Downloaded 11 times
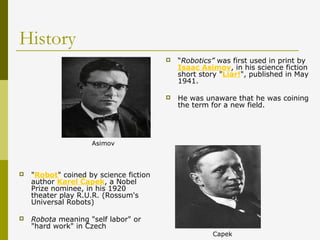
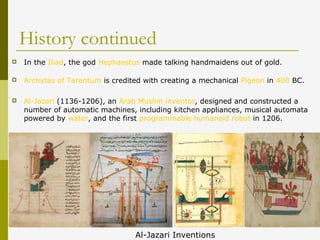
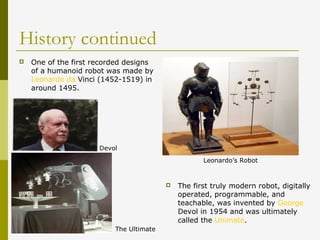
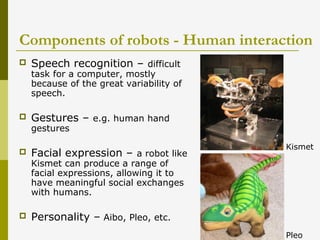


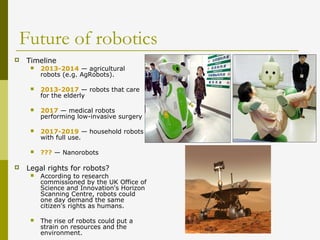


Robotics is the science and technology of robots, their design, manufacture, and application. The term "robot" was coined in a 1920 play and was first used in print in a 1941 science fiction story. Historically, robots have evolved from mechanical creations in ancient times to modern digitally operated programmable robots. A robot typically has actuators, sensors, and software to sense its environment and manipulate things. Robots are used widely in manufacturing, military applications, space exploration, medicine, and other fields. While robots currently don't pose threats, some fears exist about future highly intelligent robots that may develop their own goals. The future of robotics is predicted to include household robots and medical robots performing surgery.














































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)


