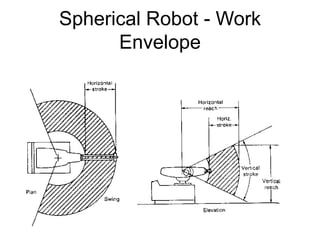
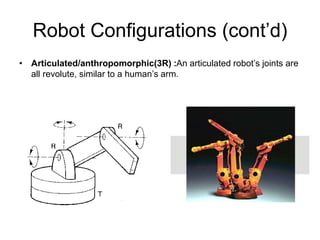
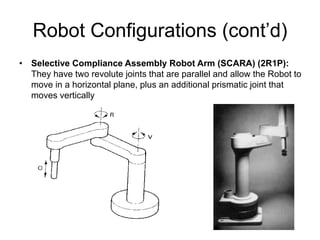
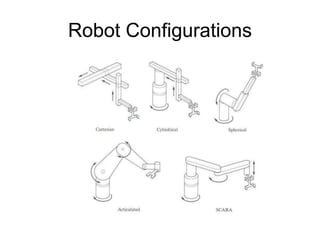
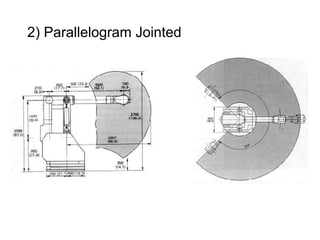
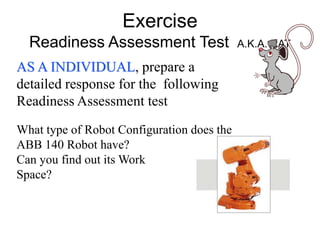
The document provides an introduction to robotics, including classifications of different robot types, common robot components and accessories, different robot configurations and their work envelopes, reference frames used for robot motion, and overview of robot programming methods including teach pendants and programming languages. It also discusses industrial applications of robots in manufacturing.