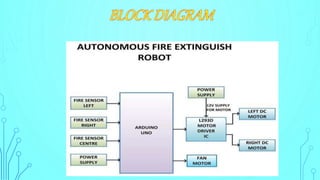
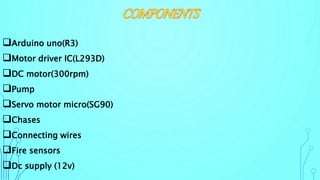
This document describes the design of an autonomous firefighting robot. The robot uses various sensors and components to locate and extinguish fires on its own without human assistance. It is equipped with IR fire sensors to detect the direction of fires, a motor driver and DC motors to navigate towards the fire, and a servo motor mounted water pump to extinguish fires. The goal is to create a robot that can reduce fire accidents and save lives and property through fully autonomous fire detection and response.