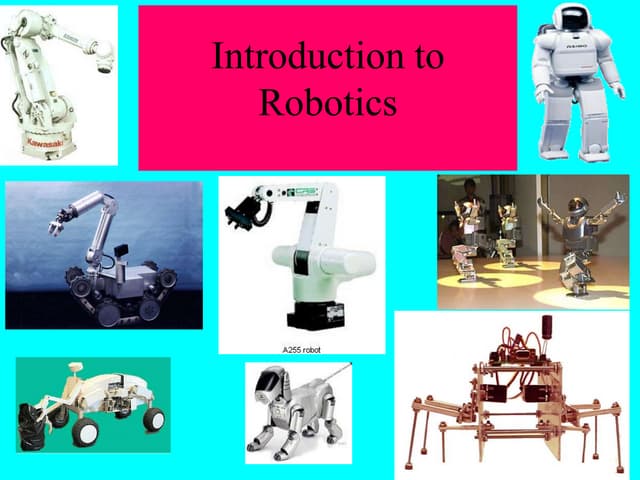
The document summarizes information about robotics including types of robots like manipulators, mobile robots, and humanoid robots. It discusses sensors used in robots such as light, proximity, sound, temperature, and acceleration sensors. It also provides an introduction to humanoid robots, describing their history, sensors, working, challenges, and examples like ASIMO, PETMAN, NAO, ATLAS, and ICUB.
![VEMU INSTITUTE OF TECHNOLOGY
TOPIC:Robotics
submitted by
C.Uday kumar
154M1A0417[ECE]
1](https://image.slidesharecdn.com/roboticsppt-191111134321/75/Robotics-ppt-1-2048.jpg)