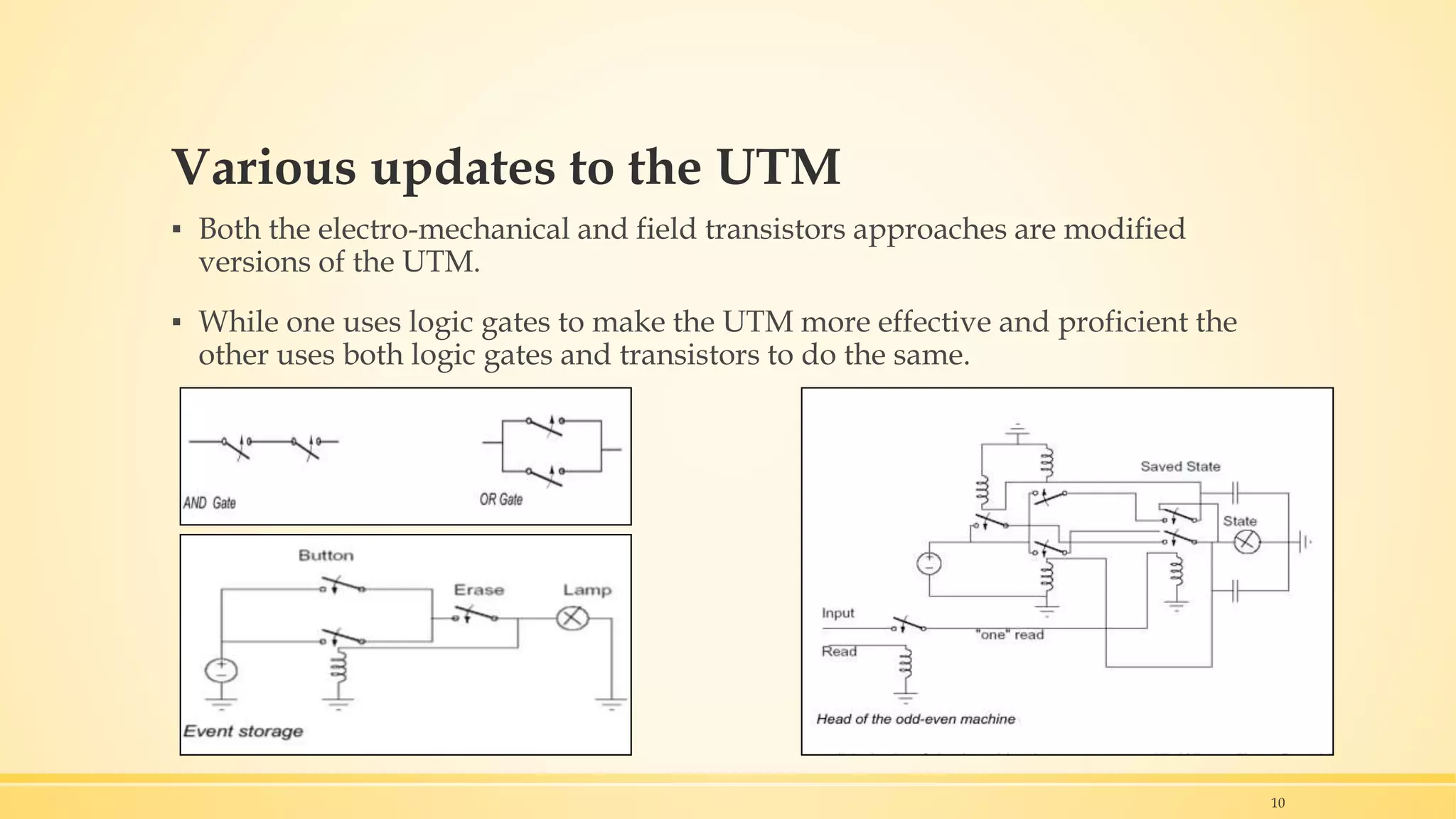


(1) Nanotechnology involves creating objects smaller than 100 nanometers and has applications in medicine, environmental science, and more. Nanobots are nanoscale machines that can perform tasks like making repairs inside the body. (2) Nanobots could be constructed using sensors, actuators, and controls at the nanoscale. They may move through floating, diffusion, or other means. Control approaches include central control, simple circuits, and swarming behavior. Computing at the nanoscale could use approaches like molecular electronics or DNA computing. (3) Potential advantages of nanobots include curing diseases, targeted drug delivery with few side effects, and lower manufacturing costs at scale. Challenges include ensuring accuracy


















































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)









