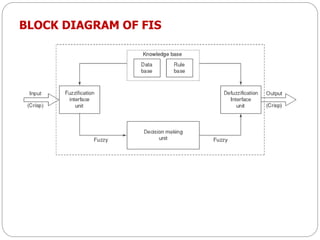
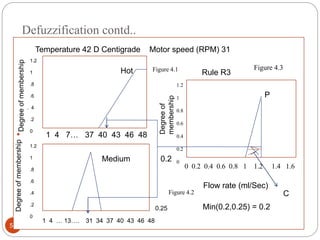
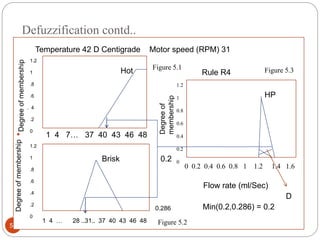
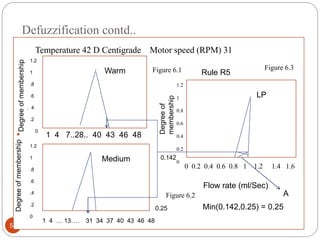
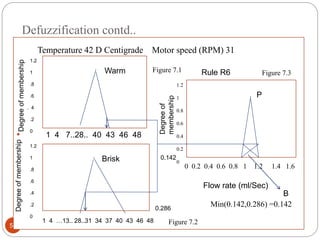
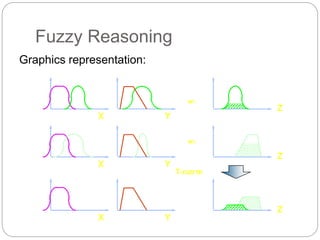
The document discusses fuzzy rule-based systems and fuzzy reasoning. It defines fuzzy if-then rules which have antecedents and consequents that are fuzzy sets rather than binary variables. Fuzzy reasoning can involve single or multiple rules with single or multiple antecedents. Graphical representations are used to illustrate the fuzzy reasoning process. The types of fuzzy inference systems including Mamdani and Sugeno systems are described along with their components and working. Applications of fuzzy logic in various domains are also mentioned.

![FUZZY RULE FORMATION
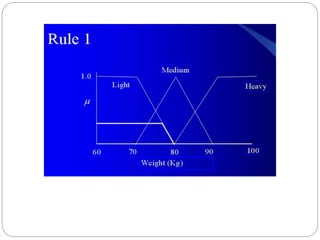
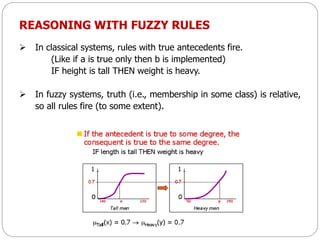
IF height is tall
THEN weight is heavy.
Here the fuzzy classes height and weight have a
given range (i.e., the universe of discourse).
range (height) = [140, 220]
range (weight) = [50, 250]](https://image.slidesharecdn.com/fuzzylogicsecond-200808062700/85/Fuzzylogic-12-320.jpg)