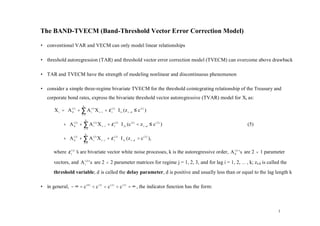
The document summarizes two models:
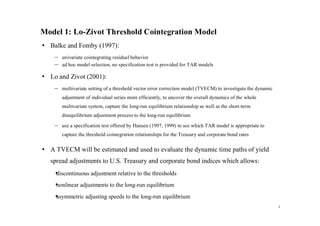
1. The Lo-Zivot Threshold Cointegration Model, which uses a threshold vector error correction model (TVECM) to analyze the dynamic adjustment of cointegrated time series variables to their long-run equilibrium. It allows for nonlinear and asymmetric adjustment speeds.
2. A bivariate vector error correction model (VECM) and band-threshold vector error correction model (BAND-TVECM) that extend the VECM to allow for nonlinear and discontinuous adjustments to long-run equilibrium across multiple regimes defined by thresholds on a variable. This captures asymmetric adjustment speeds and dynamic behavior.
The BAND-TVECM allows modeling of


![ γ 1( j) γ ( j) − β 2 γ 1( j)
where γ ( j)
β '= Π ( j)
( j) (1,− β 2 ) = 1( j)
= γ , and j = 1, 2, 3 (9)
γ 2
2 − β 2 γ 2( j)
• note that although the three regimes share a common cointegrating vector β ' = (1, − β 2 ) , the speeds of adjustment
γ ( j) ' = (γ 1( j) , γ 2( j) ) are regime specific. For example, we may observe that γ 1(1) ≠ γ 1( 3) or γ 2( 2 ) ≠ γ 2( 3)
• the simplest form for the TVECM occurs when k = 1 in equation (8) so that all lag difference terms drop out of the
equation, the cointegrating residual β ' X t follows a regime specific AR(1) process or threshold autoregressive (TAR)
process:
β ' X t = δ ( j) + ρ ( j) β ' X t −1 + η t( j) ,
with ρ ( j) = 1 + β ' γ ( j) = 1 + γ 1( j) − β 2 γ 2( j) , where δ ( j) = β ' A (0j) and η t( j) = β ' ε t( j)
Proof:
Set k = 1 in equation (8) to obtain:
∆X t = X t − X t −1 = [A (01) + γ (1)
β ' X t −1 ]I 1t (z t − d ≤ c (1) ) + [A (02 ) + γ ( 2) β ' X t −1 ]I 2 t (c (1) < z t − d ≤ c ( 2 ) )
+ [A (03) + γ ( 3 ) β ' X t −1 ]I 3 t (z t − d > c ( 2 ) ) + ε t .
Multiply both sides by β ' , then move β ' Xt-1 to the right-hand side, will obtain:
β ' X t = β ' X t −1 + [β ' A (01) + β ' γ (1) β ' X t −1 ]I 1t ( z t −d ≤ c (1) ) + [β ' A (02 ) + β ' γ ( 2 ) β ' X t −1 ]I 2 t (c (1) < z t −d ≤ c ( 2 ) )
+ [β ' A (03 ) + β ' γ (3 ) β ' X t −1 ]I 3 t ( z t −d > c ( 2 ) ) + β ' ε t .
5](https://image.slidesharecdn.com/2003amesmodels-13205413335934-phpapp02-111105201117-phpapp02/85/2003-Ames-Models-5-320.jpg)
![Split β ' X t −1 and ε t to each regime, then obtain:
β ' X t = [β ' A (01) + β ' X t −1 + β ' γ (1) β ' X t −1 + β ' ε t(1) ]I1t (z t − d ≤ c(1) )
+ [β ' A (02 ) + β ' X t −1 + β ' γ ( 2 ) β ' X t −1 + β ' ε t( 2 ) ]I 2 t (c(1) < z t − d ≤ c ( 2 ) )
+ [β ' A (03 ) + β ' X t −1 + β ' γ ( 3) β ' X t −1 + β ' ε t(3 ) ]I3 t ( z t − d > c ( 2 ) ).
Collect terms to get:
β ' X t = [β ' A (01) + (1 + β ' γ (1) ) β ' X t −1 + β ' ε t(1) ]I1t ( z t − d ≤ c (1) )
+ [β ' A (02 ) + (1 + β ' γ ( 2 ) ) β ' X t −1 + β ' ε t( 2 ) ]I 2 t (c (1) < z t − d ≤ c( 2 ) )
+ [β ' A (03 ) + (1 + β ' γ ( 3) ) β ' X t −1 + β ' ε t( 3) ]I3 t (z t − d > c( 2 ) )
= δ ( j) + ρ ( j ) β ' X t −1 + η t( j ) .
Q.E.D.
