The document discusses the history and basics of robotics. It covers:
1. The origin of the term "robot" from a 1920 play and its Czech meaning of "forced labour."
2. The definition of a robot as a mechanical device that performs human tasks automatically or by remote control.
3. Isaac Asimov's three laws of robotics which state that a robot cannot harm humans and must obey human orders except when it conflicts with the first law.
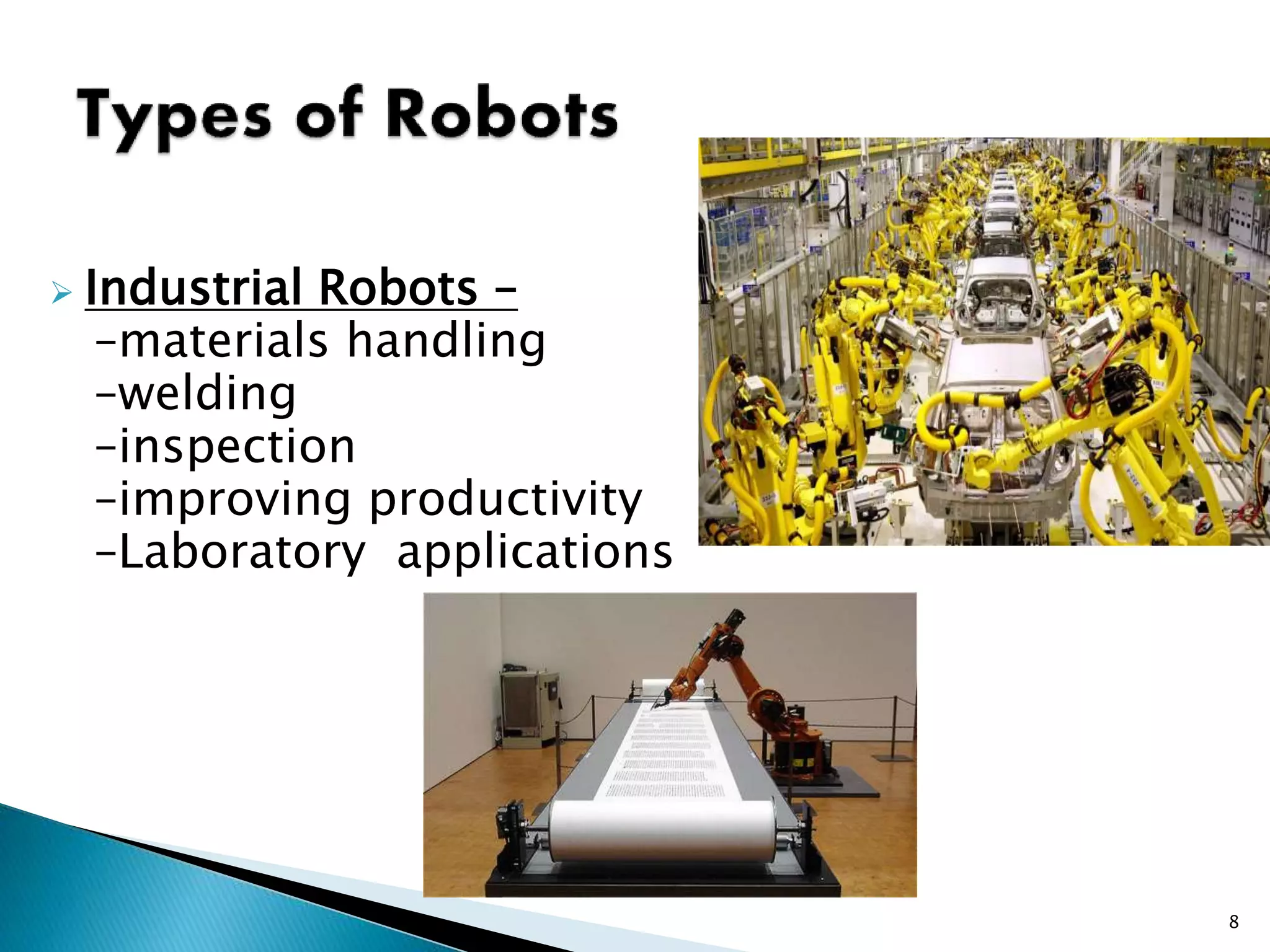
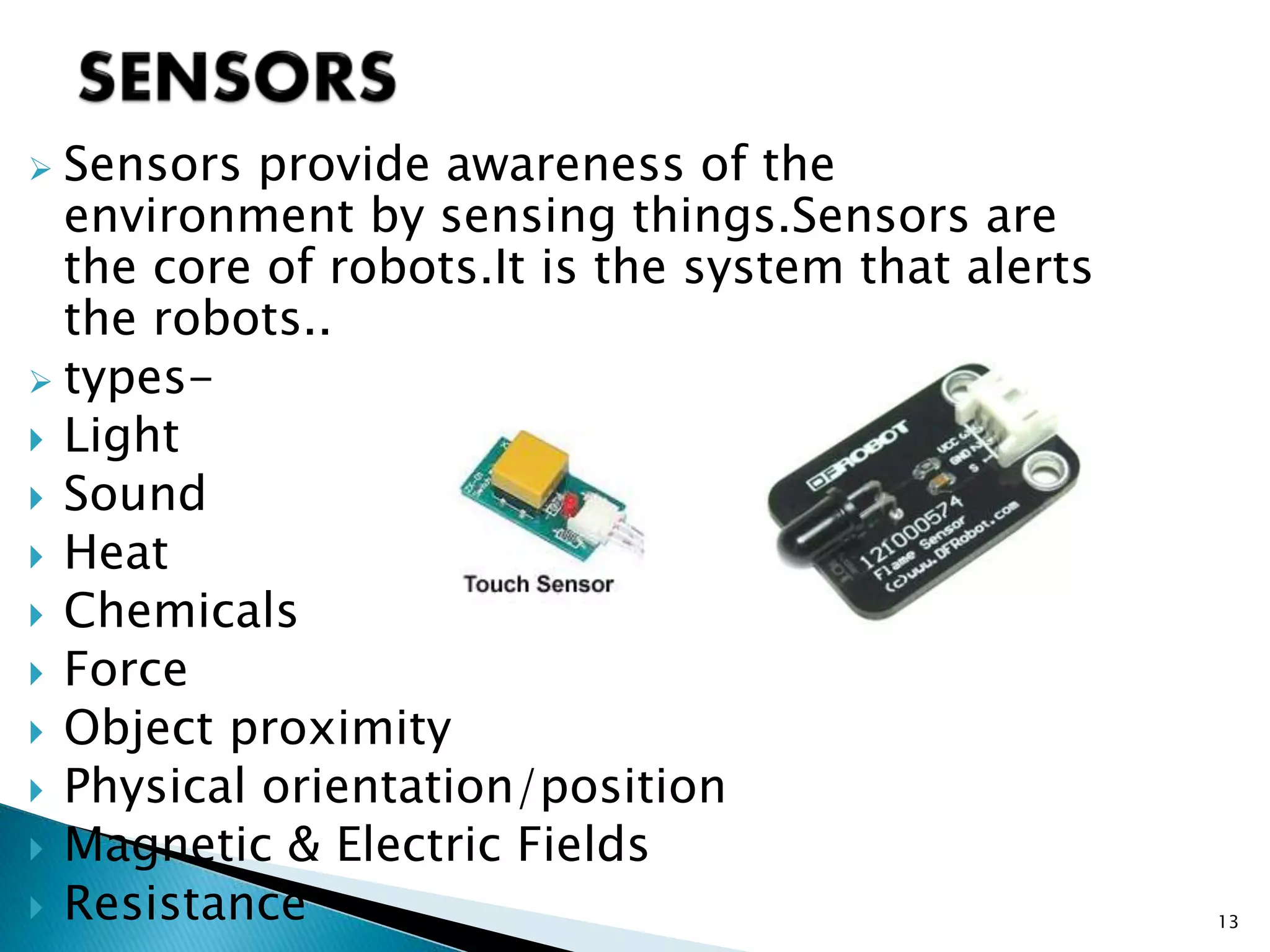
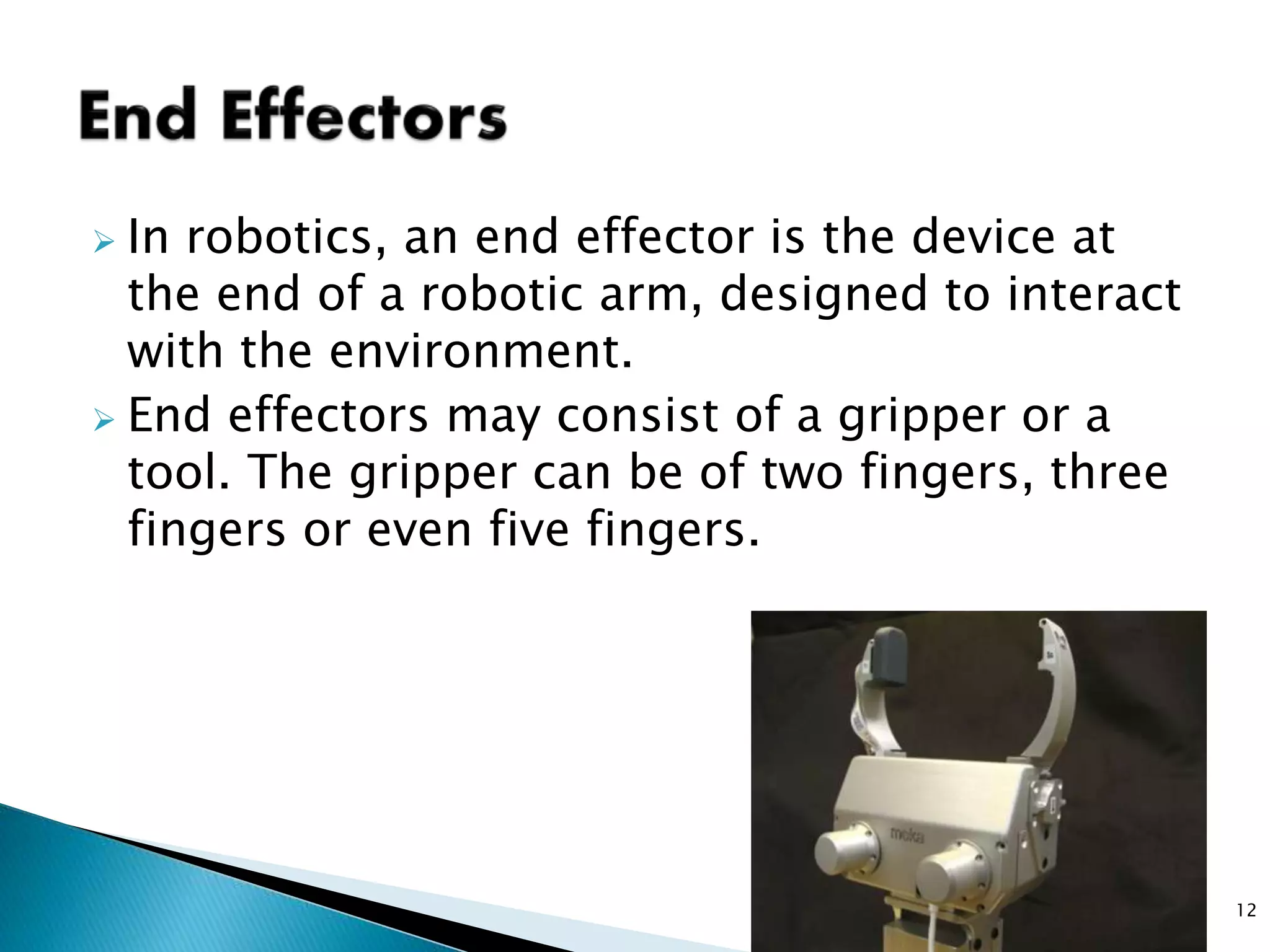
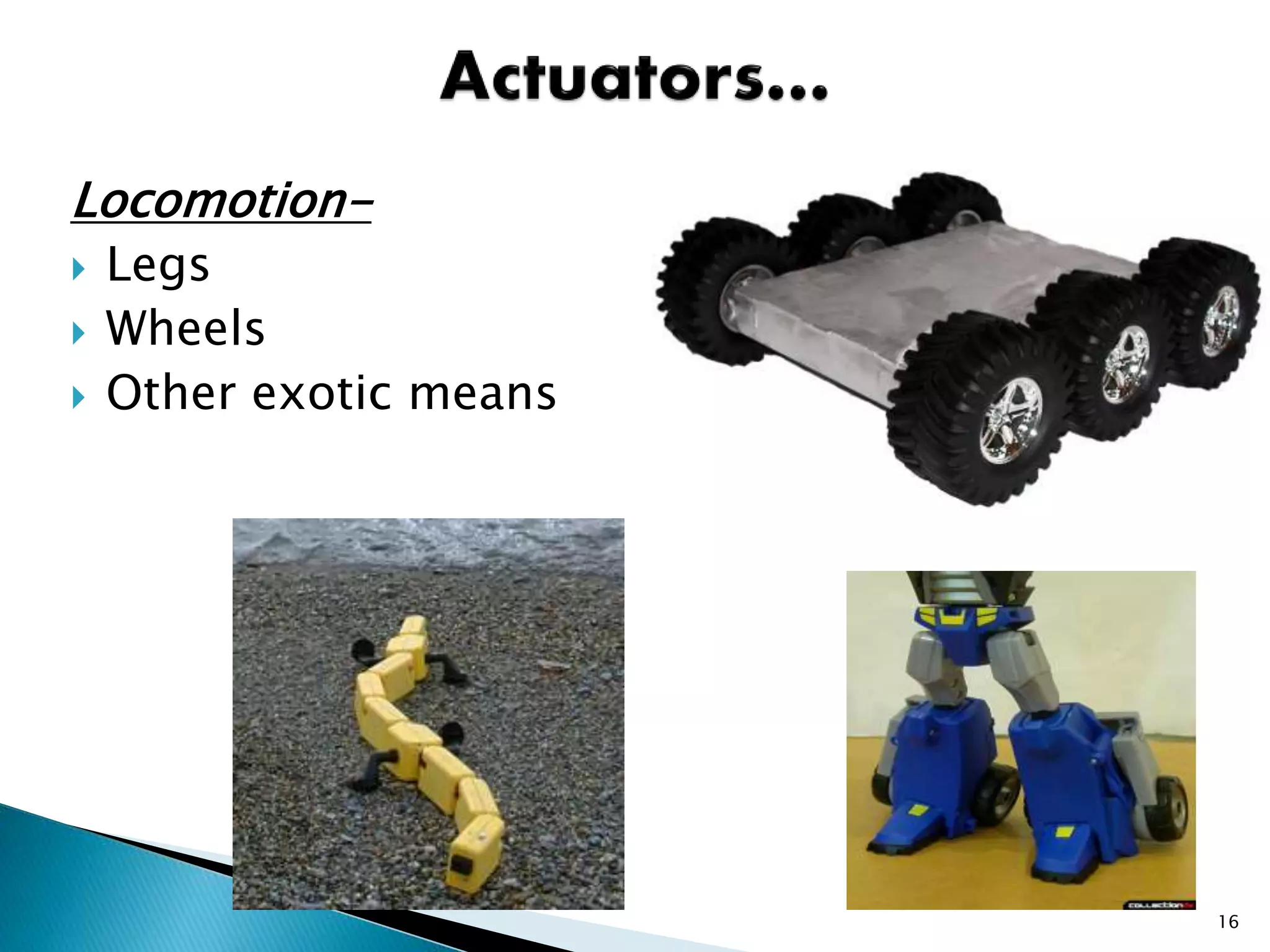
4. The main types and parts of robots, including industrial, mobile, educational, and domestic robots as well as their manipulators, end effectors, actuators, sensors, controllers and processors.