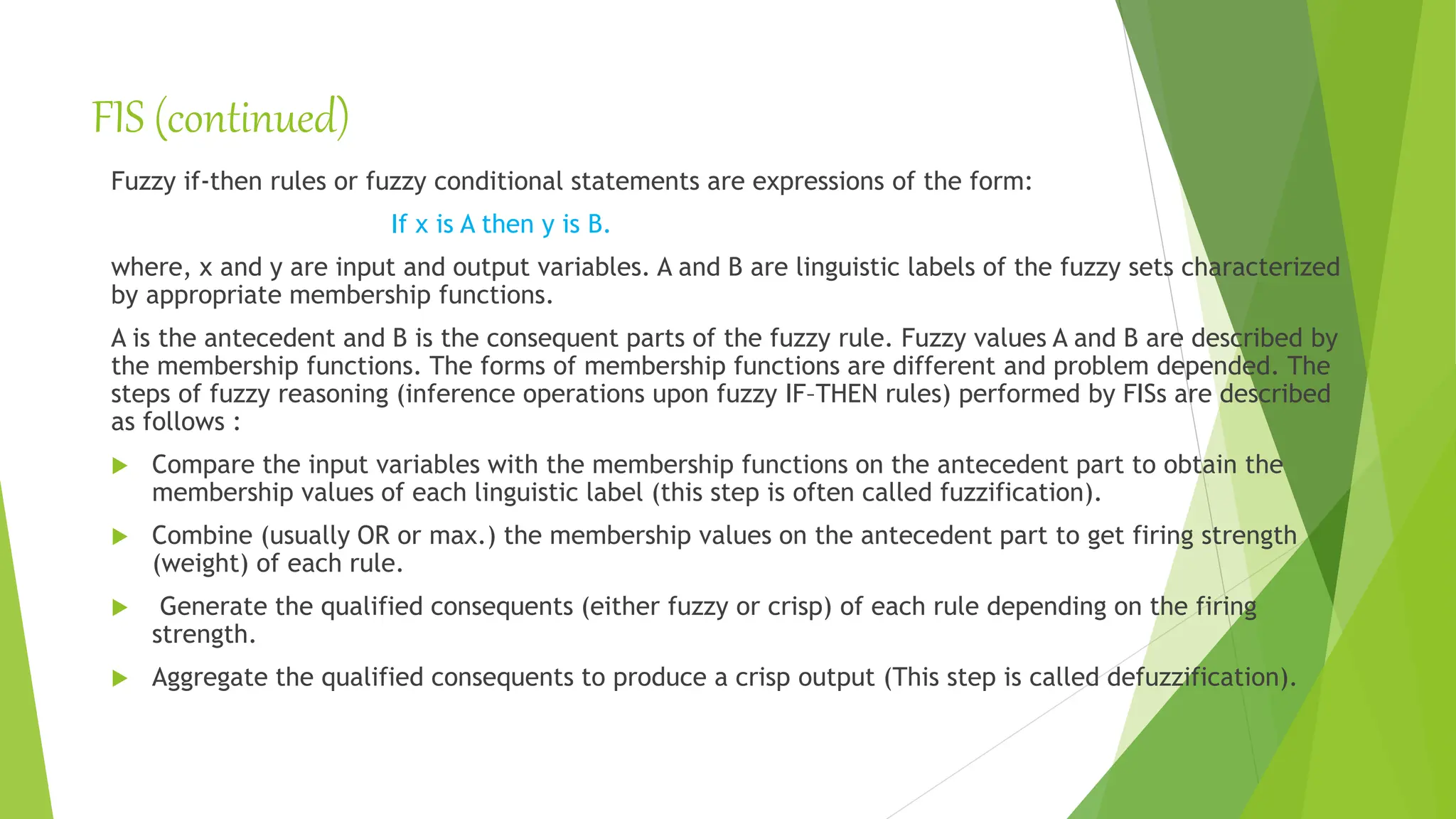
This document describes fuzzy logic controllers and their components. It discusses:
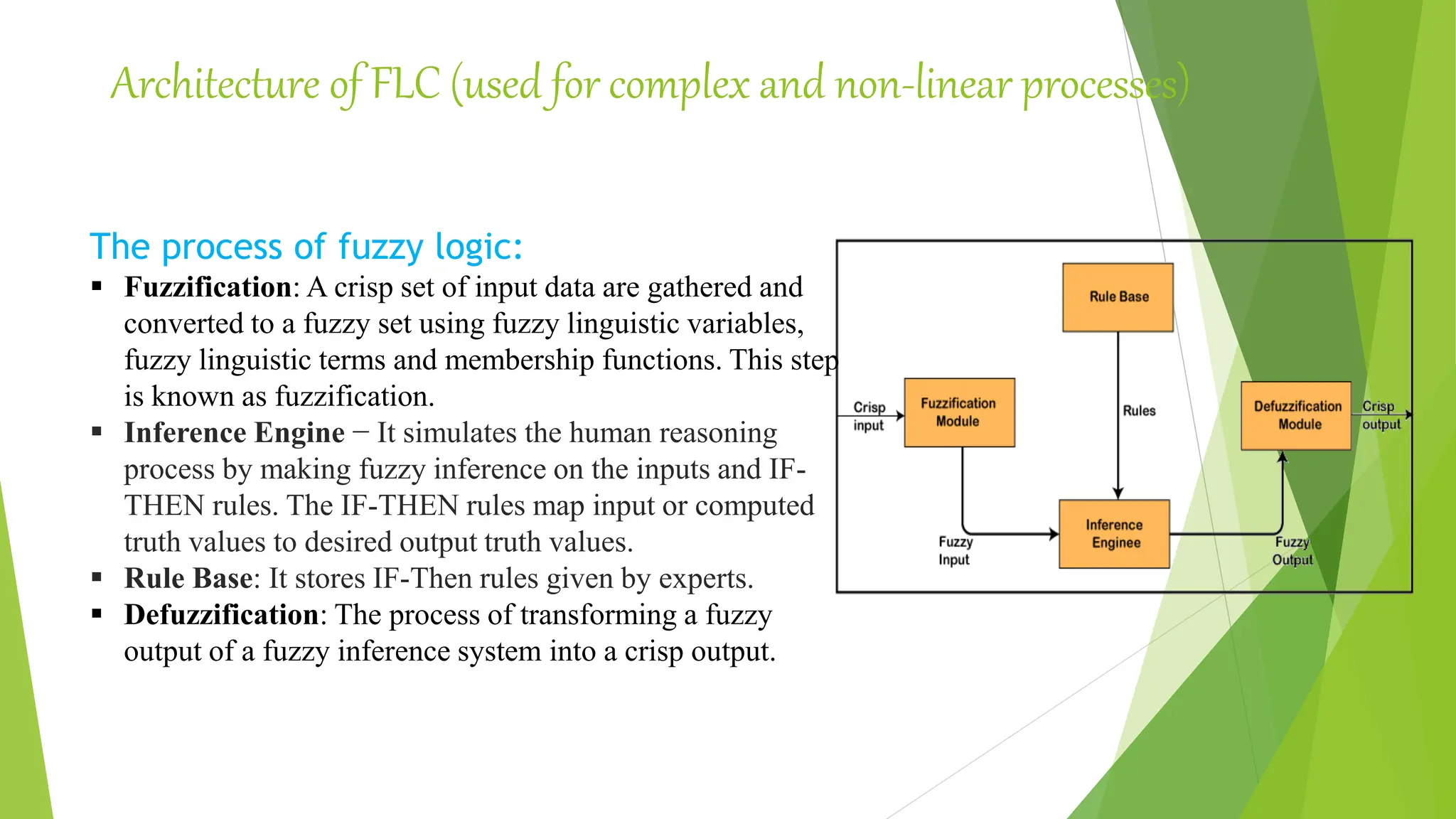
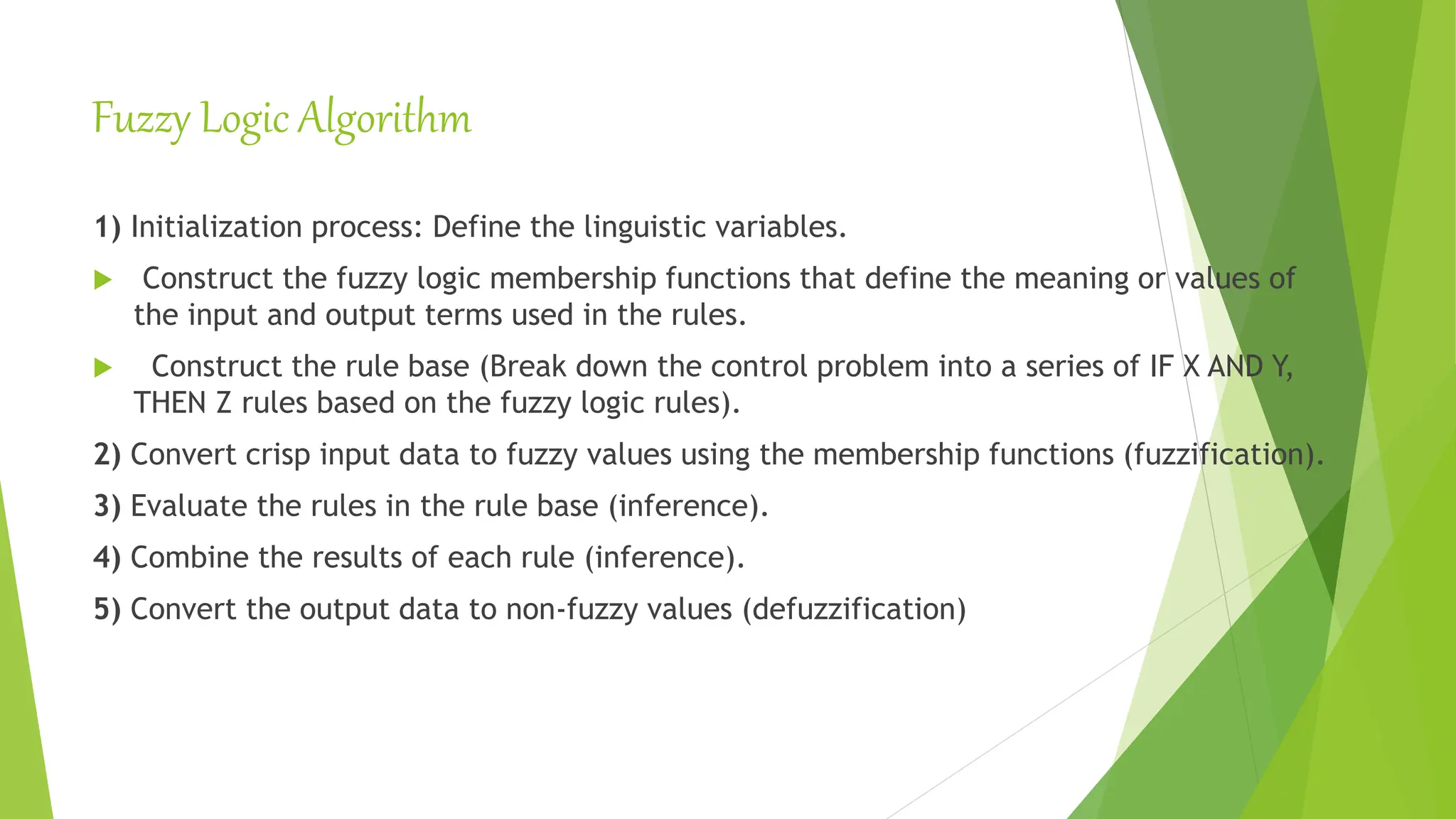
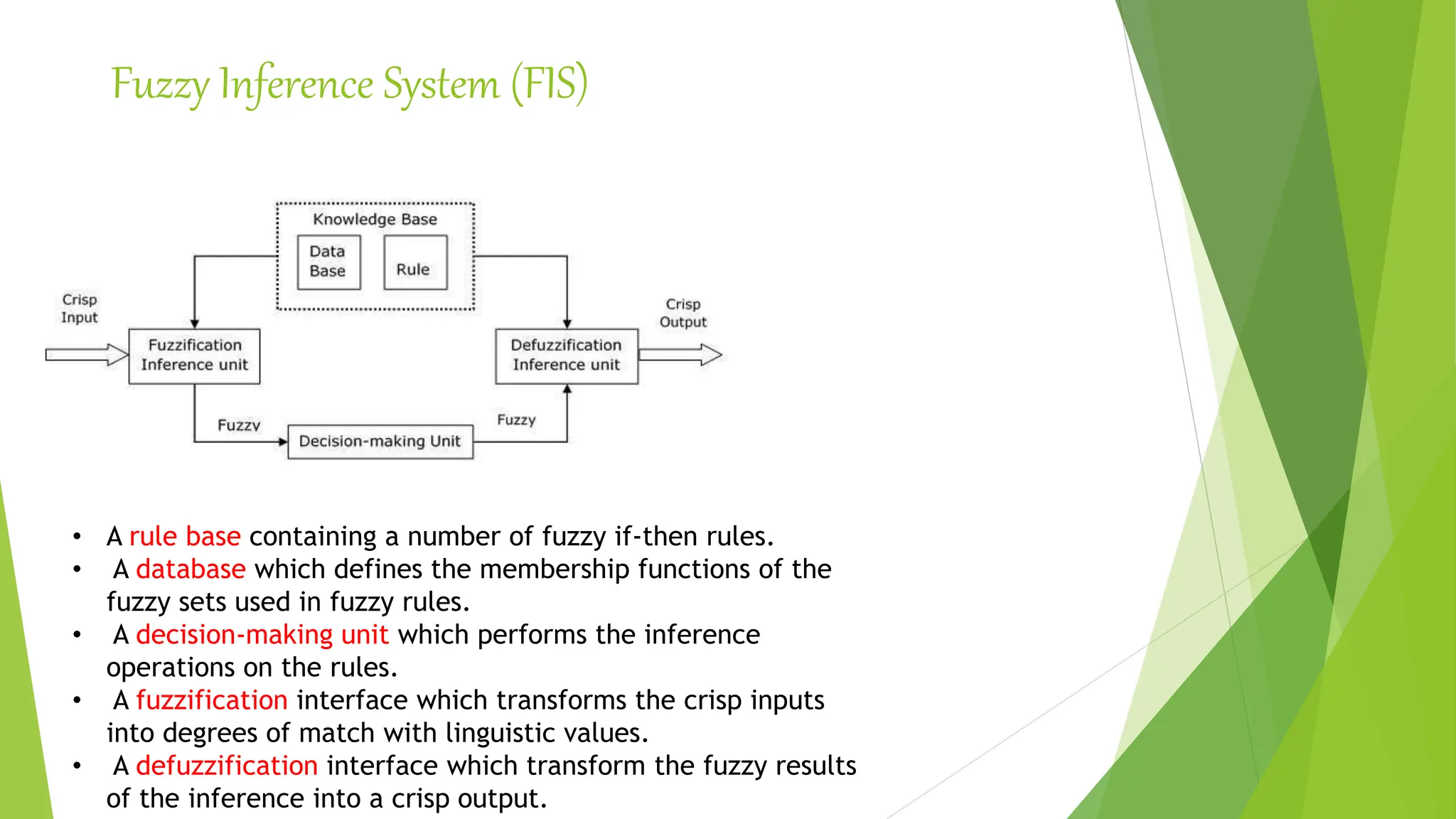