• β ' X t is stable within each regime if the stability condition ρ ( j) = 1 + γ 1( j) − β 2 γ 2( j) < 1 holds for each regime
• in equation (8), with k = 1, then we have:
∆X t = [A (01) + γ (1) β ' X t −1 ]I 1t (z t − d ≤ c (1) ) + [A (02 ) + γ ( 2)
β ' X t −1 ]I 2 t (c (1) < z t − d ≤ c ( 2) )
(10)
+ [A (03 ) + γ ( 3 ) β ' X t −1 ]I 3 t (z t − d > c ( 2 ) ) + ε t .
• it is easier to capture the long-run equilibrium relationship if we rewrite (10) in:
∆X t = γ (1) [β ' X t −1 − µ (1) ]I 1t ( z t − d ≤ c (1) ) + γ ( 2 ) [β ' X t −1 − µ ( 2) ]I 2 t (c (1) < z t − d ≤ c ( 2 ) )
(11)
+ γ ( 3) [β ' X t −1 − µ ( 3) ]I 3t (z t − d > c ( 2) ) + ε t .
explicitly we have:
6](https://image.slidesharecdn.com/2003amesmodels-13205413335934-phpapp02-111105201117-phpapp02/85/2003-Ames-Models-6-320.jpg)
![γ 1(1) [x 1t −1 − β 2 x 2 t −1 − µ (1) ] + ε 1(t1) , if z t − d ≤ c (1) ,
∆x 1t = γ 1( 2 ) [x 1t −1 − β 2 x 2 t −1 − µ ( 2 ) ] + ε 1(t2 ) , if c (1) < z t − d ≤ c ( 2 ) , and
γ ( 3 ) [x − β x − µ ( 3) ] + ε 1(t3 ) , if z t − d > c ( 2 ) ,
1 1t −1 2 2 t −1
γ 2(1) [x 1t −1 − β 2 x 2 t −1 − µ (1) ] + ε 2(1t ) , if z t − d ≤ c (1) ,
∆x 2 t = γ 2( 2 ) [x 1t −1 − β 2 x 2 t −1 − µ ( 2 ) ] + ε 2( 2 ) ,
t
if c (1) < z t − d ≤ c ( 2 ) ,
γ ( 3 ) [x − β x − µ ]+ ε 2 t ,
( 3) (3)
if z t − d > c ( 2 ) .
2 1t −1 2 2 t −1
• the magnitudes and signs of the γ’ will provide fruitful information regarding the equilibrium relationships
s
• equation (11) offers the regime-specific means µ ( j) , which is calculated as:
β ' A (0j) A (0j,1 − β 2 A (0j,)2
)
δ ( j)
µ ( j)
=− = − ( j) = , (12)
β ' γ ( j) γ 1 − β 2 γ 2( j) 1 − ρ ( j)
where A (0j) ' = (A (0j,1 , A (0j,)2 ) , and β ' = (1, − β 2 )
)
• it is also possible to eliminate the regime specific drift in Xt through the restriction:
A (0j) = −γ ( j) µ ( j) (13)
where µ ( j) is calculated by (12)
• note that we may rewrite equation (11) as follows with z t −1 = β ' X t −1 = x 1t −1 − β 2 x 2 t −1 :
7](https://image.slidesharecdn.com/2003amesmodels-13205413335934-phpapp02-111105201117-phpapp02/85/2003-Ames-Models-7-320.jpg)
![γ (1)
[z t −1
− µ (1 ) ] + ε t , if z t −d ≤ c (1) ,
∆X t = γ (2)
[z t −1 − µ (2) ] + ε t , if c (1) < z t − d ≤ c ( 2 ) , (14)
γ
( 3)
[z t −1
− µ ( 3) ] + ε t , if z t − d > c ( 2 ) .
• consider the case of d = 1, γ ( 2 ) = 0 and A (02 ) = 0 in equation (14), this is the Band-TVECM structure which is the most
popular form in threshold cointegrating applications:
γ (1) [z t −1 − µ (1) ] + ε t , if z t −1 ≤ c (1) ,
∆X t = ε t , if c (1) < z t −1 ≤ c ( 2 ) , (15)
γ ( 3 ) [z − µ ( 3 ) ] + ε , if z t −1 > c ( 2 ) .
