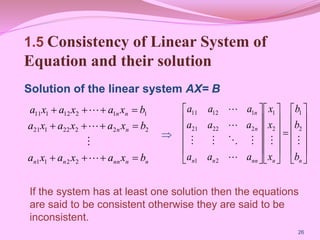
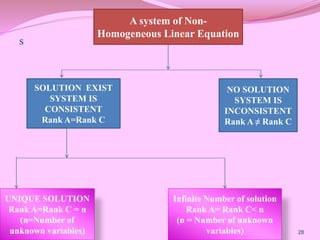
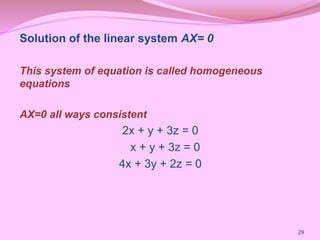
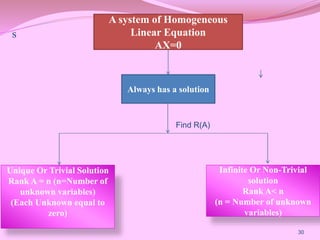
This document provides definitions and examples of different types of matrices including: real matrix, square matrix, row matrix, column matrix, null matrix, sub-matrix, diagonal matrix, scalar matrix, unit matrix, upper triangular matrix, lower triangular matrix, triangular matrix, single element matrix, equal matrices, singular and non-singular matrices. It also discusses elementary row and column transformations, rank of a matrix, solutions to homogeneous and non-homogeneous systems of linear equations, characteristic equations, eigenvectors and eigenvalues.



![(3) Row Matrix :-
A matrix having only one row and any
number of columns,
i.e., a matrix of order 1 n is called a row
matrix.
[2 5 -3 0] is a row matrix.
Example:-](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-11-320.jpg)
![(7) Diagonal Matrix :-
A square matrix in which all non – diagonal
elements are zero is called a diagonal matrix.
i.e., A = [a ] is a diagonal matrix if a = 0 for i j.
is a diagonal matrix.
ij n
n ij
Example:-
0
0
0
0
1
0
0
0
2](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-15-320.jpg)
![(8) Scalar Matrix:-
A diagonal matrix in which all the diagonal
elements are equal to a scalar, say k, is called a
scalar matrix.
i.e., A = [a ] is a scalar matrix if
is a scalar matrix.
2
0
0
0
2
0
0
0
2
ij n
n
j
i
when
k
j
i
when
0
aij
Example :-](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-16-320.jpg)
![(9) Unit Matrix or Identity Matrix:-
A scalar matrix in which each diagonal
element is 1 is called a unit or identity matrix. It is
denoted by .
i.e., A = [a ] is a unit matrix if
is a unit matrix.
n
I
ij n
n
j
i
when
1
j
i
when
0
aij
Example
1
0
0
1](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-17-320.jpg)
![(10) Upper Triangular Matrix.
A square matrix in which all the elements
below the principal diagonal are zero is called an
upper triangular matrix.
i.e., A = [a ] is an upper triangular matrix if a = 0
for i > j
is an upper triangular
matrix
3
0
0
5
1
0
4
3
2
ij n
n ij
Example:-](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-18-320.jpg)
![(11) Lower Triangular Matrix.
A square matrix in which all the elements
above the principal diagonal are zero is called a
lower triangular matrix.
i.e., A = [a ] is a lower triangular matrix if a = 0
for i < j
is a lower triangular
matrix.
ij n
n ij
Example:-
0
2
3
0
6
5
0
0
1](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-19-320.jpg)
![(12) Triangular Matrix:-
A triangular matrix is either upper
triangular or lower triangular.
(13) Single Element Matrix:-
A matrix having only one element is
called a single element matrix.
i.e., any matrix [3] is a single element matrix.](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-20-320.jpg)
![(14) Equal Matrices:-
Two matrices A and B are said to be equal iff
they have the same order and their corresponding
elements are equal.
i.e., if A = and B = , then A = B
iff a) m = p and n = q
b) a = b for all i and j.
q
p
ij]
b
[
n
m
ij]
a
[
ij ij](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-21-320.jpg)
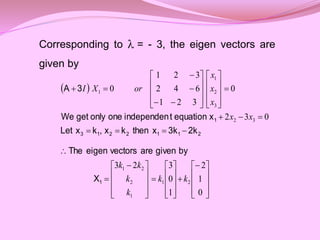
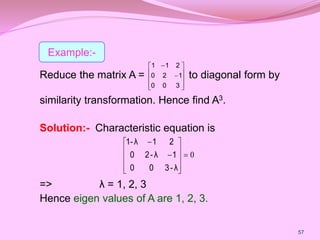
![Thus,
5
3,
3,
λ
0
5)
3)(λ
3)(λ
(λ
0
15)
2λ
3)(λ
(λ
it.
satisfies
3
λ
trial,
By
0
45
21λ
λ
λ
0
λ)]
1(1
4
3[
6]
2λ
2[
12]
λ)
λ(1
λ)[
2
(
2
2
3
the eigen values of A are -3, -3, 5.](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-42-320.jpg)
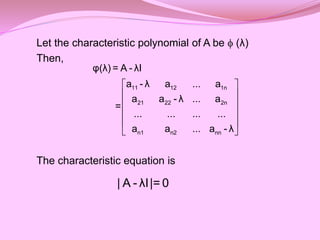
![1.8 CAYLEY HAMILTON THEOREM
Every square matrix satisfies its own
characteristic equation.
Let A = [aij]n×n be a square matrix
then,
n
n
nn
2
n
1
n
n
2
22
21
n
1
12
11
a
...
a
a
....
....
....
....
a
...
a
a
a
...
a
a
A
](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-46-320.jpg)
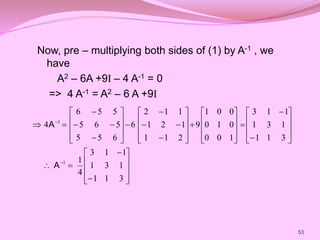
![Note 1:- Premultiplying equation (1) by A-1 , we
have
n n-1 n-2
0 1 2 n
n n-1 n-2
0 1 2 n
We are to prove that
p λ +p λ +p λ +...+p = 0
p A +p A +p A +...+p I= 0 ...(1)
I
n-1 n-2 n-3 -1
0 1 2 n-1 n
-1 n-1 n-2 n-3
0 1 2 n-1
n
0 =p A +p A +p A +...+p +p A
1
A =- [p A +p A +p A +...+p I]
p](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-48-320.jpg)
![
3
0
0
0
2
0
0
0
1
2
0
0
2
1
-
0
3
1
1
3
0
0
1
2
0
2
1
1
2
1
0
0
1
1
-
0
2
1
1
1
AM
M 1
62
Now, since D = M-1AM
=> A = MDM-1
A2 = (MDM-1) (MDM-1)
= MD2M-1 [since M-1M = I]](https://image.slidesharecdn.com/matrixppt-230208150112-07b118ba/85/Matrix_PPT-pptx-62-320.jpg)