- The architecture of a fuzzy logic controller including fuzzification, inference engine, rule base, and defuzzification.
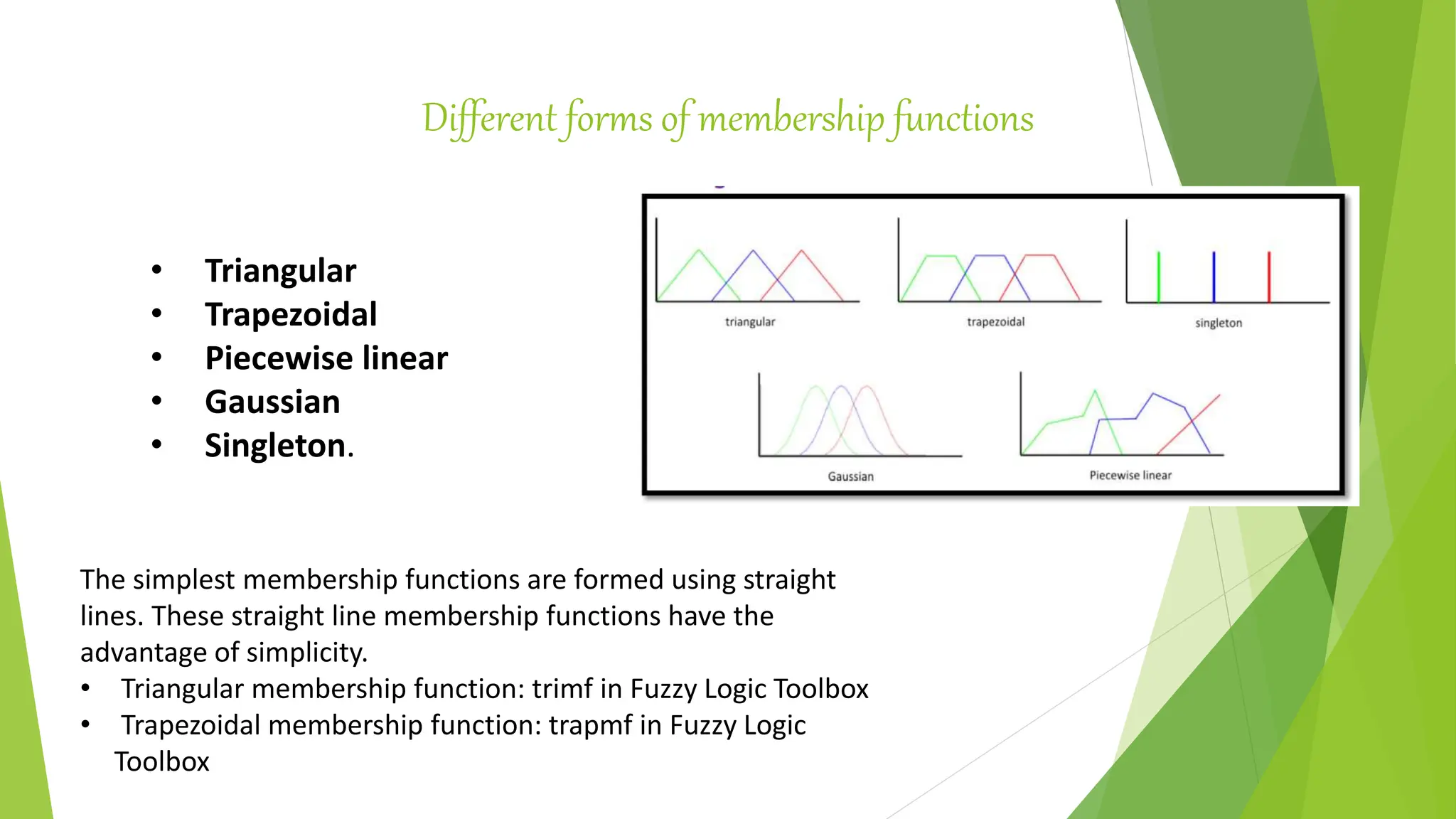
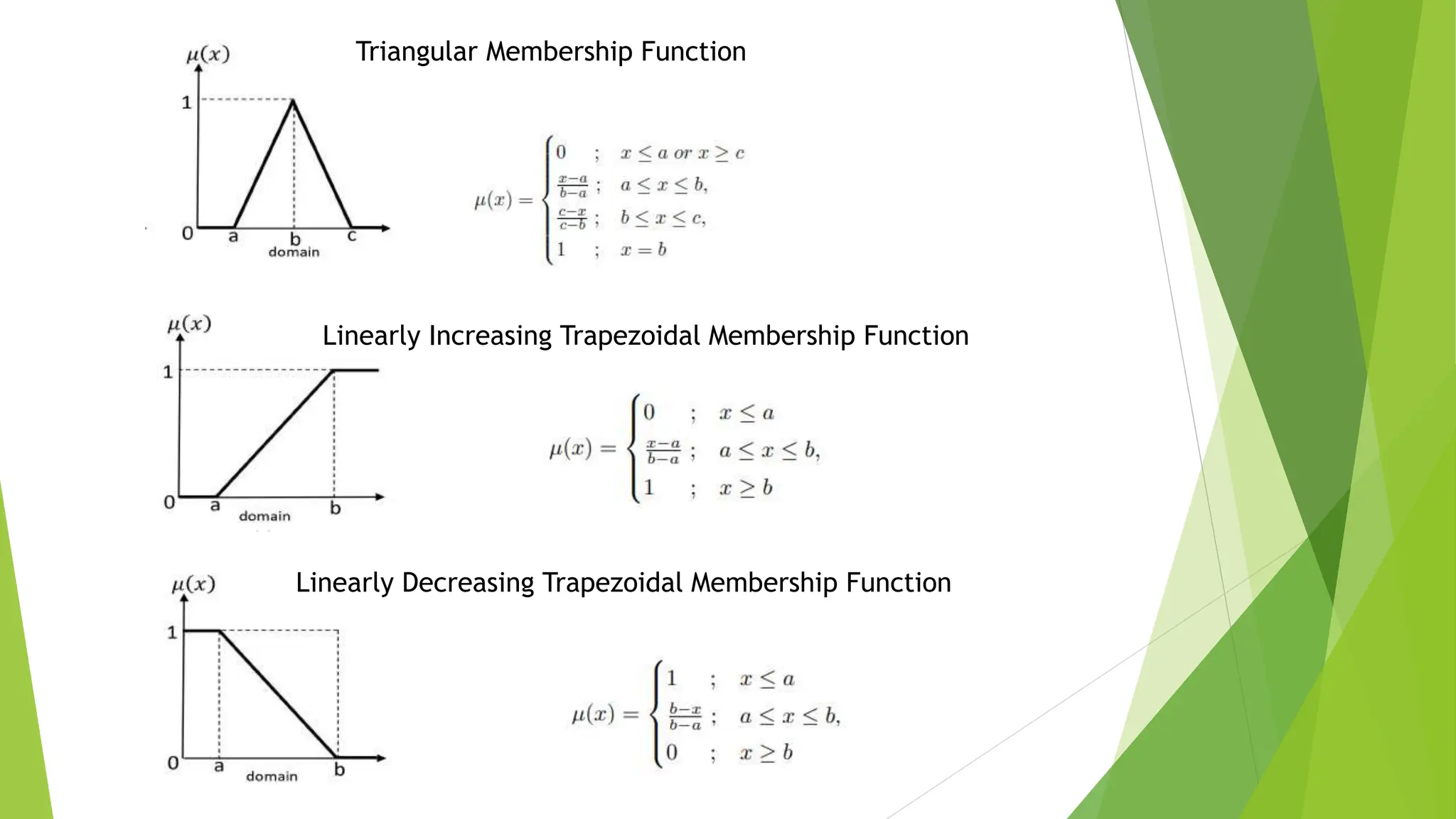
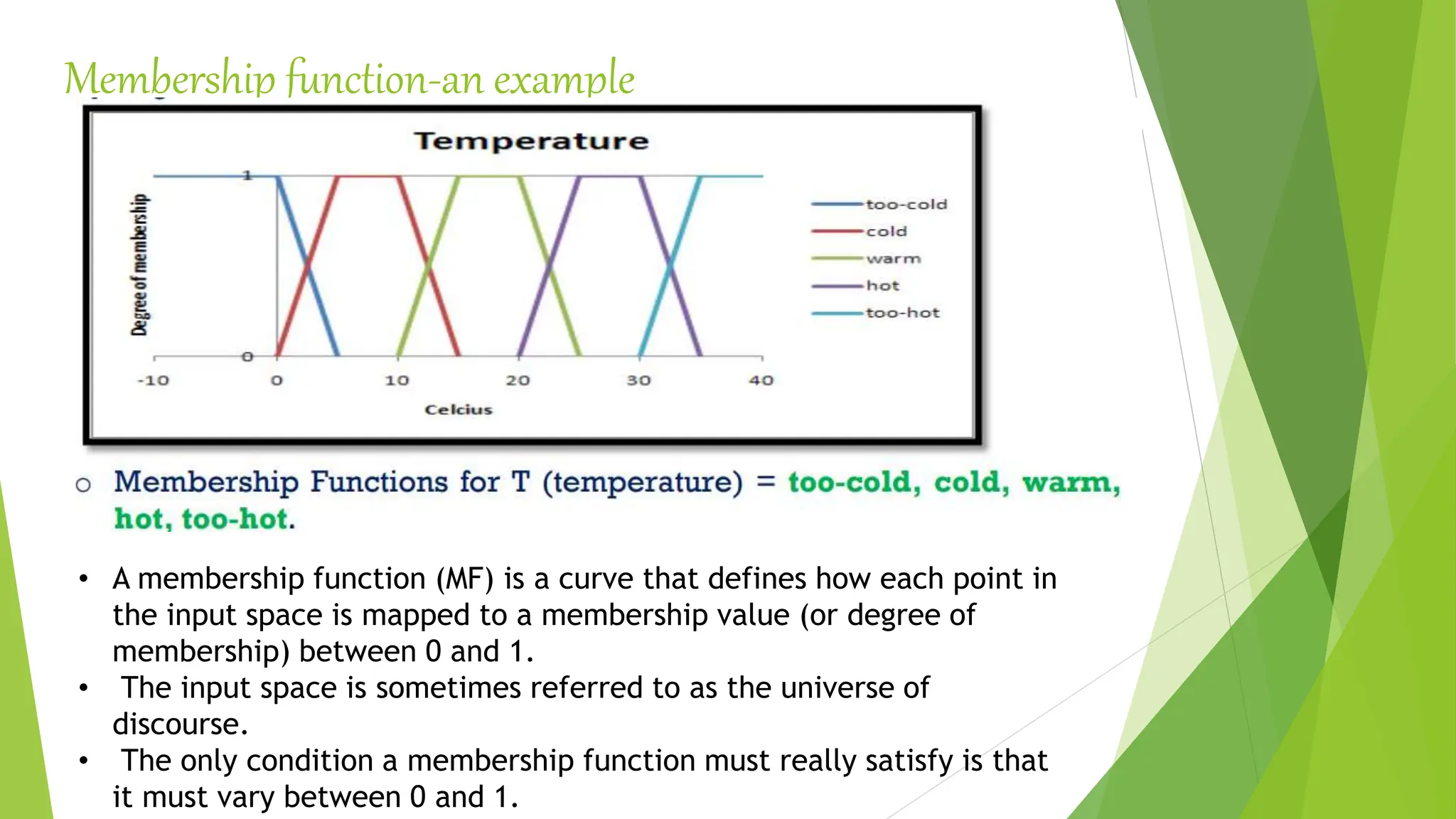
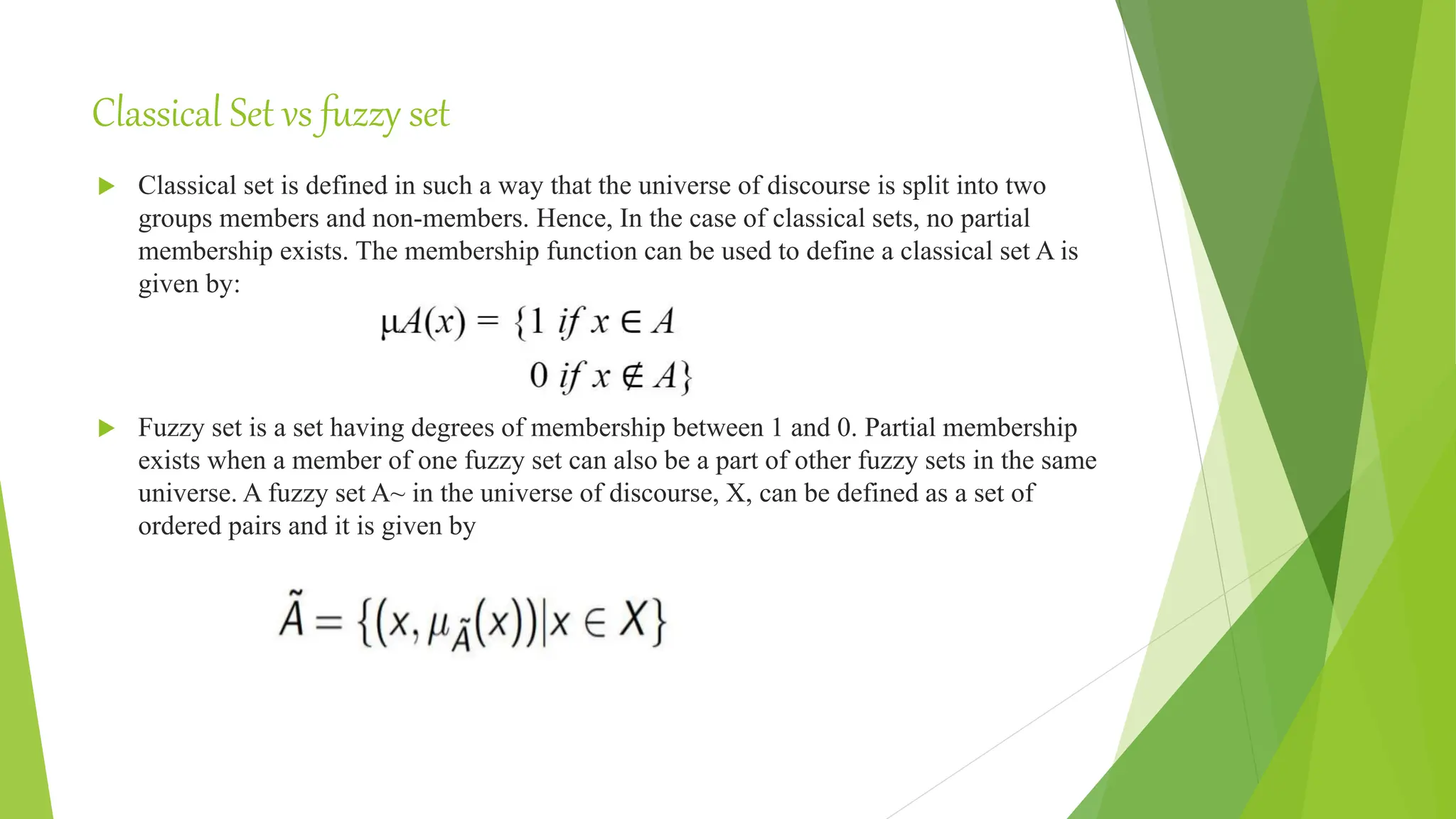