t −1 t
• the stability conditions must hold for the outer regimes, i.e., ρ ( j) = 1 + γ 1( j) − β 2 γ 2( j) < 1, for j = 1 and 3
• one may interpret above model as:
1. if the cointegrating residual (the error-correction term) z t −1 = β ' X t −1 lies within the inner band [c (1) , c ( 2 ) ] , then Xt
behaves like a random walk process without the drift, i.e., ∆X t has no tendency reverting to any long-term
equilibrium
2. if z t −1 is less than c (1) , then z t reverts to the regime specific mean µ (1) with adjustment coefficient ρ (1) while ∆X t
adjusts with speed of adjustment vector γ (1)
8](https://image.slidesharecdn.com/2003amesmodels-13205413335934-phpapp02-111105201117-phpapp02/85/2003-Ames-Models-8-320.jpg)
![3. if z t −1 is greater than c ( 2 ) , then z t reverts to the regime specific mean µ ( 3) with adjustment coefficient ρ ( 3) and
∆X t adjusts with speed of adjustment vector γ ( 3 )
4. expect γ i( 3) ≤ 0, γ i(1) > 0, for i = 1, 2, because of the force of the error correcting toward the long-term equilibrium
• if the regime specific means of the cointegrating residual z t are equal to the nearby threshold values (it is called the
“continuous”model): µ (1) = c (1) , µ ( 3) = c ( 2 ) , then (15) may be written as:
γ (1) [z t −1 − c (1) ] + ε t , if z t −1 ≤ c (1) ,
∆X t = ε t , if c (1) < z t −1 ≤ c ( 2 ) , (16)
γ ( 3) [z − c ( 2 ) ] + ε , if z t −1 > c ( 2 ) .
t −1 t
• the “symmetric”threshold model arises when the threshold values are symmetric against the origin ( c ( 2 ) = −c(1) = c ):
γ (1) [z t −1 + c] + ε t , if z t −1 ≤ −c,
∆X t = ε t , if − c < z t −1 ≤ c, (17)
γ ( 3) [z − c] + ε , if z t −1 > c .
t −1 t
• if µ (1) = µ (3 ) = 0, then we have the EQ-TVECM:
γ (1) z t −1 + ε t , if z t −1 ≤ c (1) ,
∆X t = ε t , if c (1) < z t −1 ≤ c ( 2 ) , (18)
γ ( 3 ) z + ε , if z t −1 > c ( 2 ) .
t −1 t
9](https://image.slidesharecdn.com/2003amesmodels-13205413335934-phpapp02-111105201117-phpapp02/85/2003-Ames-Models-9-320.jpg)




![Two-Regime Threshold Cointegration Model
• xt is a p × 1 I(1) with one p × 1 cointegrating vector β, w t ( β ) = β ' x t denotes the I(0) error-correction term
• A linear vector error correction model (VECM) of order (L+1):
∆x t = A ' X t −1 ( β ) + u t , (1)
where X 't −1 ( β ) = [ 1, w t −1 ( β ), ∆x t −1 , ∆x t − 2 , ..., ∆x t − L ], with dimensions: Xt-1(β) is k × 1, k = p × L + 2, A is k ×
p
• The error term ut is a p × 1 Martingale difference sequence with finite variance-covariance matrix Σ = E(u t u 't ) of
dimension p × p
• The approach is to estimate the parameters (β, A, Σ) by maximum likelihood estimation given the assumption
that the error terms u t’ are i.i.d. Gaussian distributed
s
• Let γ be the threshold parameter, a two-regime threshold cointegration model:
A 1' X t −1 ( β ) + u t , if w t −1 ( β ) ≤ γ ,
∆x t = ' ,
A 2 X t −1 ( β ) + u t , if w t −1 ( β ) > γ ,
15](https://image.slidesharecdn.com/2003amesmodels-13205413335934-phpapp02-111105201117-phpapp02/85/2003-Ames-Models-15-320.jpg)







![Extensions to modify the basic threshold cointegration model:
(1) allow a non-zero drift term as the linear attractor, which can be expressed as:
∆µ t = I t ρ 1 ( µ t −1 − a 0 ) + (1 − I t ) ρ 2 ( µ t −1 − a 0 ) + ε t , (7)
where It is the Heaviside indicator function such that:
1, if µ t −1 ≥ a 0
It = (8)
0, if µ t −1 < a 0 .
(2) allow a drift and linear trend as attractor with the expression:
∆µ t = I t ρ 1 [ µ t −1 − a 0 − a 1 ( t − 1)] + (1 − I t ) ρ 2 [ µ t −1 − a 0 − a 1 ( t − 1)] + ε t , (9)
where It is the Heaviside indicator function such that:
1, if µ t −1 ≥ a 0 + a 1 ( t − 1)
It = (10)
0, if µ t −1 < a 0 + a 1 ( t − 1).
(3) involve higher-order terms of the error process to purge possible auto-correlation:
23](https://image.slidesharecdn.com/2003amesmodels-13205413335934-phpapp02-111105201117-phpapp02/85/2003-Ames-Models-23-320.jpg)


























![[Vvedensky d.] group_theory,_problems_and_solution(book_fi.org)](https://cdn.slidesharecdn.com/ss_thumbnails/vvedenskyd-grouptheoryproblemsandsolutionbookfi-org-130405071812-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)