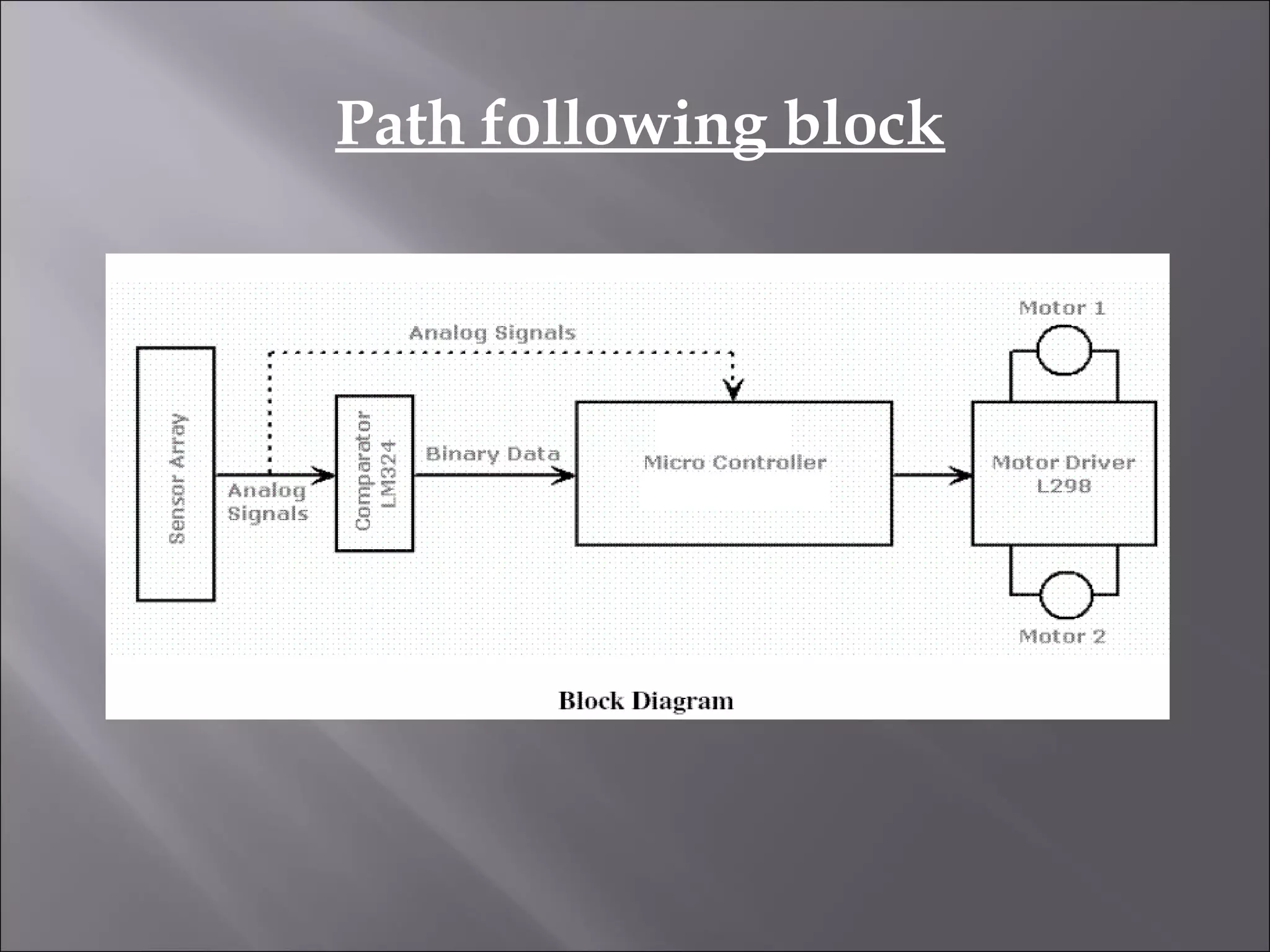
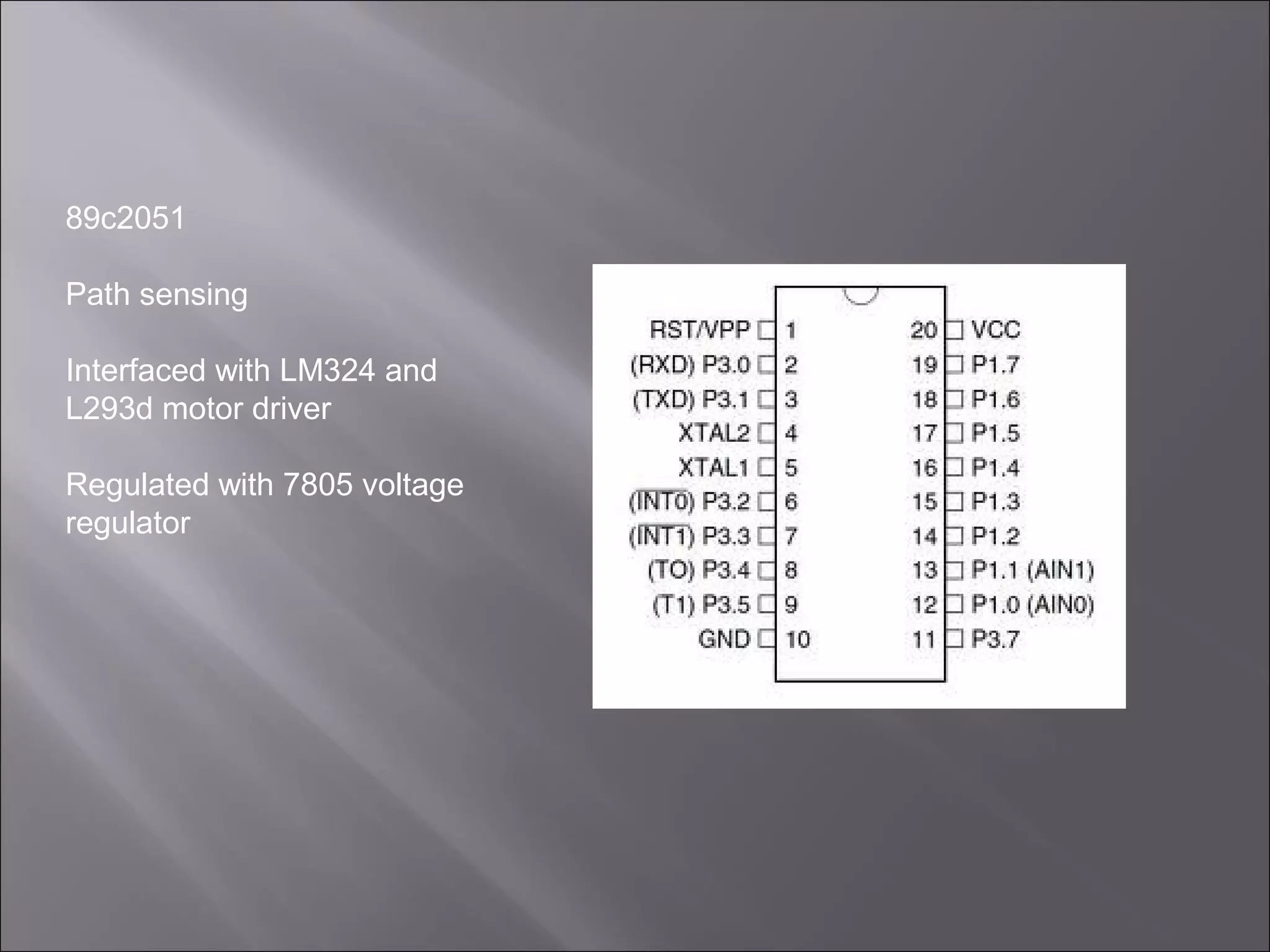
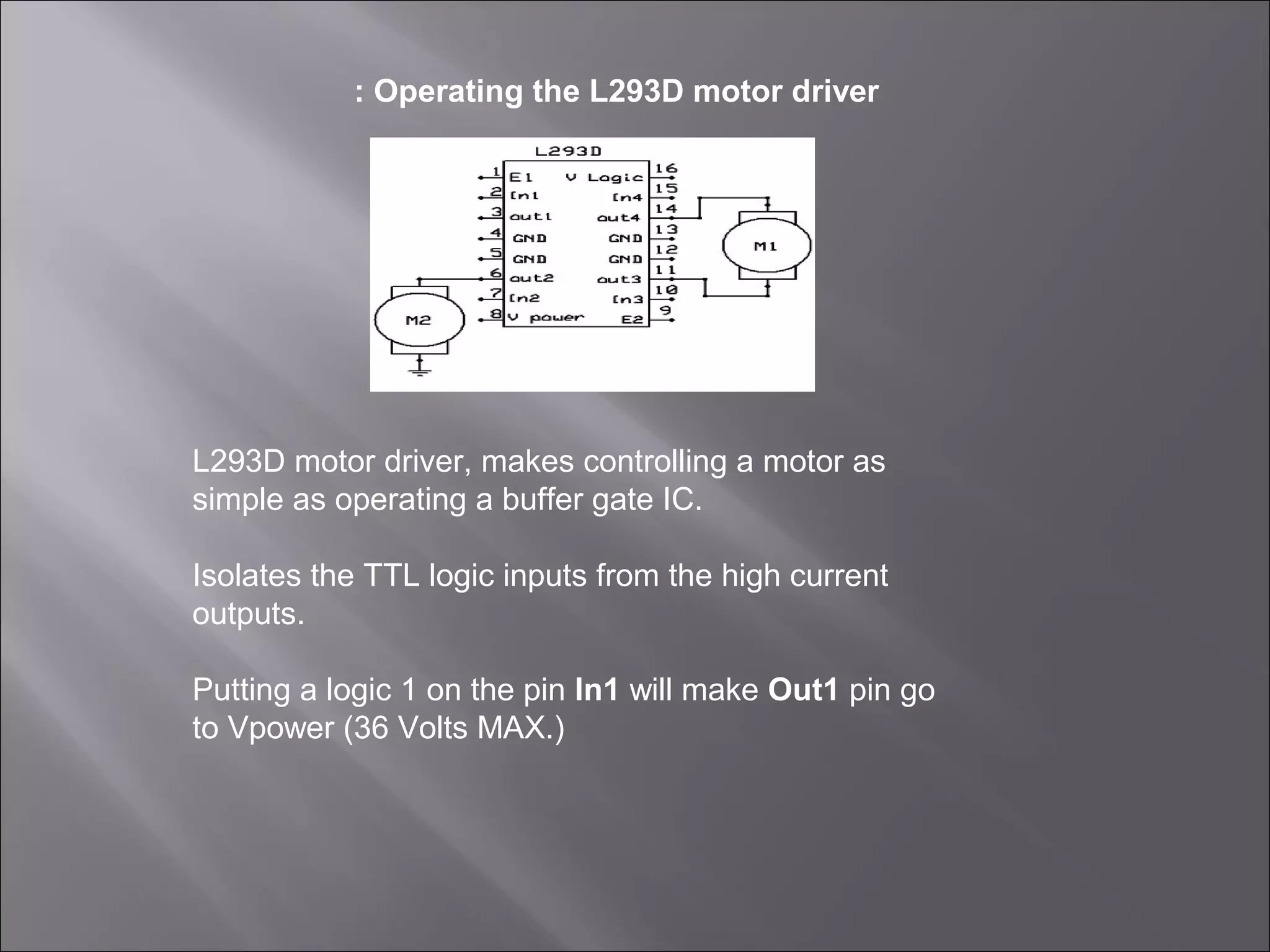
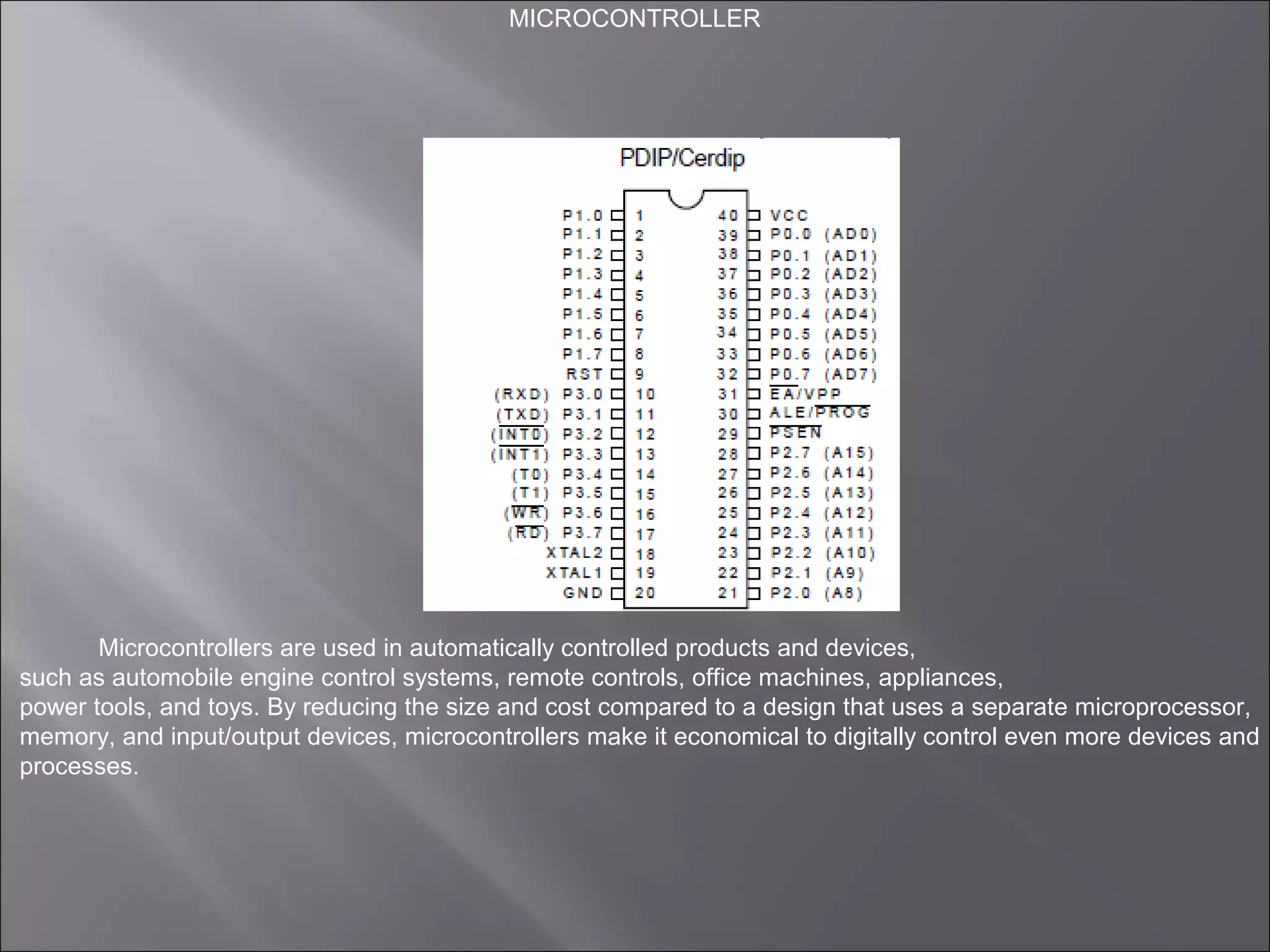
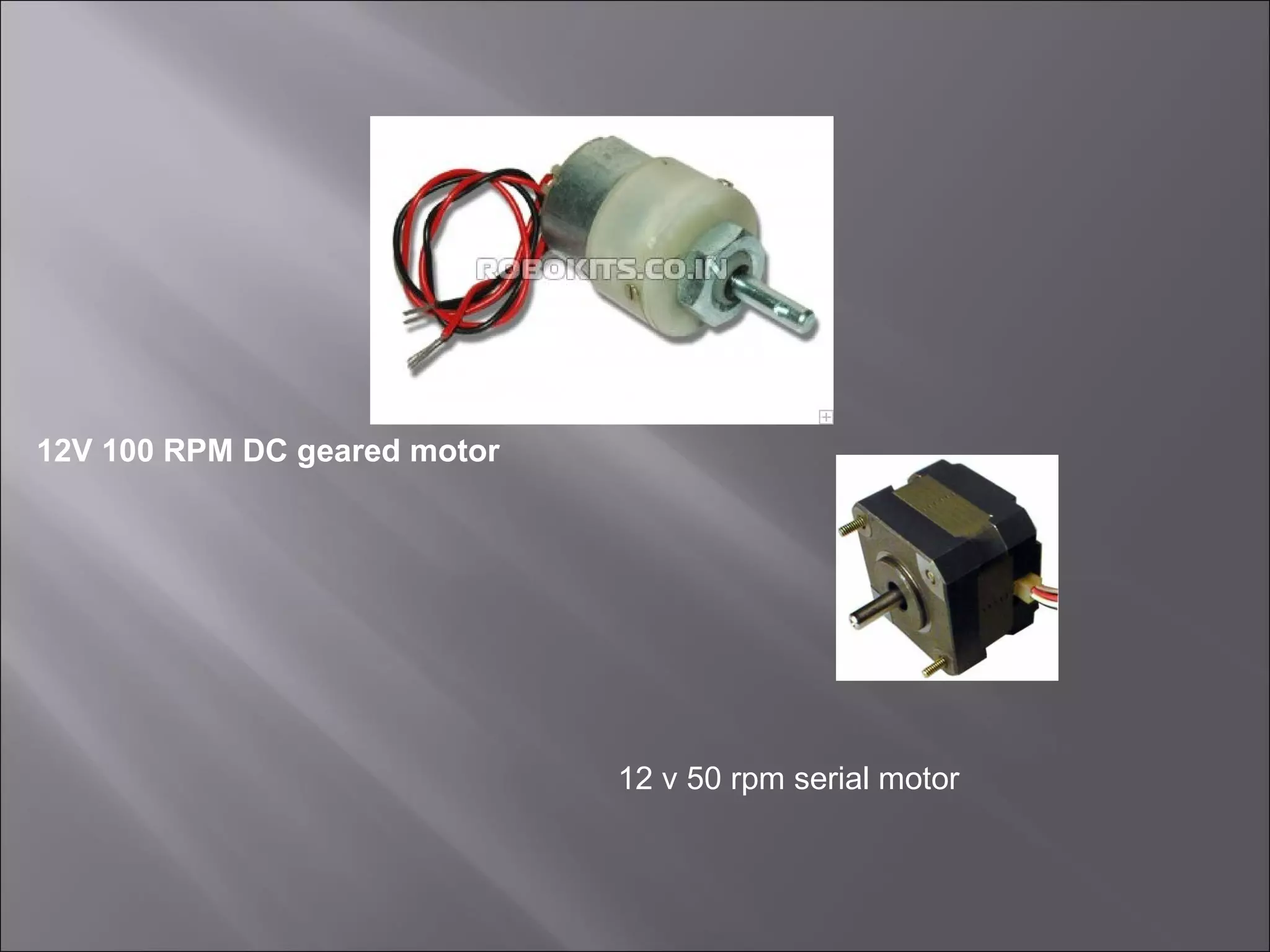
This document summarizes a project on Agrobot undertaken by students at Yeshwantrao Chavan College of Engineering under the guidance of Mr. Amit Tripathi. The project aims to develop a robot that can help with various agricultural activities like seed sowing, fertilizer spraying, and weed removal to increase efficiency and sustainability. The robot will use an 89c2051 microcontroller, path sensing circuits, motors controlled via an L293D driver. It is meant to work across different weather conditions and navigate around obstacles in the field. Agricultural robots have applications in tasks like sheep shearing, field sowing, fruit picking and more.

















































![[Webinar] Il telerilevamento da droni aerei: La normativa italiana ENAC e il ...](https://cdn.slidesharecdn.com/ss_thumbnails/webinardroniassorpaspresentazione27gennaio2015-150128100431-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)



















