Downloaded 1,455 times
![Introduction to Robotics Sookram Sobhan, Polytechnic University [email_address]](https://image.slidesharecdn.com/introductiontoroboticsa-111128201304-phpapp02/85/Introductionto-robotics-a-1-320.jpg)
![Introduction to Robotics Sookram Sobhan, Polytechnic University [email_address]](https://image.slidesharecdn.com/introductiontoroboticsa-111128201304-phpapp02/75/Introductionto-robotics-a-1-2048.jpg)

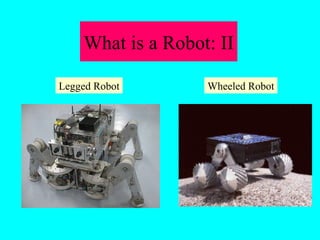
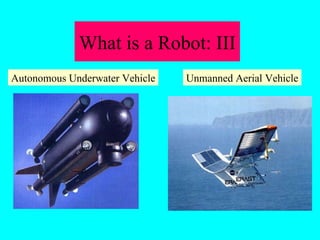
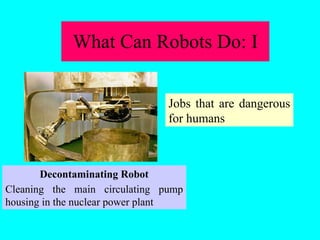
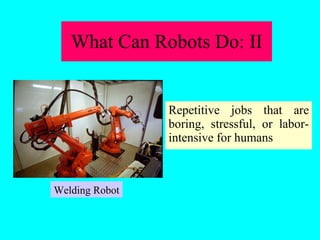
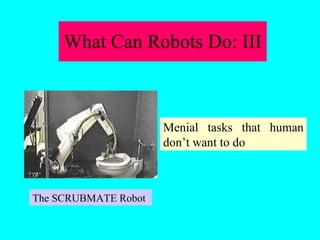
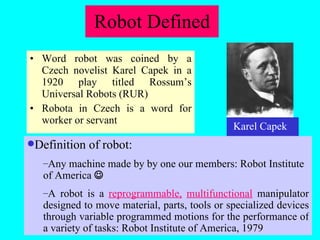
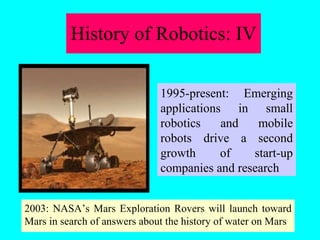
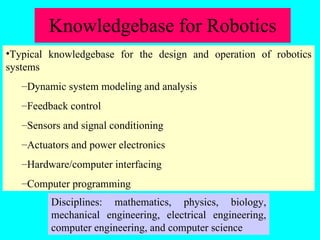
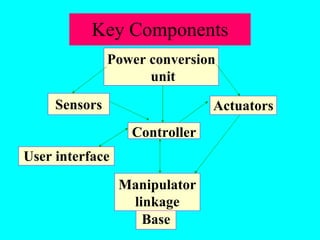

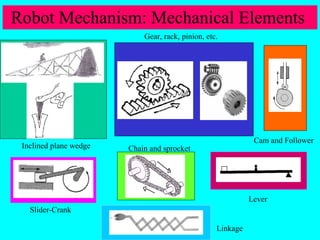



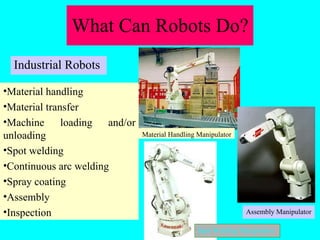
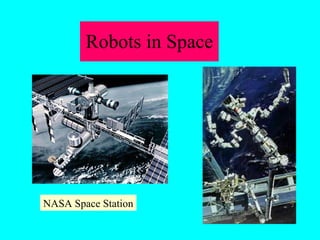
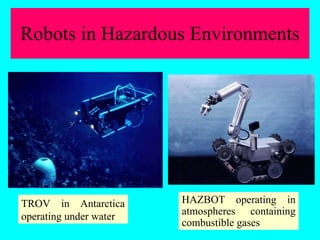
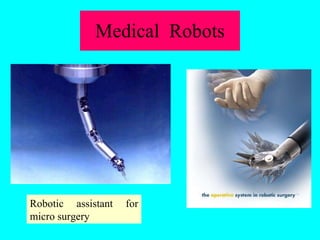
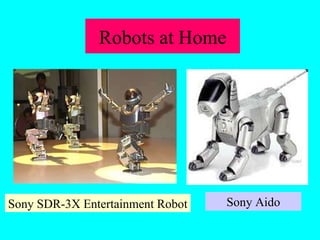
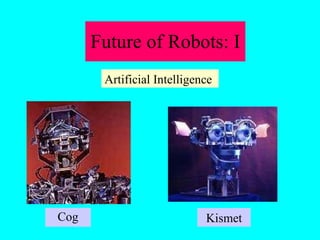

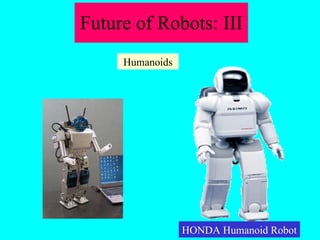


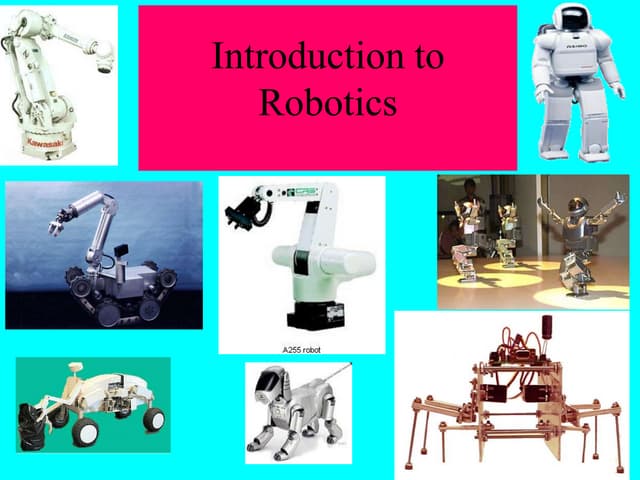
This document provides an introduction and overview of robotics. It discusses what robots are, including different types of robots like manipulators, wheeled robots, and aerial vehicles. It outlines what tasks robots can perform, such as dangerous, repetitive, or menial jobs. The document also covers the history of robotics, key robot components, applications in different industries, and the future of robotics, including areas like artificial intelligence and humanoids.