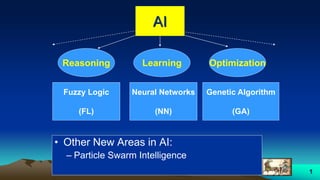
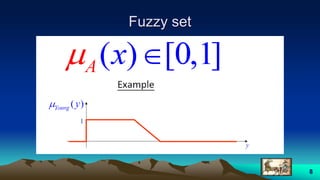
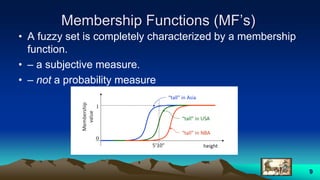
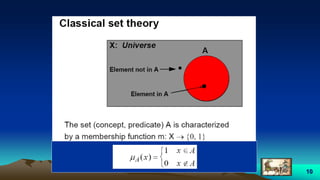
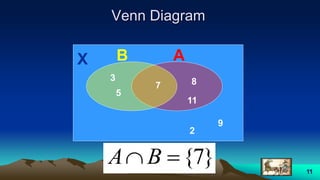
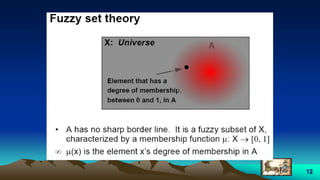
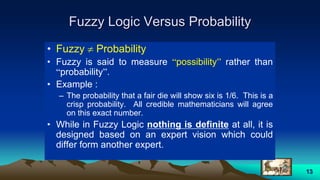
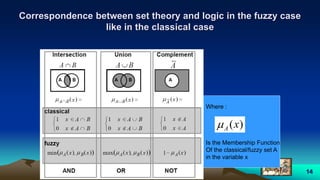
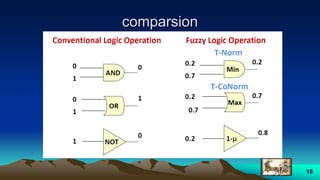
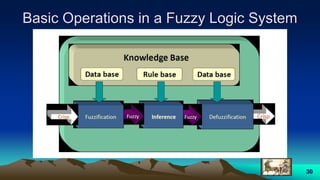
This document provides an overview of fuzzy logic, including its origins, key concepts, and applications. It discusses how fuzzy logic allows for approximate reasoning and decision making under uncertainty by using linguistic variables and fuzzy set theory. Membership functions are used to characterize fuzzy sets and assign degrees of truth between 0 and 1 rather than binary true/false values. Common fuzzy logic operations like intersection, union, and complement are also covered. Finally, some examples of fuzzy logic control systems are presented, including how they are designed using fuzzy rule bases and inference methods like Mamdani and Sugeno.


![42
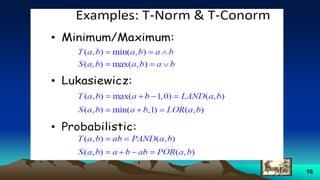
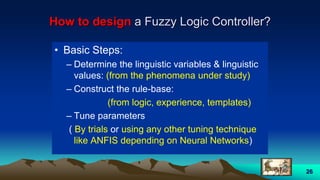
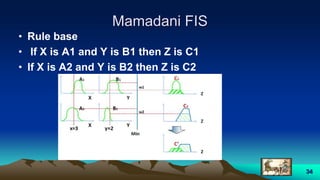
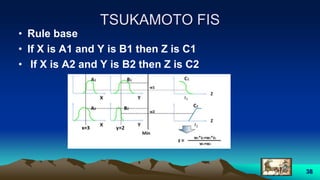
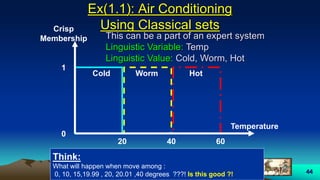
Example 1.2
Air Conditioning
• We have an air conditioned room, we want
to control the temperature of the room in
the range [0:60] degrees.
