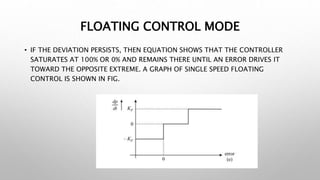
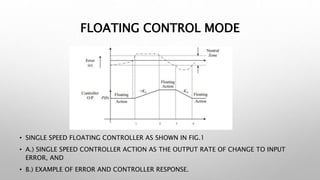
This document describes floating control mode in industrial processes. In floating control mode, the controller output does not have a unique value determined by the error - it "floats" at its current setting when error is zero. There are two main types: single speed, where the output changes at a fixed rate when error exceeds the neutral zone, and multiple speed, where the output rate increases as deviation exceeds certain limits. Equations are provided to model the behavior of single and multiple speed floating control modes.