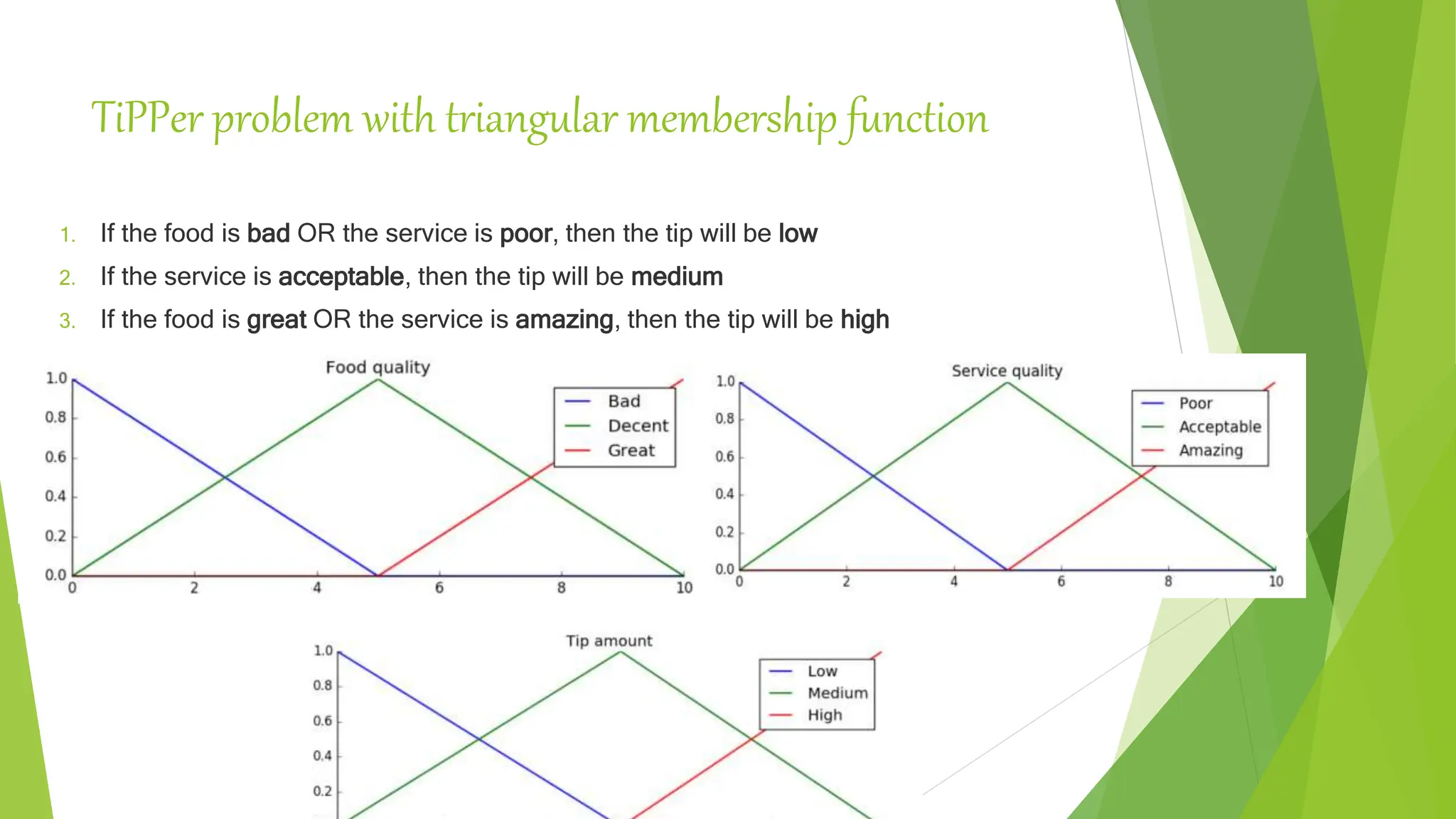
- Membership functions and linguistic variables which are used to quantify fuzzy sets and linguistic terms between 0 and 1. Different types of membership functions are described including triangular, trapezoidal, and Gaussian.