• Investigate this problem regarding classical
set theory and the fuzzy set theory.](https://image.slidesharecdn.com/fuzzylogic-170914064133/85/Fuzzy-logic-42-320.jpg)


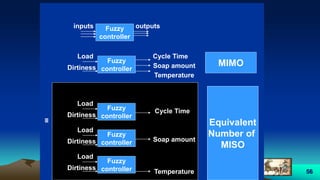
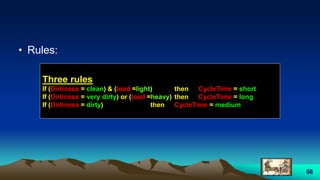
![57
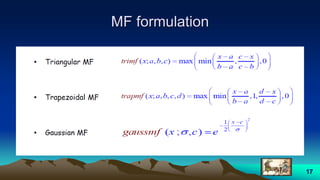
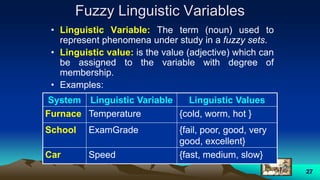
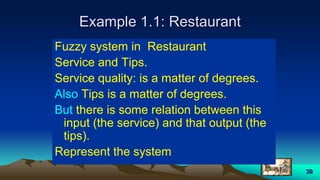
• MI (Multi-Input) :
1- Dirtiness:
range: [0 1]
MSF: Triangular (clean, dirty, very dirty)
2- load:
range: [0 1]
MSF: Triangular (light, medium, heavy)
• SO (single Output) :
1- Cycle Time:
range: [0 1]
MSF: Trapezoidal (short, medium , long)](https://image.slidesharecdn.com/fuzzylogic-170914064133/85/Fuzzy-logic-57-320.jpg)
![60
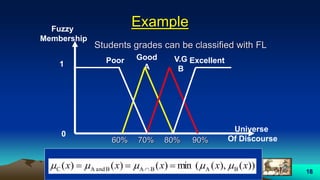
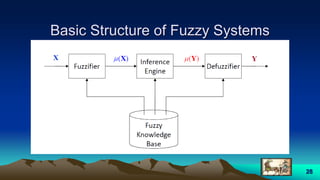
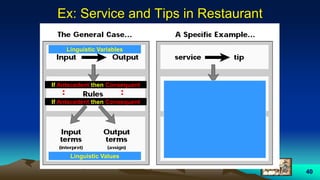
Matlab Demo
• g=readfis(‘wmachine.fis’);
• g=
• g.andMethod
• g.input
• g.input(1).name
• g.input(2).range
• g.input(1).mf
• g.rule
• Y=evalfis([0.3;0.9],g)](https://image.slidesharecdn.com/fuzzylogic-170914064133/85/Fuzzy-logic-60-320.jpg)
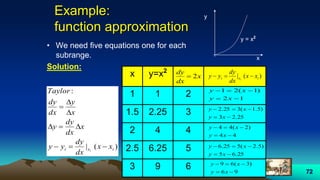
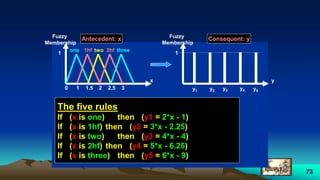
![71
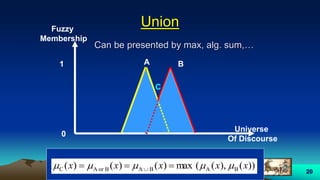
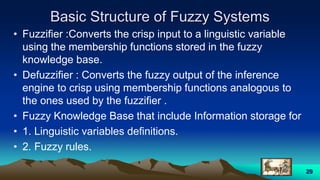
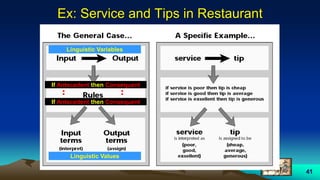
Example:
function approximation
• We want to approximate this
function in the range [1 3] using
fuzzy TSK model with five MSFs.
y = x2
y
x](https://image.slidesharecdn.com/fuzzylogic-170914064133/85/Fuzzy-logic-71-320.jpg)