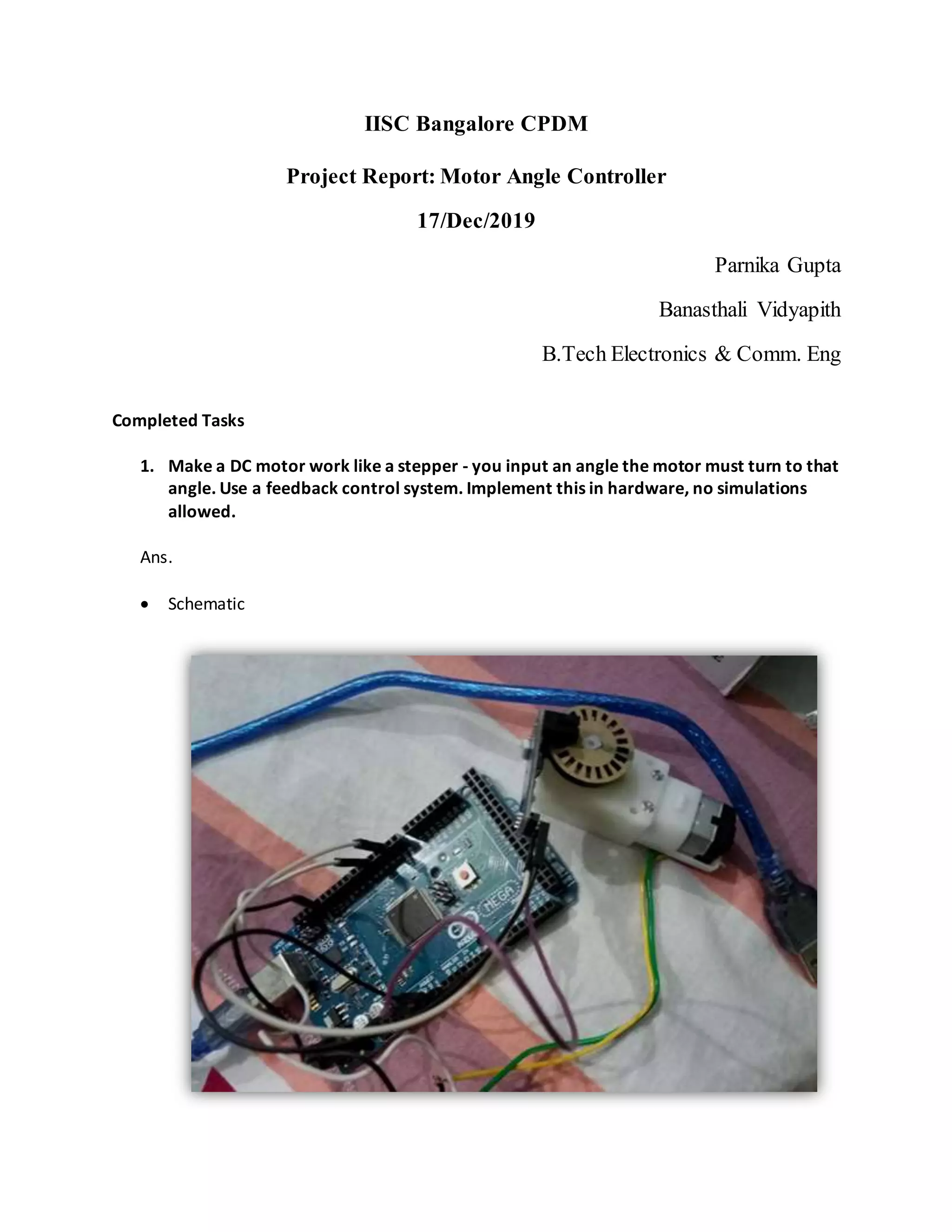
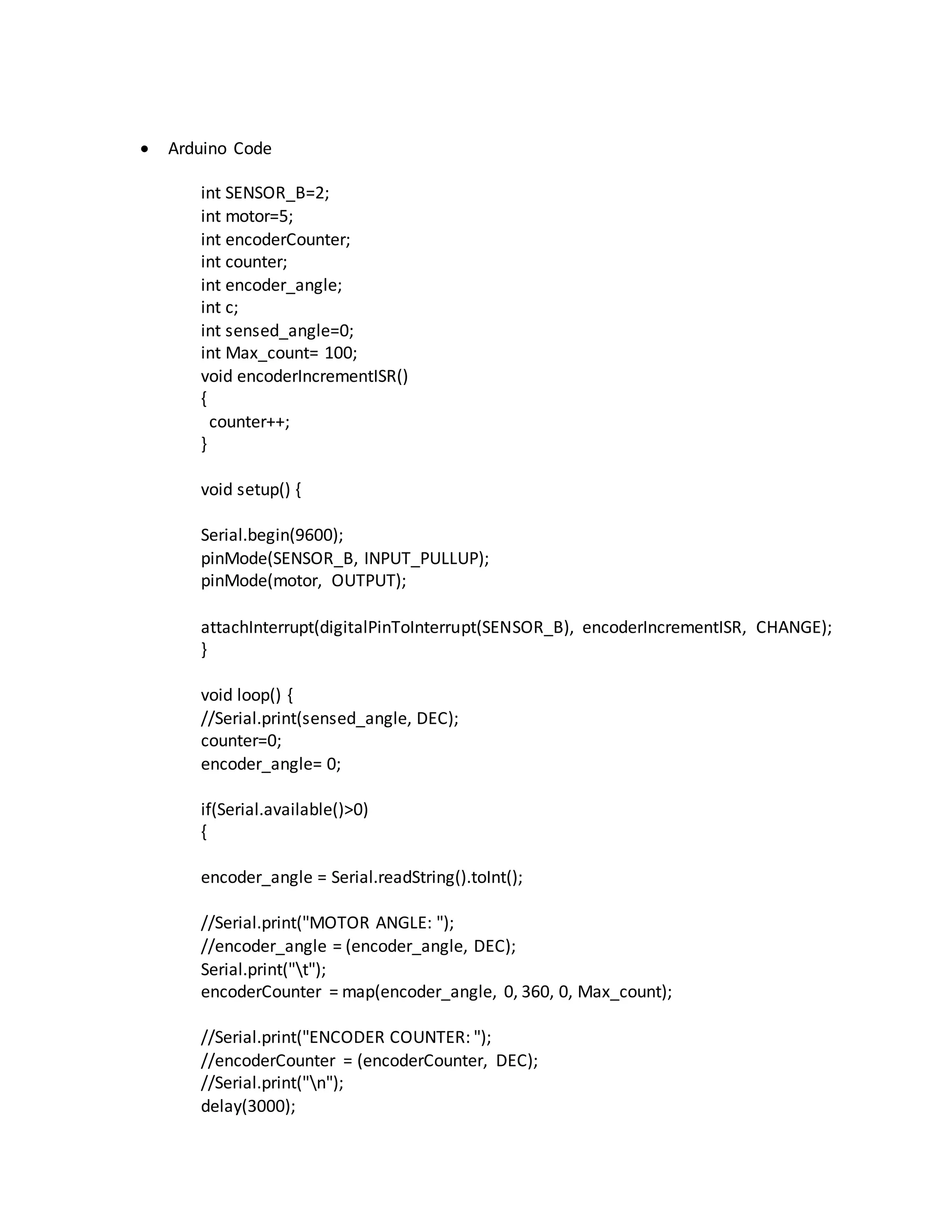
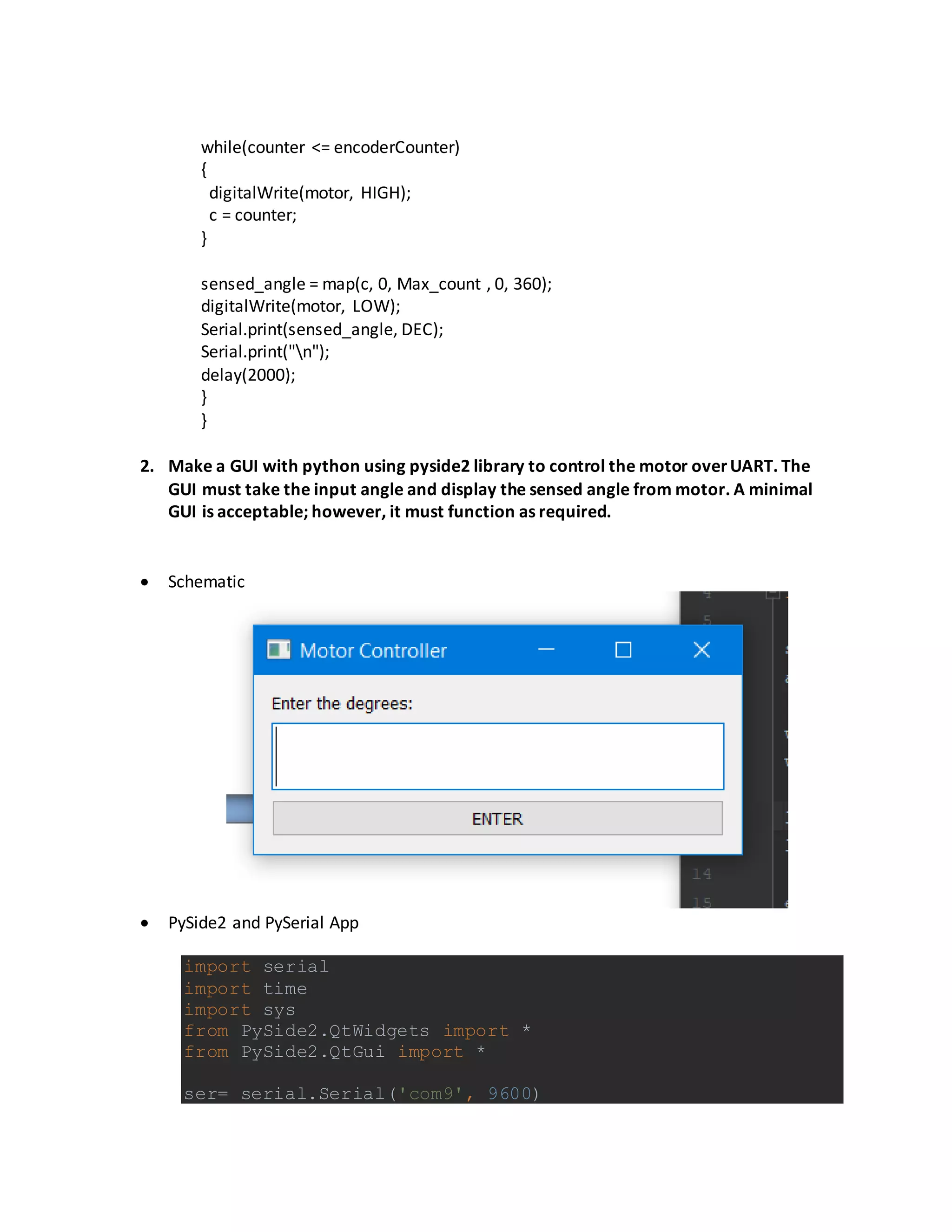
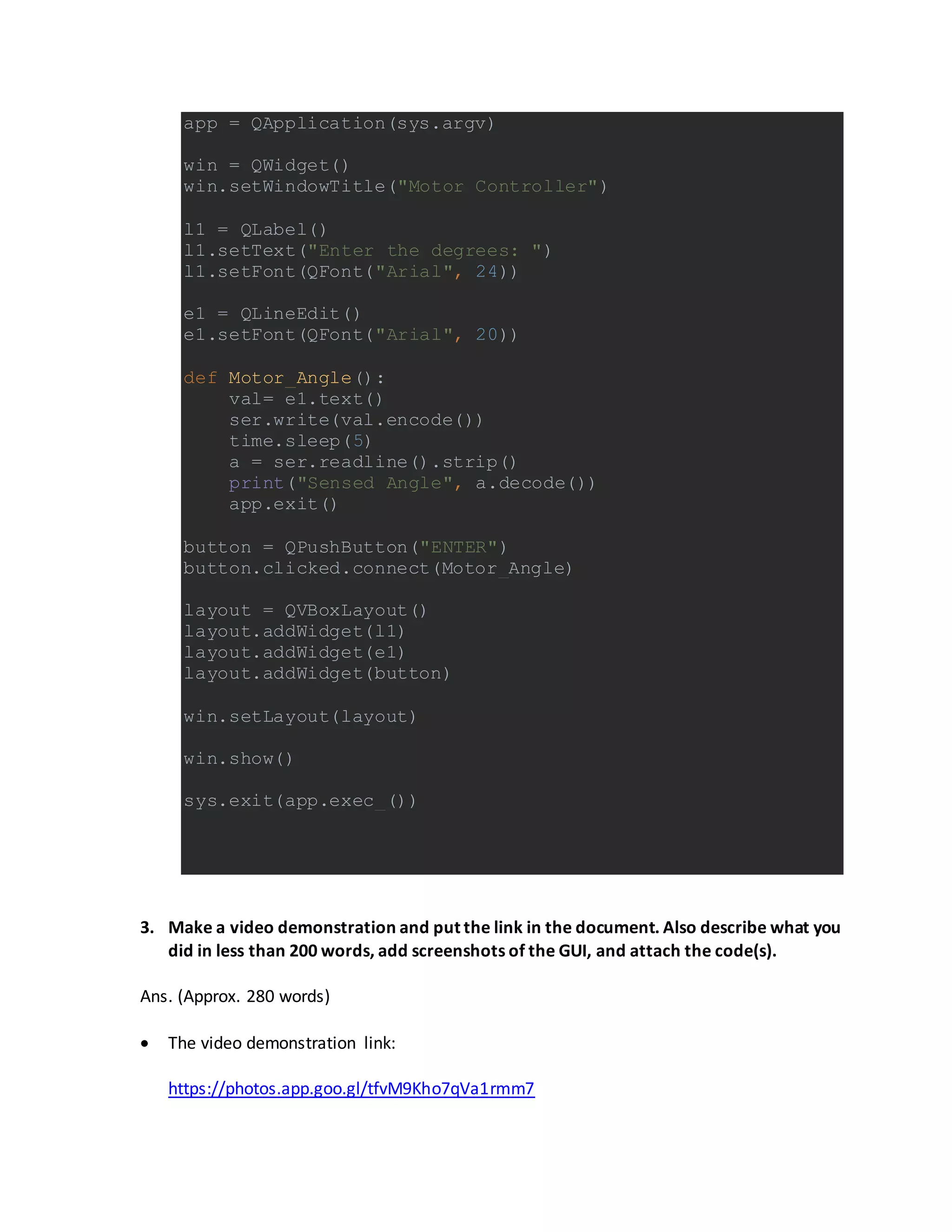
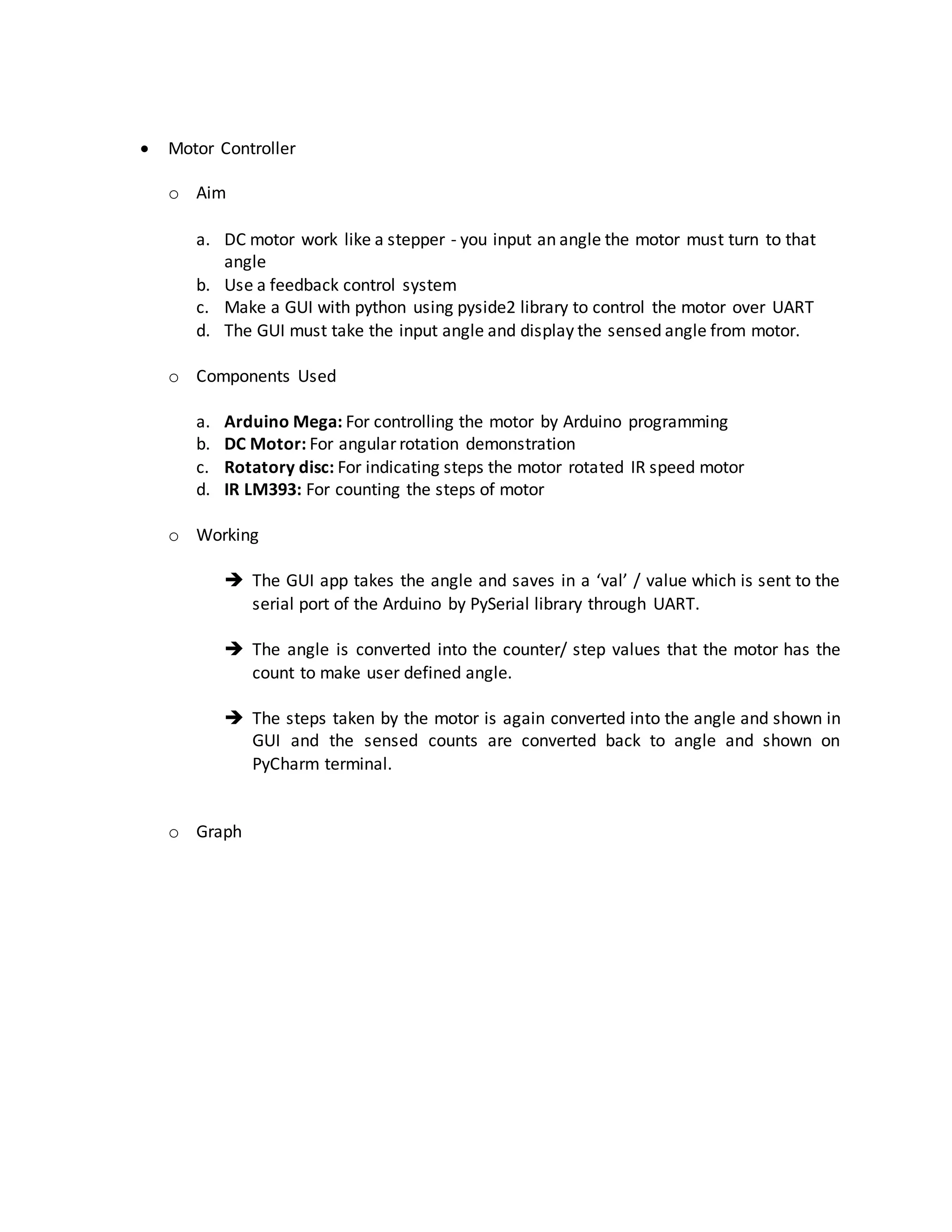
The document outlines a project report on creating a motor angle controller using a DC motor and Arduino, which allows the motor to function like a stepper motor based on a user-defined angle input and feedback control system. It includes details on the implementation using Arduino code, a graphical user interface (GUI) built with Python's PySide2 library, and showcases the components used as well as their functionality. Additionally, the report discusses non-contact temperature sensors used in medical applications, highlighting their working principles and types.