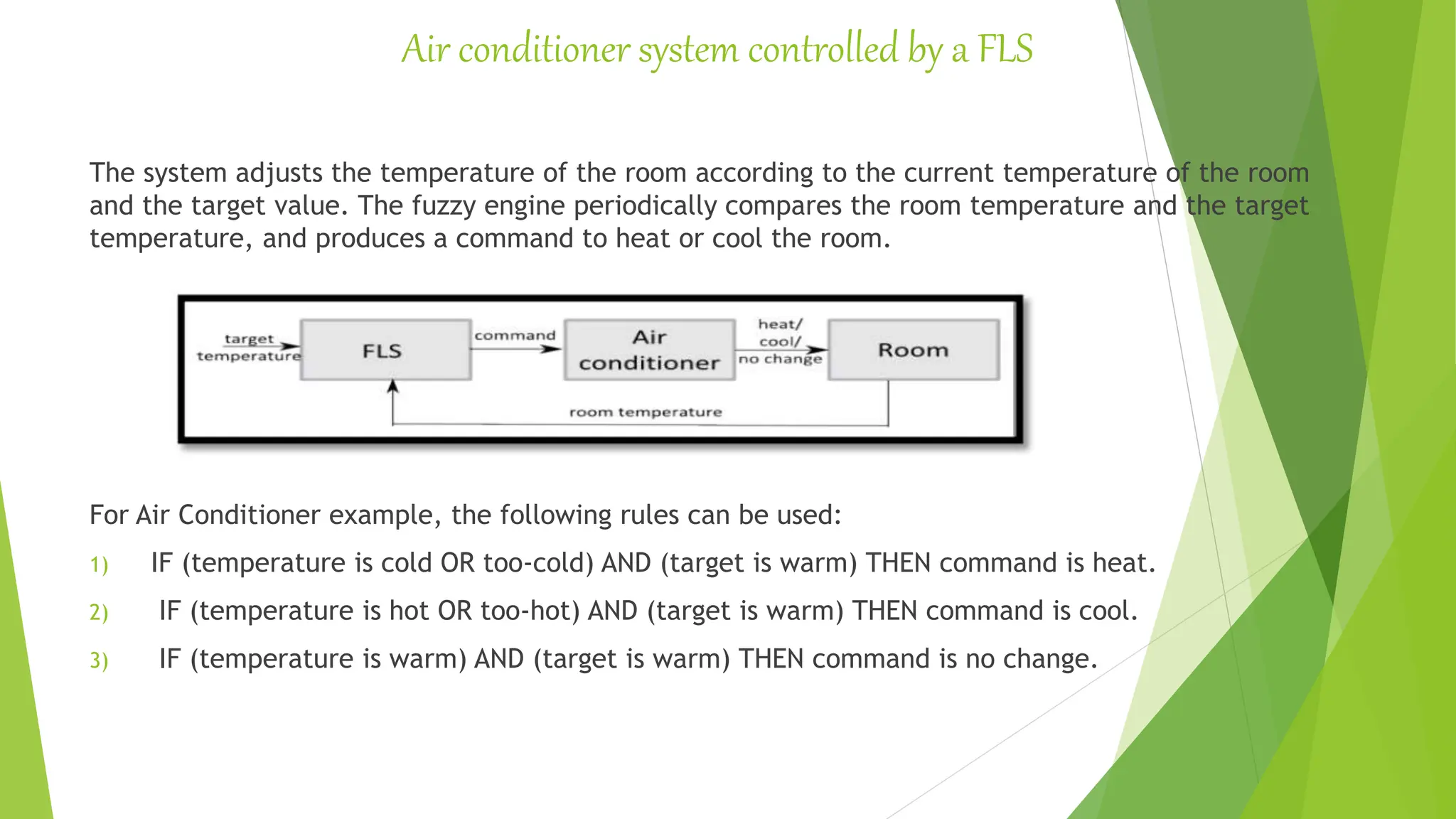
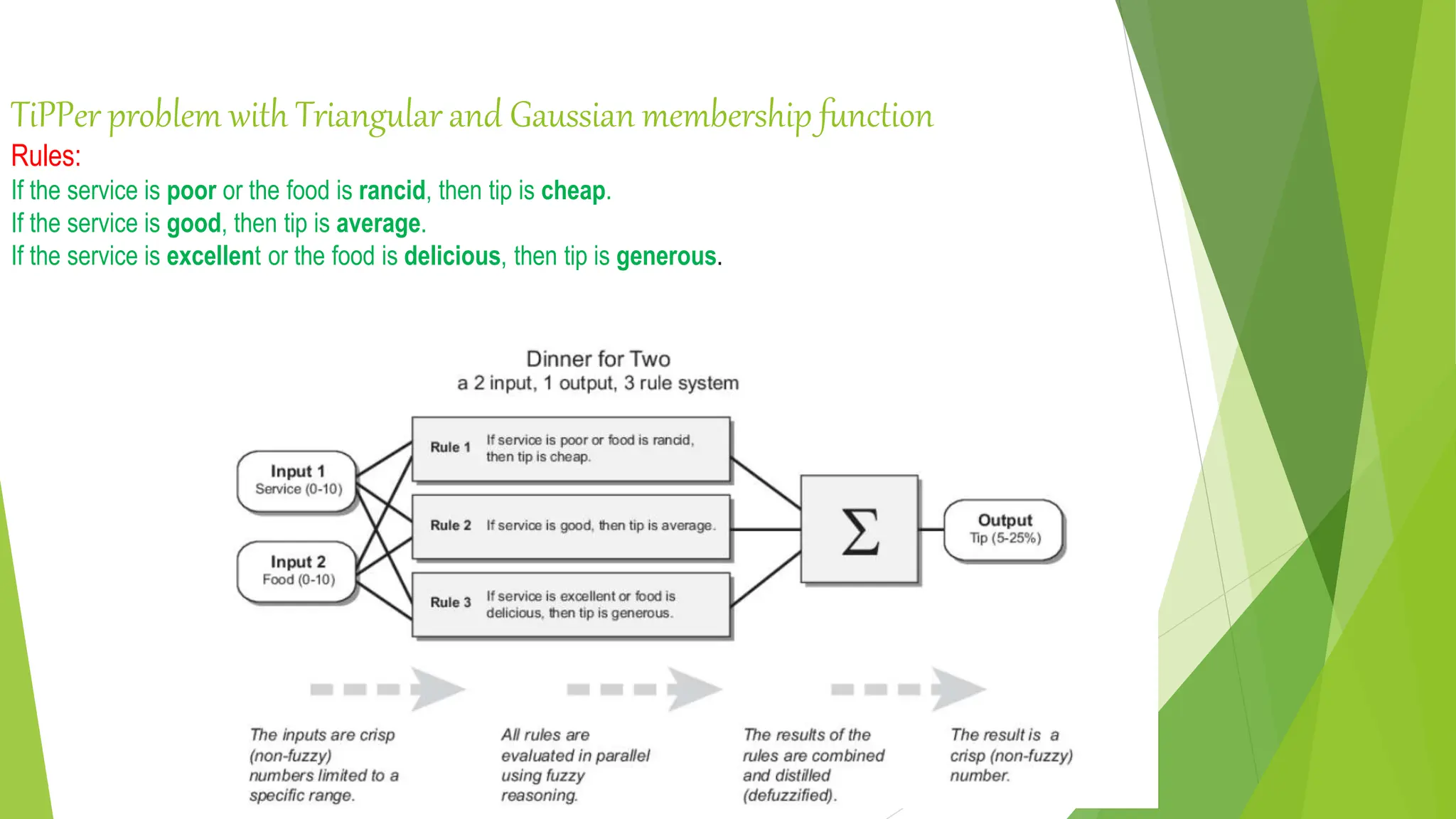
- An example fuzzy logic controller for an air conditioning system that adjusts temperature based on rules relating current and target temperatures.
