Recommended

More Related Content
What's hot
What's hot (20)
Similar to quadcopter
Similar to quadcopter (20)
quadcopter
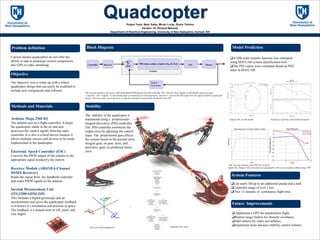
- 1. Project Team: Marc Salas, Micah Lucas, Rudra Timsina Advisor: Dr. Richard Messner Department of Electrical Engineering, University of New Hampshire, Durham, NH Current market quadcopters do not offer the ability to add or prototype custom components like GPS or video streaming. Our objective was to come up with a robust quadcopter design that can easily be modified to include new components and software. Arduino Mega 2560 R3 The arduino acts as a flight controller. It keeps the quadcopter stable in the air and also processes the control signals from the radio controller. It is also a critical device because it allows multiple sensors and devices to be easily implemented in the quadcopter. Electronic Speed Controller (ESC) Converts the PWM output of the arduino to the appropriate signal needed by the motors Receiver Module (AR6210 6-Channel DSMX Receiver) Reads the signal from the handheld controller and sends PWM signals to the arduino. Inertial Measurement Unit (ITG3200/ADXL345) This includes a digital gyroscope and an accelerometer and gives the quadcopter feedback so it knows it’s orientation and position in space. The feedback is a sensed error in roll, pitch, and yaw angles. Problem definition Objective Methods and Materials The receiver interprets the pulse width modulated (PWM)signals from the controller. The PID uses these signals as the throttle input and angle “setpoints”. The “setpoint “is the desired angle of orientation for the quadcopter. The ESC’s convert the PID output into the signal needed to operate the motors. The Gyroscope senses the error in angular orientation and provides feedback to the PID. Block Diagram Controller Receiver Arduino ESCPID( input, output, setpoint, Kp, Ki, Kd) Motors Digital Gyroscope 0 0.5 1 1.5 -35 -30 -25 -20 -15 -10 -5 0 5 Time Orientation(degrees) Step Response Roll Pitch Step Response Time Amplitude 0 2 4 6 8 10 12 14 16 18 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Step Response of a Closed Transfer Function The stability of the quadcopter is maintained using a proportional- integral-derivative (PID) controller. The PID controller minimizes the output error by adjusting the control input. The proportional gain affects the system based on the present error, integral gain, on past error, and derivative gain, on predicted future error. Stability Model Prediction System Features Left: The step response after PID was realized. Right:The change in the orientation of a quadcopter with a step response without using PID Implement a GPS for autonomous flight. Realize range finders for obstacle avoidance. Add camera for video surveillance. Implement more advance stability control scheme. Can easily lift up to an additional pound and a half. Controller range of over 1 km. Over 15 minutes of continuous flight time. Future Improvements Program Flow chart A fifth order transfer function was estimated using MATLAB system identification tool. The PID values were estimated based on PID tuner in MATLAB. 10 -3 10 -2 10 -1 10 0 10 1 10 2 10 3 10 4 10 5 -180 0 180 360 540 720 Phase(deg) Bode Diagram Gm=54.6 dB (at 10.1 rad/s) , Pm=Inf Frequency (rad/s) -100 -80 -60 -40 -20 0 From: u1 To: y1 Magnitude(dB) Frequency response of the predicted modal. Gyro axis of the quadcopter Real Axis ImaginaryAxis -1 -0.5 0 0.5 1 1.5 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 From: Step To: Transfer Fcn 0 dB -20 dB -10 dB -6 dB -4 dB-2 dB 20 dB 10 dB 6 dB 4 dB 2 dB linsys7 Nyquist plot for the modal.