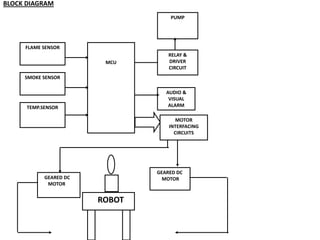
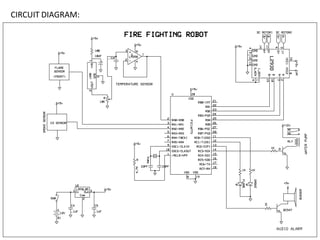
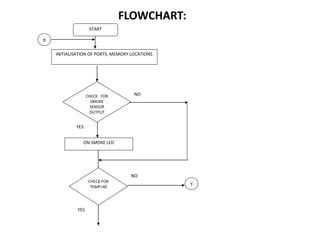
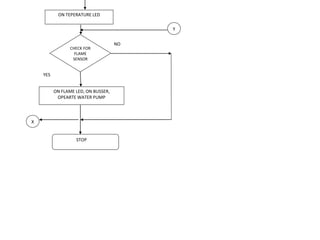
The document describes an automatic firefighting robot that can detect and extinguish fires. It uses sensors to detect temperature, smoke, and flames. If the sensors detect a fire, the microcontroller activates a water pump to extinguish it. The robot reduces human labor needed for firefighting and decreases damage from fires. It is designed to monitor hazardous areas for natural disasters and bomb explosions.