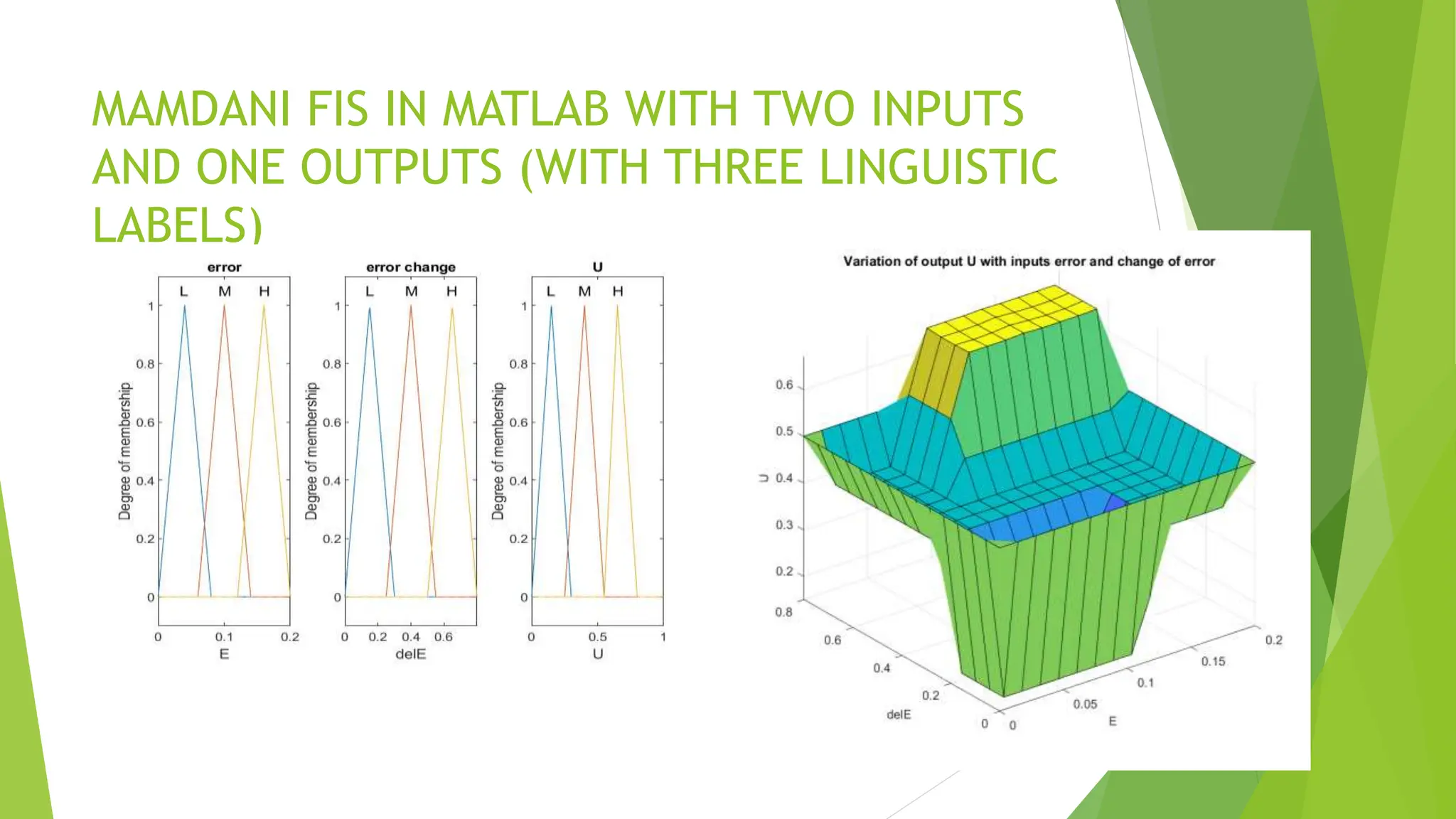
- Implementation of a Mamdani fuzzy logic controller in MATLAB with two inputs, membership functions, a rule base, and one output to control a process.

![Membership Functions and Linguistic Variables
Membership function (MF) - A function which represents the graph of fuzzy
sets that allows users to quantify the linguistic term.
Degree of membership- The output of a membership function, this value is
always limited to between 0 and 1. Also known as a membership value or
membership grade.
A membership function for a fuzzy set A on the universe of discourse X
is defined as μA:X → [0,1]. x axis represents the universe of discourse.
y axis represents the degrees of membership in the [0, 1] interval.
Linguistic variables represent crisp information in a form and precision
appropriate for the problem. Each linguistic term covers a relatively wide range
of numerical values. Its value is not a number but word.](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-5-2048.jpg)
![Membership function of Temperature with linguistic labels: Low Medium
and High
• A fuzzy logic controller describes a control protocol by
means of if-then rules, such as "if temperature is low
open heating valve slightly".
• The ambiguity (uncertainty) in the definition of the
linguistic terms (e.g., low temperature) is represented
by using fuzzy sets, which are sets with overlapping
boundaries, (as shown in the figure).
• In the fuzzy set framework, a particular domain
element can simultaneously belong to several sets
(with different degrees of membership, μ). For
instance, t=20∘C belongs to the set
of High temperatures with membership 0.4 and to the
set of Medium temperatures with membership 0.2.
• This gradual transition from one membership to
another facilitates a smooth outcome of the reasoning
(deduction) with fuzzy if-then rules.
200C =[0, 0.2, 0.4]
= [L, M, H]](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-9-2048.jpg)
![Comparison of Mamdani FIS and Sugeno FIS [Have et al. (2008)]
The most fundamental difference between Mamdani-type FIS and Sugeno-type FIS
is the way the crisp output is generated from the fuzzy inputs.
Mamdani-type FIS uses the technique of defuzzification of a fuzzy output, while
Sugeno-type FIS uses weighted average to compute the crisp output. Hence,
Mamdani FIS has output membership functions whereas Sugeno FIS has no output
membership functions.
Mamdani type is widely accepted for capturing expert knowledge . It allows
describing the expertise in more intuitive, more human like manner.
However, Mamdani-type entails a substantial computational burden. On the other
hand, Sugeno method is computationally efficient and works well with optimization
and adaptive techniques, which makes it very attractive in different applications.
Mamdani-type FIS is less flexible in system design in comparison to Sugeno-type FIS
as latter can be integrated with ANFIS tool to optimize the outputs.
The antecedent part of the rules is same for both. Only the consequent part differs.
Mamdani is implemented on MISO and MIMO systems while Sugeno works only on
MISO systems.
Rule base of Mamdani is of the form IF x is A and y is B THEN z is C while rule
base of Sugeno is of the form IF x is A and y is B THEN z = f(x, y).](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-20-2048.jpg)
![Models of Fuzzy Logic Controllers(FLC)
[R.Mudi et al. (2001)]
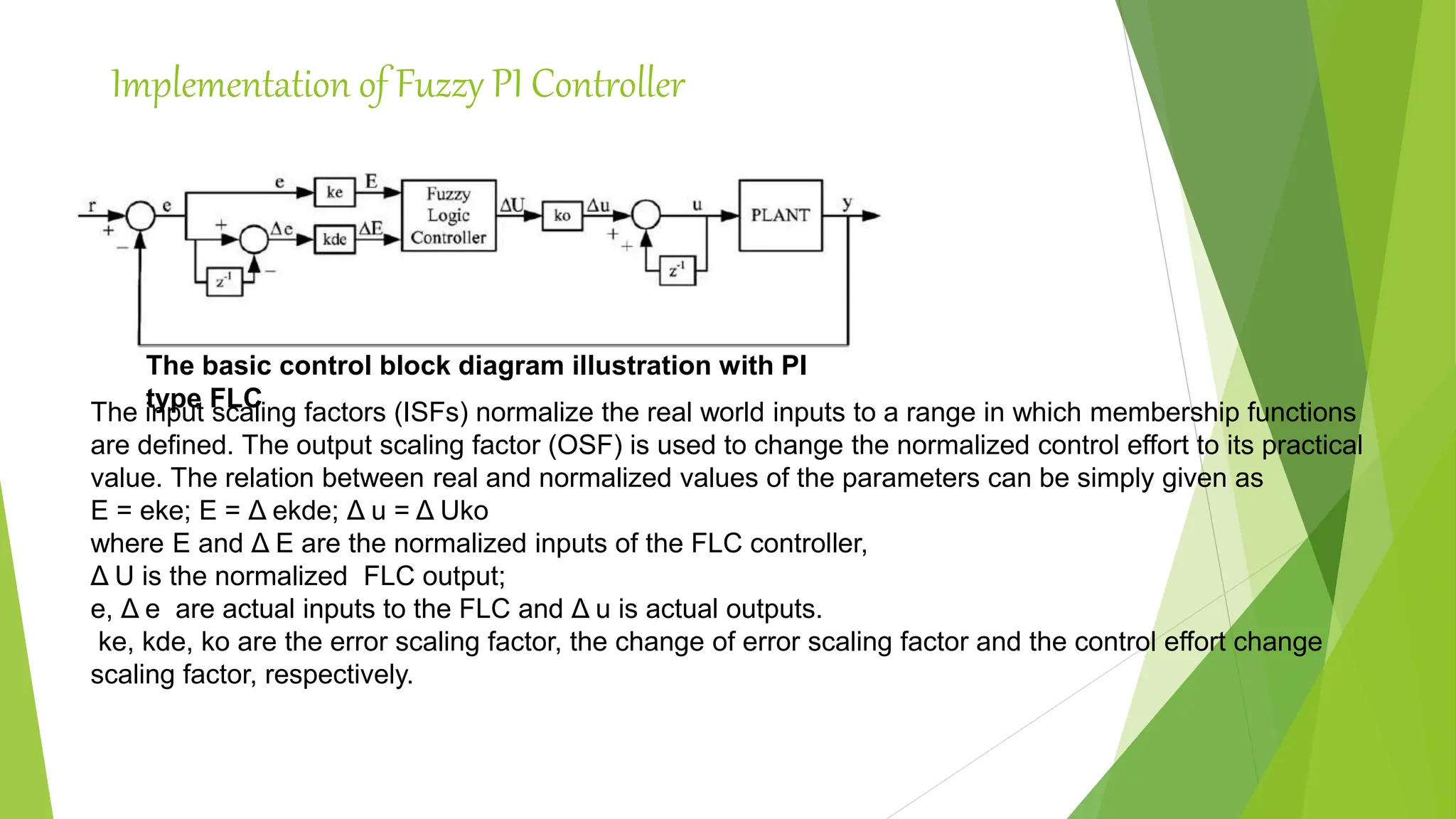
Fuzzy PI controller (commonly used)- The conventional FPIC is
described by the equation
u(k + 1) = u(k)+Δu(k)
where k is the sampling instance and Δu(k) is the incremental change in
controller output, determined by fuzzy rules of the form
“If e is E and Δe is ΔE then Δu is Δ U”
Where e and Δe are error and incremental change in error signal
respectively.
