Downloaded 13 times

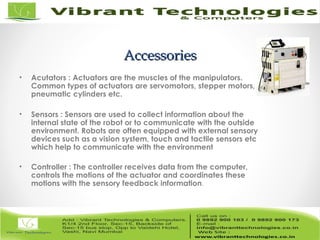
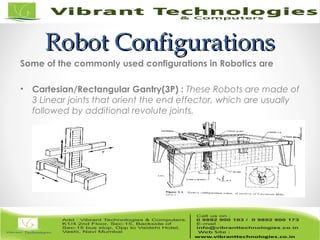
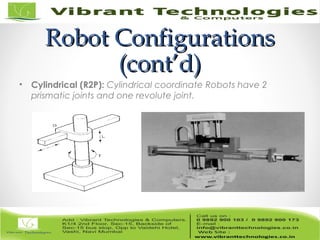
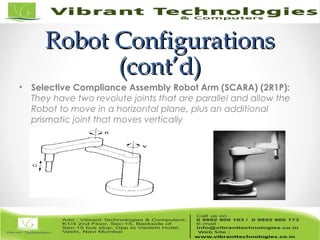
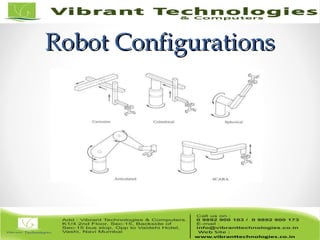
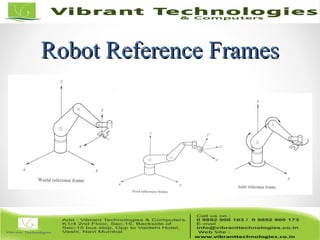
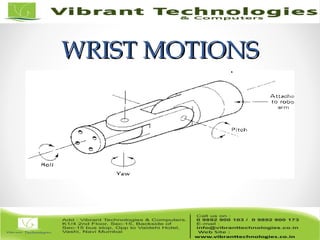


This document provides an introduction and overview of robotics. It discusses the timeline of robotics development. It describes different types of robots based on their classification and configuration. It also covers robot components like manipulators, end effectors, actuators, sensors, and controllers. The document discusses robot programming methods, reference frames, work envelopes, and control methods.