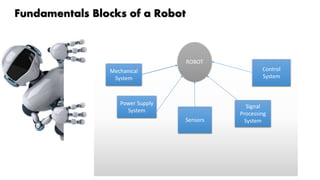
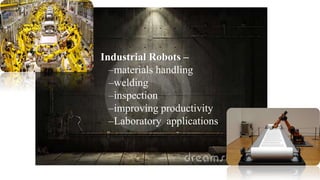
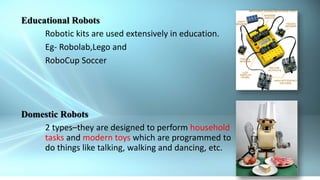
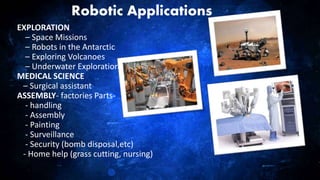
Robotic technology has evolved from early concepts of robots in literature to modern applications. Robots are programmable machines designed to perform tasks automatically. They consist of mechanical parts, sensors to perceive the environment, processors to make decisions, and effectors to manipulate objects. Key events included the coining of the term "robot" in 1920 and "robotics" in the 1940s. Isaac Asimov proposed three laws of robotics to ensure robots do not harm humans. Modern robots are used for industrial manufacturing, medical procedures, space exploration, military applications, and more. They allow tasks to be performed quickly, consistently and in hazardous environments.