Download to read offline
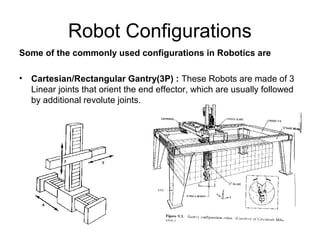
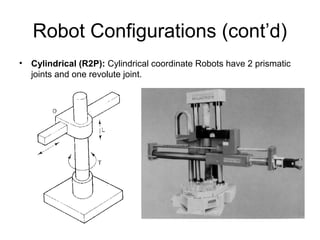
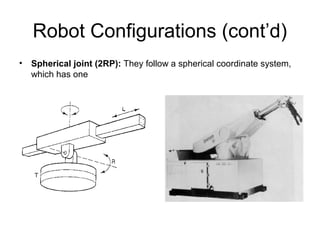
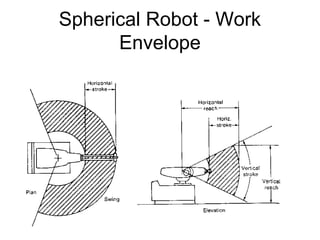
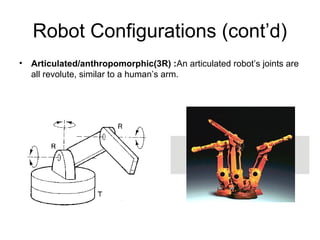
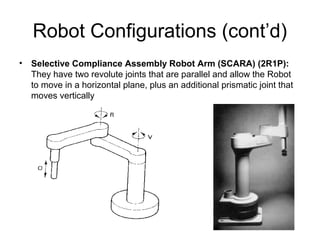
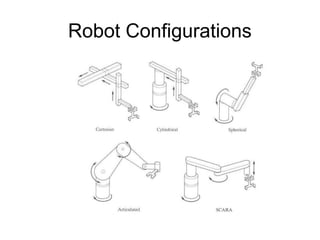
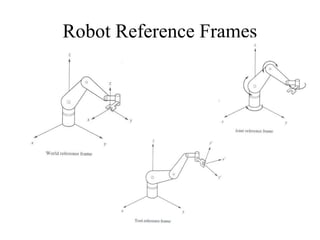
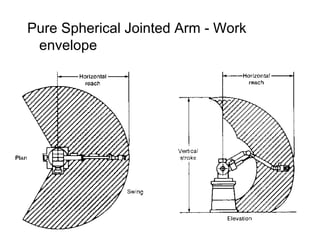
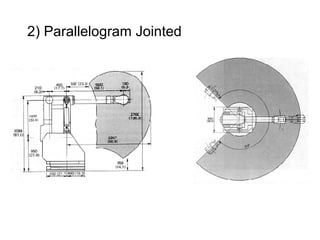
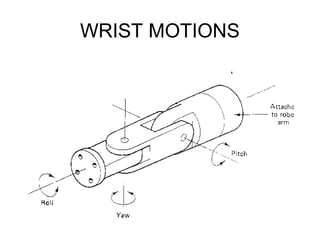

1. The document introduces various types of industrial robots including Cartesian, cylindrical, spherical, and articulated robots. It describes their different configurations and work envelopes. 2. Robot components like manipulators, end effectors, actuators, sensors, and controllers are defined. Reference frames and work envelopes are also explained. 3. Robot programming methods including teach pendants, lead-through programming, and programming languages are outlined. Different control methods like point-to-point and continuous path control are also introduced.