Fuzzy PD controller (not recommendable) - The fuzzy PD controller
(FPDC), on the other hand uses rules of the form :
“If e is E and Δe is ΔE then u is U”.
Fuzzy PID controller are rarely used due to the difficulties associated with
the formulation of a comparatively larger rule-base and its tuning of more
parameters.](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-21-2048.jpg)
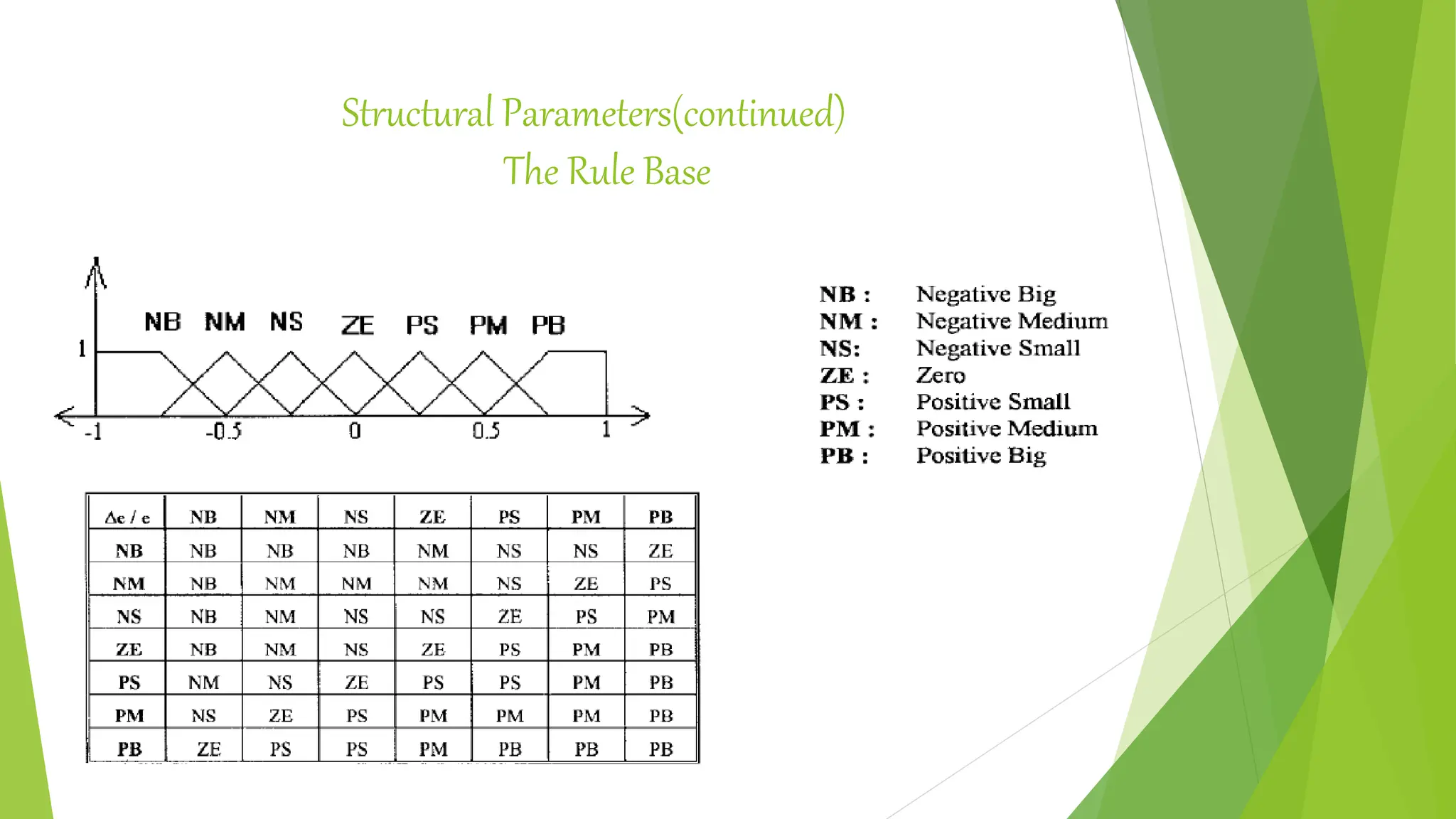
![Detailed design considerations-Structural Parameters
(input/output (I/O) variables of fuzzy inference, fuzzy linguistic sets, membership functions, fuzzy
rules, inference mechanism and defuzzification mechanism)
[R.Mudi (1999)]
Membership function for inputs (e, Δ e ) and output (Δ u )
The input variables are decomposed into at least seven fuzzy linguistic levels in
order to make a considerable distinction between the fuzzy regions and, thus,
to obtain fine tuned control action.
The universe of discourse is chosen to be[-1, 1] for the membership functions of
input and output variables.
The input and output parameters are scaled to fit this range via scaling factors.
We use symmetric triangles (except the two MF’s at the extreme ends) with equal base
and 50% overlap with neighboring MF’s as shown in the figure below. This is the most
natural and unbiased choice for MF’s.](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-23-2048.jpg)
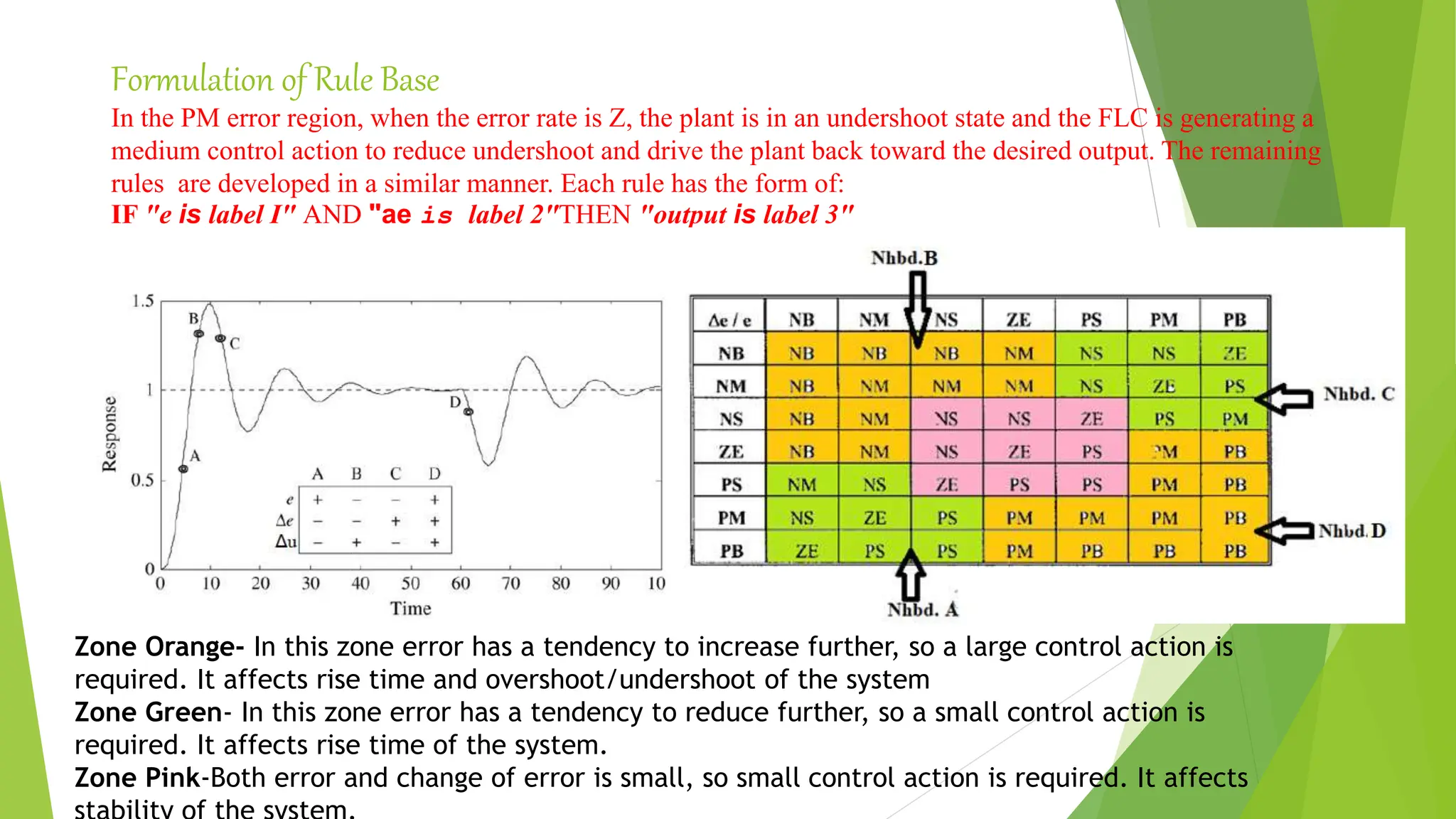
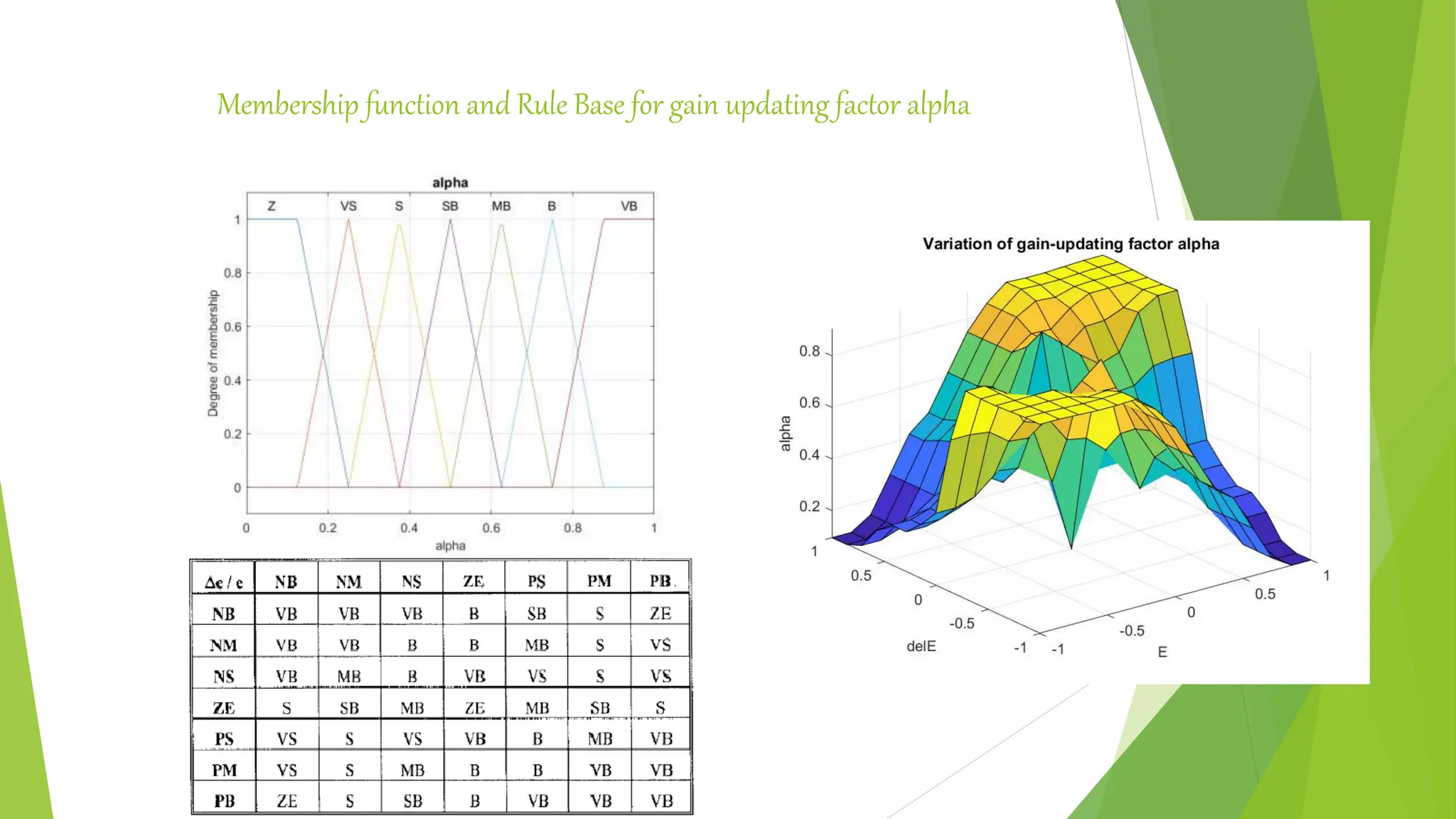
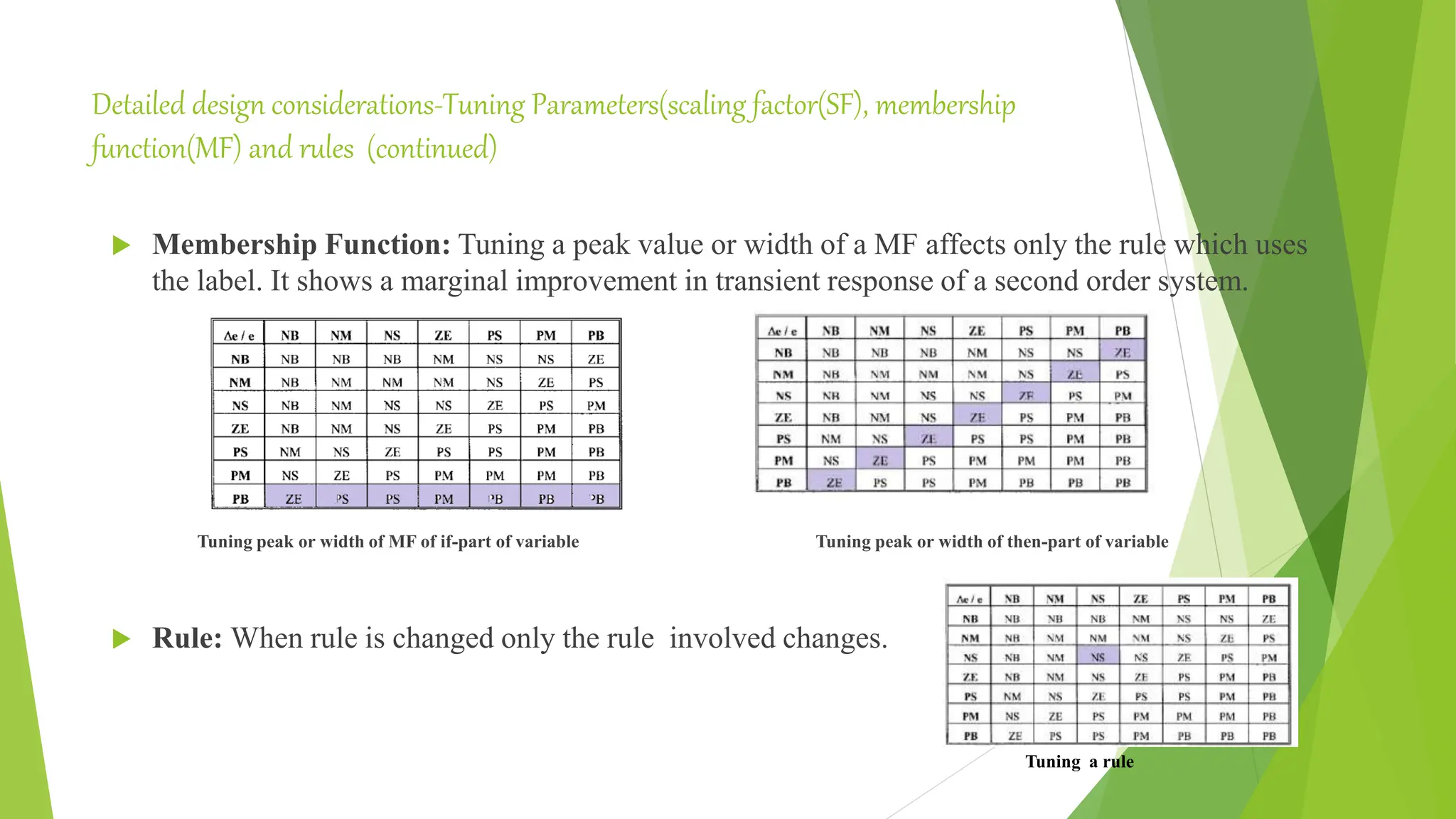
![Detailed design considerations-Tuning Parameters(scaling factor(SF),
membership function(MF) and rules
Tune the parameters of PI-type FLC’s in order of their significance; that is, first
parameters with a global effect (SF) and then ones with only local effect (MF and
rules) and, hence, given the maximum importance to the tuning of SF’s.
Scaling Factor: The values of the actual inputs are mapped onto [ -1, 1] by the input SF’s and , the
controller output is mapped onto the respective actual output or domain by the output SF by trial and error.
Tuning the SF affects all the rules of the rule base .
Tuning Scaling factor](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-26-2048.jpg)
![fis1 = mamfis;
%Membership function for inputs 'error' and 'change of error'
