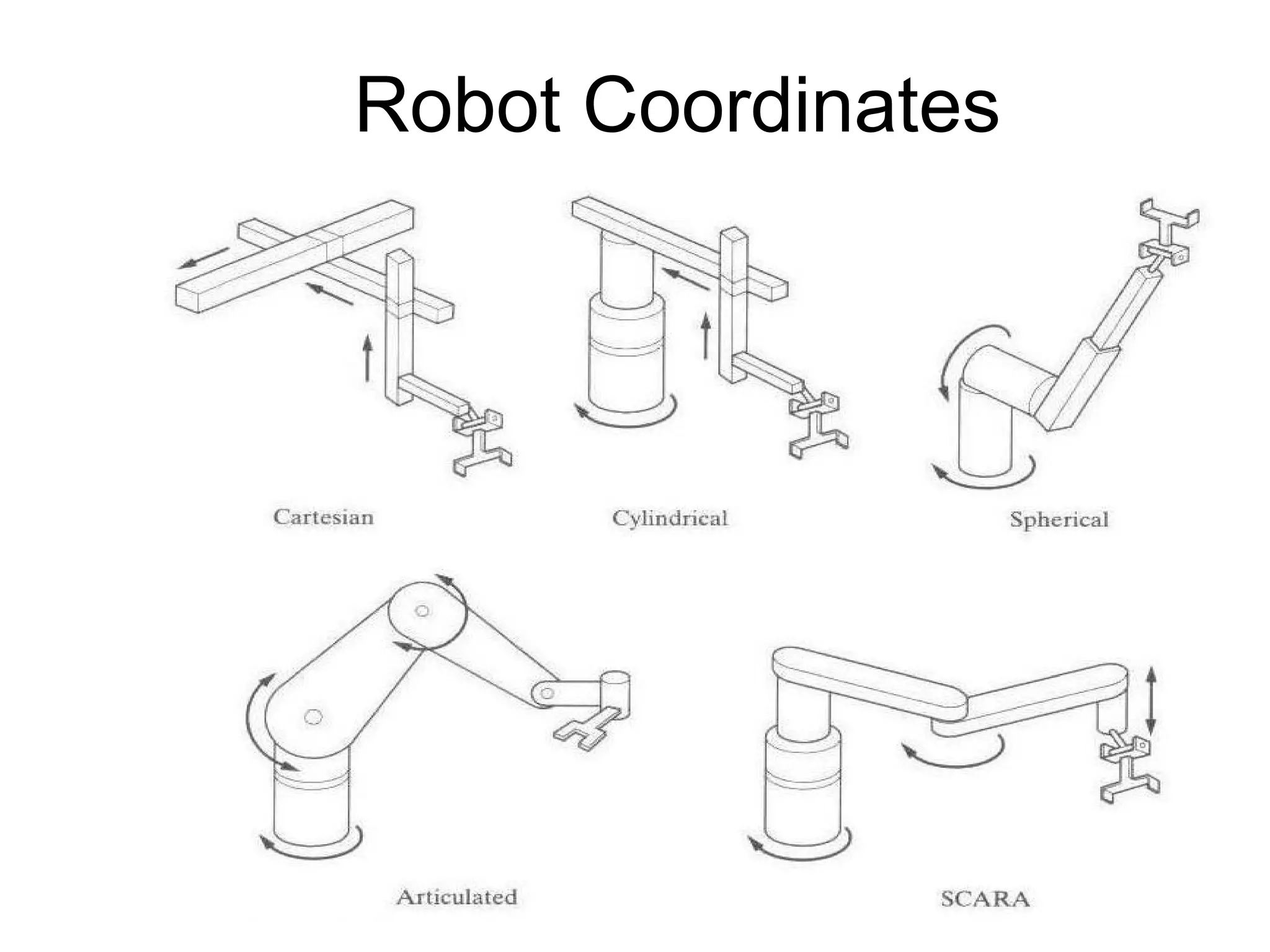
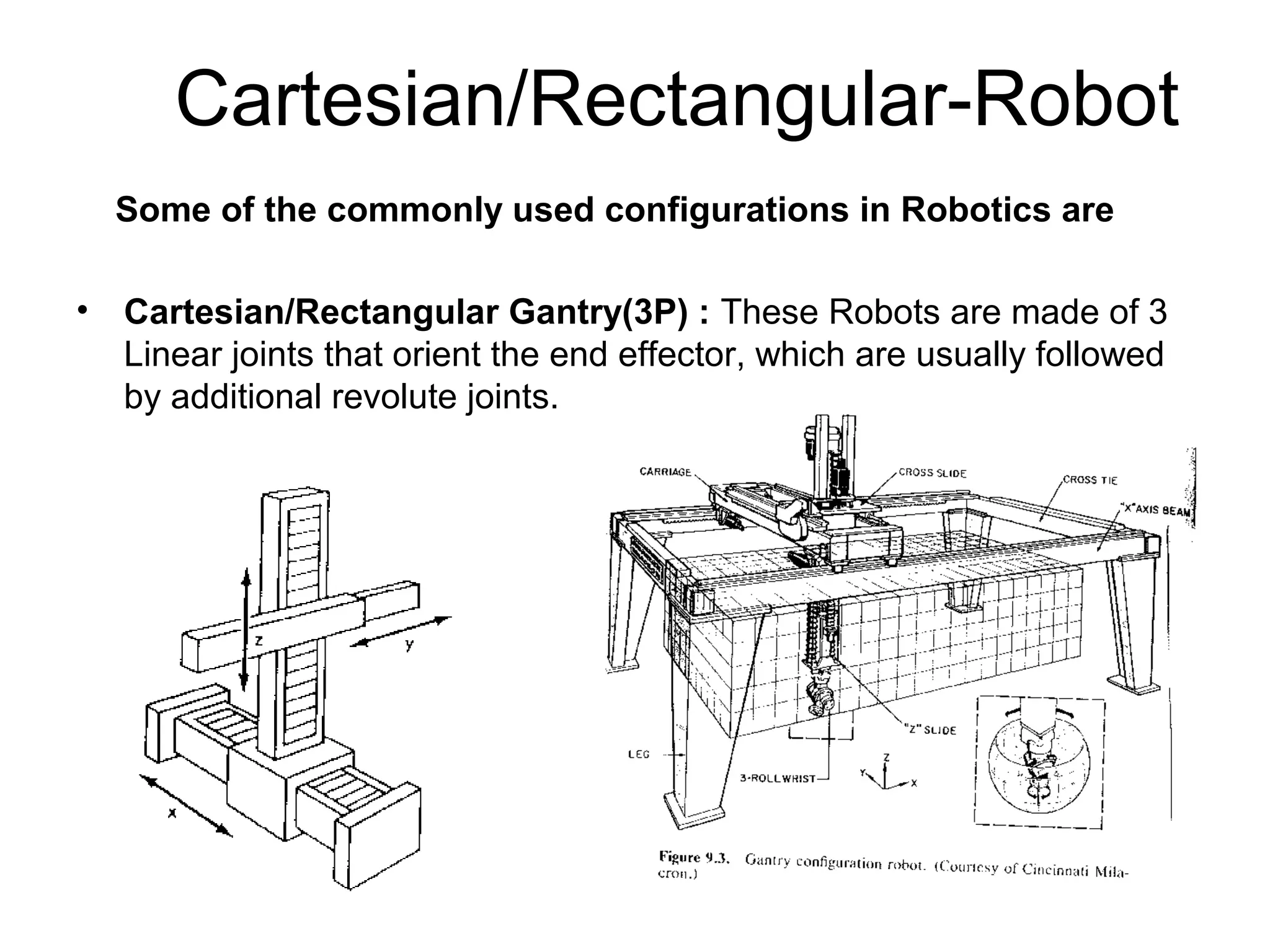
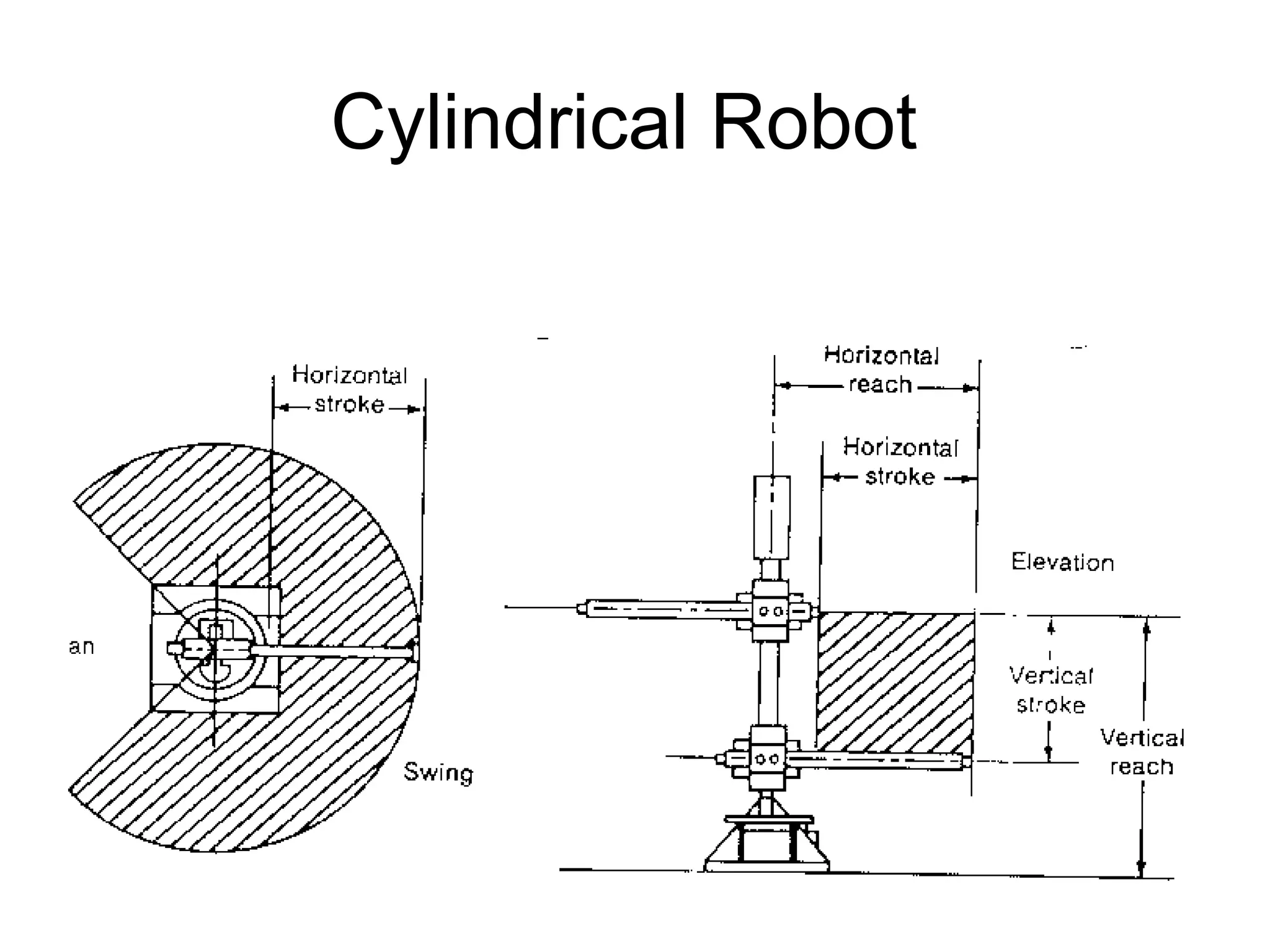
This document provides an introduction and overview of robotics. It discusses the timeline of robot development from the 1920s to the 1990s. It then covers classifications of robots based on their function and movement. The document outlines common robot components like actuators, sensors, and controllers. It also describes different robot arm configurations and coordinate systems. Finally, it briefly discusses robot reference frames, control methods, and programming.