The document discusses Gauss-Seidel, Successive Over Relaxation (SOR), and block SOR methods for solving systems of linear equations. Gauss-Seidel converges faster than Jacobi iteration. SOR can further accelerate convergence by introducing a relaxation parameter ω between 0 and 2. Block SOR generalizes the approach to block-structured matrices by solving blocks simultaneously. Examples show how to apply these methods to finite difference discretizations in 2D and 3D.

![2
Most applications are sparse (many aij = 0). Gauss-Seidel would not be used on
dense matrices because of the number of calculations required for the lower and upper
sums.
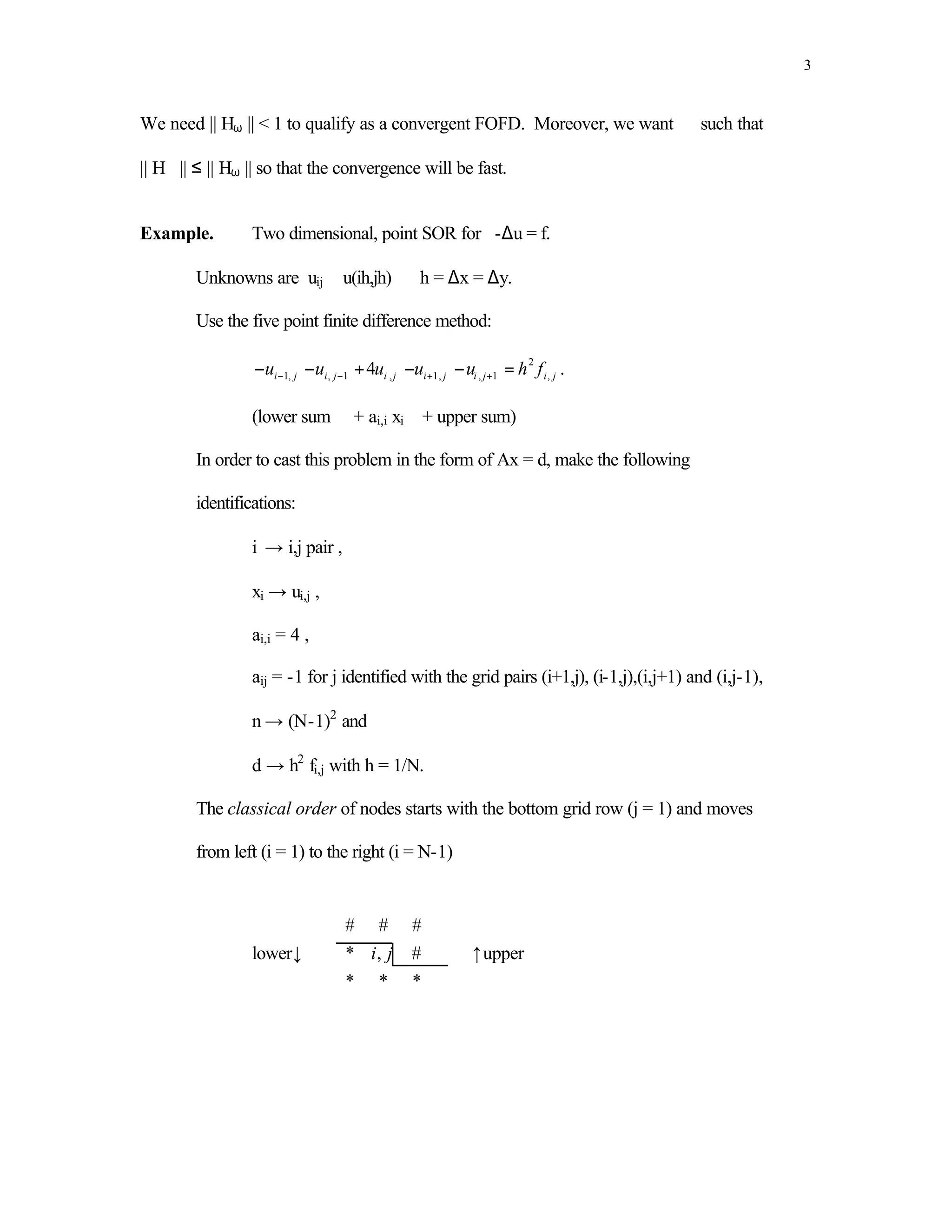
Notes: (i) If A SPD and 0 < ω < 2, then we will show that SOR converges.
(ii) ω > 1.0 is used to significantly accelerate convergence
(The choice of ω could be a problem for some application).
(iii) ω =1.0 (for G-S) is much faster than Jacobi.
SOR may be viewed as a matrix FOFD iteration
* 0 0 0 0 0 0 0 0 * * *
0 * 0 0 * 0 0 0 0 0 * *
A = D − L −U = − −
0 0 * 0 * * 0 0 0 0 0 *
0 0 0 * * * * 0 0 0 0 0
Then xim +1 = (1 − ω ) xim + ω (di − ∑ ai , j x m +1 −∑ ai , j x m ) / ai ,i
j j
j <i j >i
a x m +1
i, i i = (1 − ω )a x + ω (di − ∑ ai , j x m +1 −∑ ai , j x m )
m
i, i i j j
j <i j >i
The matrix form is
Dx m +1 = (1− ω ) Dx m + ω (d + Lxm +1 + Ux m )
( D − ω L) x m +1 = (1 − ω ) Dx m + ωUx m + ω d
( D − ω L ) x m +1 / ω = (1 − ω) Dx m / ω + Ux m + d
x m +1 = [( D − ω L) / ω] −1[(1 − ω ) D / ω + U ] x m + [( D − ω L) / ω ]−1 d
x m +1 = Hω x m + [( D − ω L ) / ω ]−1 d](https://image.slidesharecdn.com/gaussseidelsor-100720173110-phpapp01/75/Gaussseidelsor-2-2048.jpg)
![4
Point SOR with u(i,j) Overwritten.
for m = 0, maxm
numi = 0
for j = 1, N-1
for i = 1, N-1
utemp = [h*h*fij +u(i-1,j)+u(i,j-1)+u(i+1,j)+u(i,j+1)]*0.25
utemp = (1-ω)*u(i,j) + ω*utemp
error = u(i,j) - utemp
if abs(error) < ε numi = numi + 1
u(i,j) = utemp
if numi = (N-1)*(N-1) break
See MA402 chapters 3,4 for MATLAB and Fortran 90 implementations.
Example. Two dimensional block SOR.
B −I U1 F1
A = −I U = h2 F
B −I 2 2
−I B U 3
F3
4 −1 u11
−1 4 −1 ,
B = U1 = u21 ,
I3x3
−1 4
u31
−U i −1 + BU i − U i +1 = h 2 Fi .
Here i represents the i grid row (an abuse of notation)
Block component form iss A = [Aij] where A is (N-1)x(N-1) block matrix.](https://image.slidesharecdn.com/gaussseidelsor-100720173110-phpapp01/75/Gaussseidelsor-4-2048.jpg)