fis1 = addInput(fis1,[0 0.2],'Name','E');
fis1 = addInput(fis1,[0 0.8],'Name','delE');
fis1 = addMF(fis1,'E','trimf',1*[0 0.04 0.08],'Name','L');
fis1 = addMF(fis1,'E','trimf',1*[0.06 0.1 0.14],'Name','M');
fis1 = addMF(fis1,'E','trimf',1*[0.12 0.16 0.2],'Name','H');
fis1 = addMF(fis1,'delE','trimf',1*[0 0.15 0.3],'Name','L');
fis1 = addMF(fis1,'delE','trimf',1*[0.25 0.4
0.55],'Name','M');
fis1 = addMF(fis1,'delE','trimf',1*[0.5 0.650.8],'Name','H');
figure
subplot(1,3,1)
plotmf(fis1,'input',1)
title('error')
subplot(1,3,2)
plotmf(fis1,'input',2)
title('error change')
%Membership function for output control signal'U'
fis1 = addOutput(fis1,[0 1],'Name','U');
fis1 = addMF(fis1,'U','trimf',1*[0 0.15 0.3],'Name','L');
fis1 = addMF(fis1,'U','trimf',1*[0.25 0.4 0.55],'Name','M');
fis1 = addMF(fis1,'U','trimf',1*[0.55 0.65 0.8],'Name','H');](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-29-2048.jpg)
![subplot(1,3,3)
plotmf(fis1,'output',1)
title('U')
% form Rule Base
rules = [...
"E==L & delE==L => U=L"; ...
"E==L & delE==M => U=M"; ...
"E==L & delE==H => U=M"; ...
"E==M & delE==L => U=L"; ...
"E==M & delE==M => U=M"; ...
"E==M & delE==H => U=H"; ...
"E==H & delE==L => U=M"; ...
"E==H & delE==M => U=M"; ...
"E==H & delE==H => U=H" ...
];
fis1 = addRule(fis1,rules);
figure
gensurf(fis1)
title('Variation of output U with inputs error and
change of error')
figure
plotfis(fis1)
writeFIS(fis1,'myFile')](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-30-2048.jpg)
![MAMDANI FIS in MATLAB
Selected two inputs for Error as ‘E’ and change of Error as ‘delE’ and one output as ‘U’.
Defined triangular membership functions in the universe of discourse [-1,1]. Each
membership has seven linguistic labels.
fis1 = mamfis;
%Membership function for inputs 'error' and 'change of error'
fis1 = addInput(fis1,[-1 1],'Name','E');
fis1 = addInput(fis1,[-1 1],'Name','delE');
fis1 = addMF(fis1,'E','trimf',[-1.32 -1 -0.66],'Name','NL');
fis1 = addMF(fis1,'E','trimf',[-1 -0.66 -0.33],'Name','NM');](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-31-2048.jpg)
![MAMDANI FIS in MATLAB
% form Rule Base
rules = [...
"E==NL & delE==PL => U=Z"; ...
"E==NL & delE==PM => U=NS"; ...
"E==NL & delE==PS => U=NM"; ...
"E==NL & delE==Z => U=NL"; ...
];
fis1 = addRule(fis1,rules);
gensurf(fis1)
title('Control surface of conventional FLC')
writeFIS(fis1,'myFile')](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-32-2048.jpg)
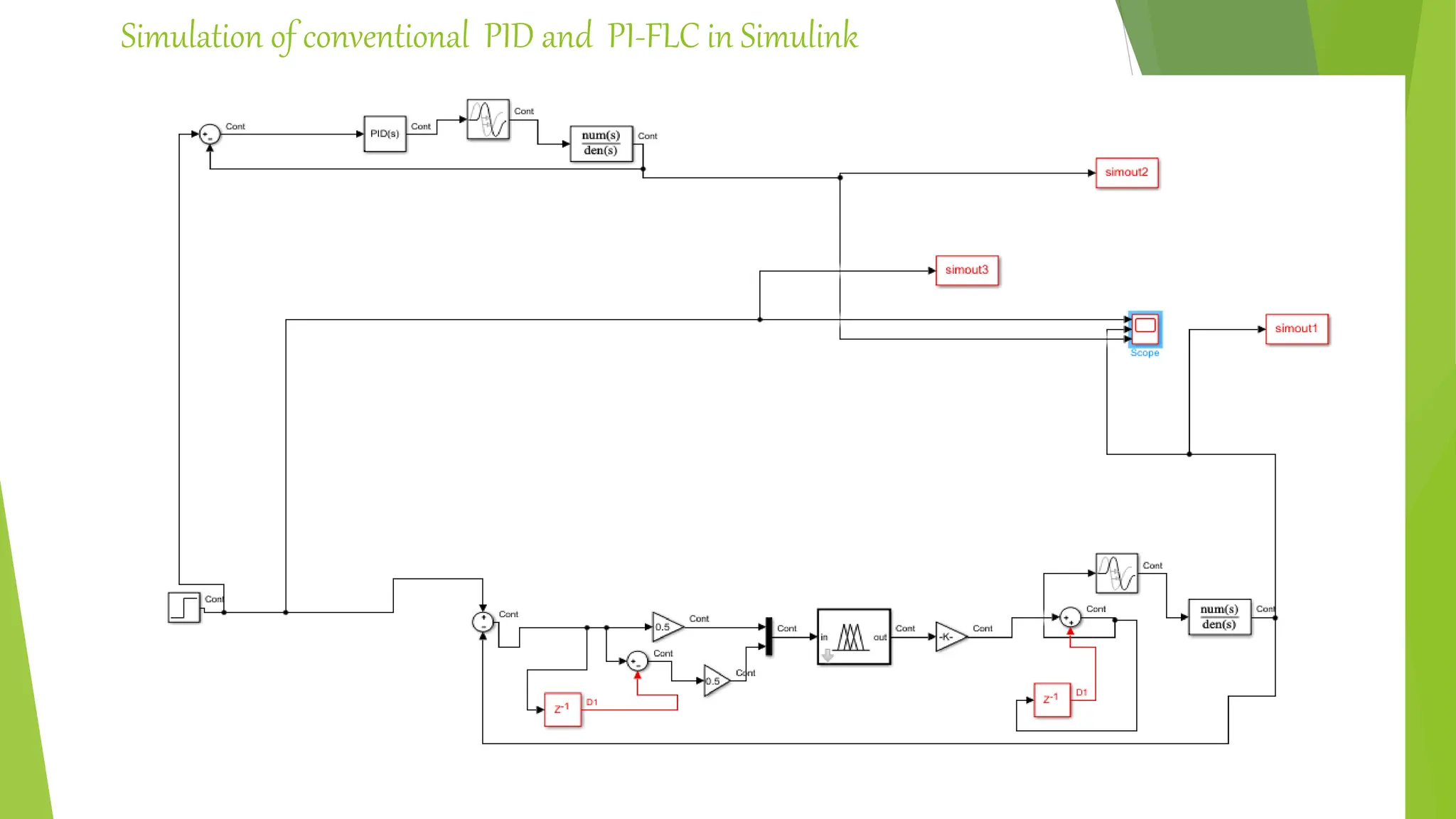
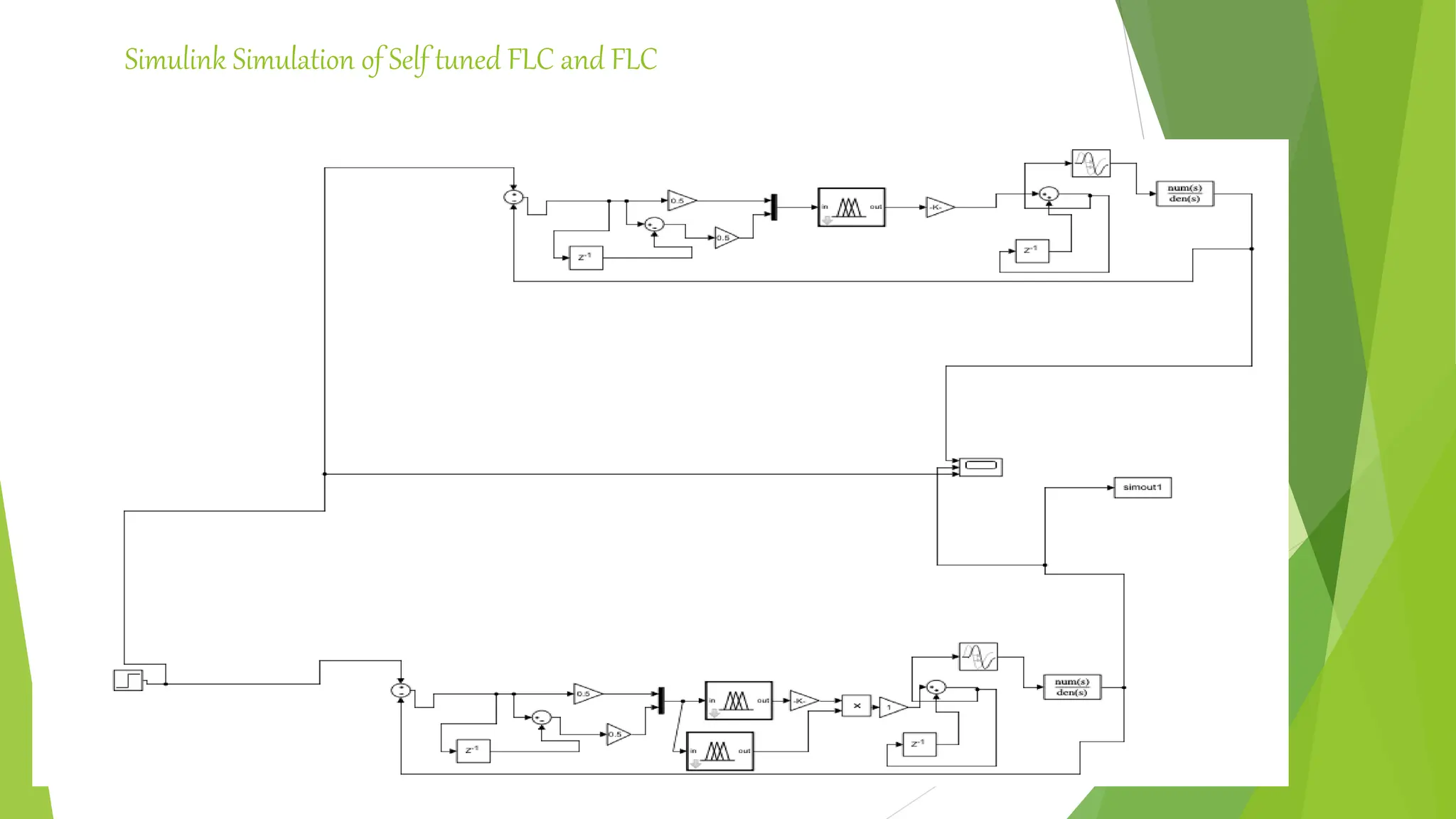
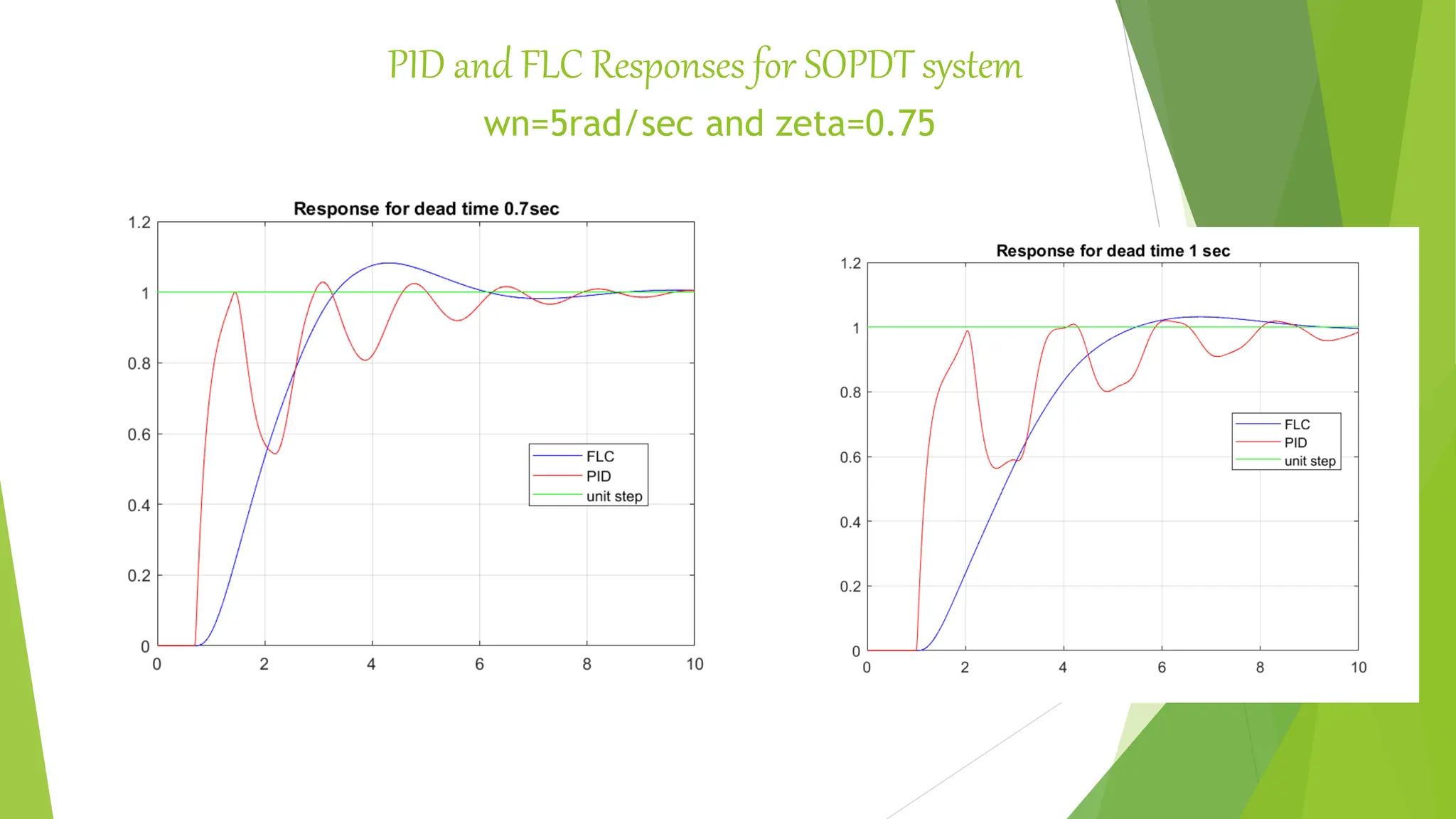
![Simulink Simulation of PID and Self Tuned FLC [R.Mudi et al.( 1999)]](https://image.slidesharecdn.com/fuzzylogiccontroller-231120184042-1abf00c4/75/Fuzzy-Logic-Controller-pptx-35-2048.jpg)