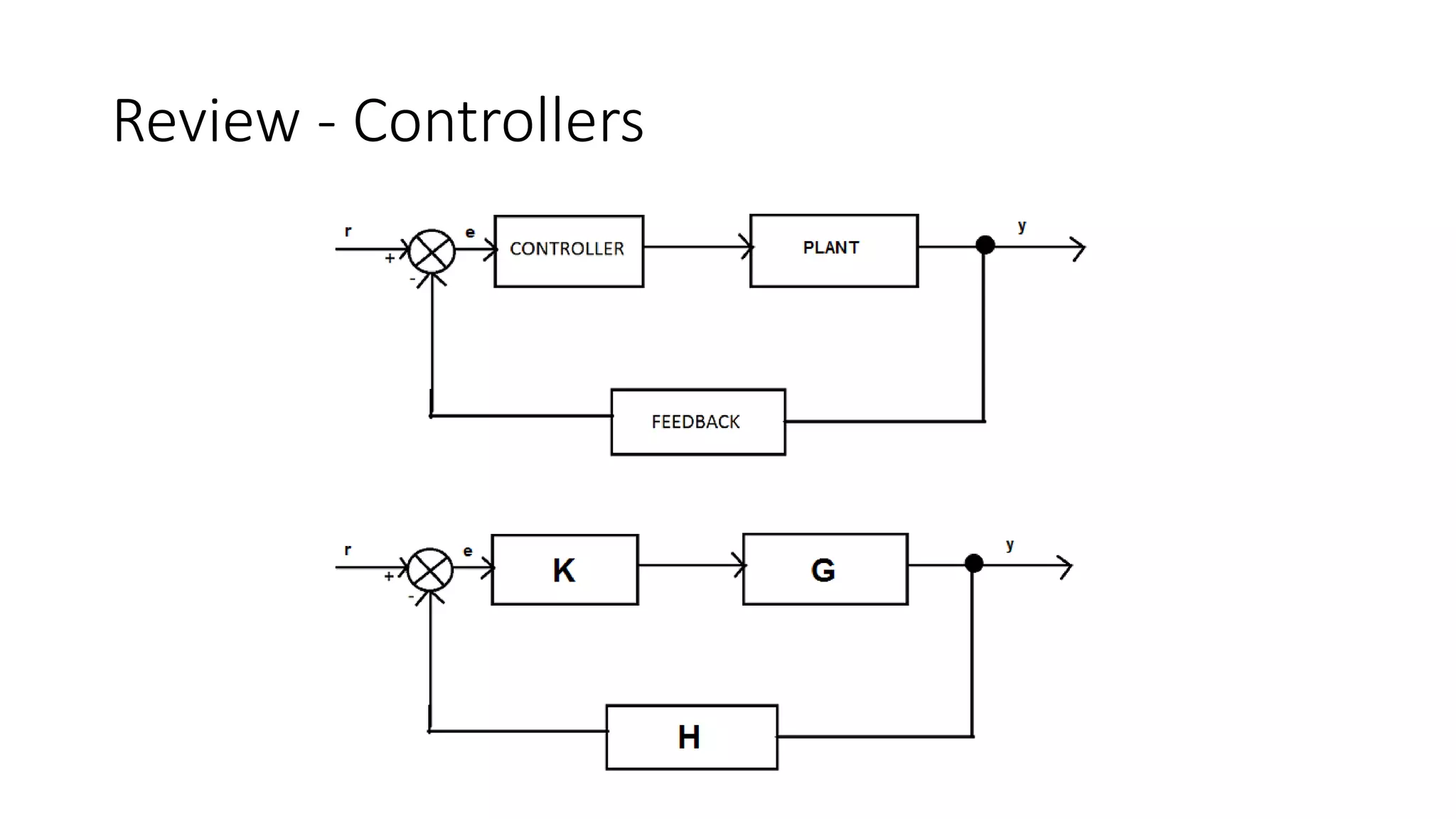
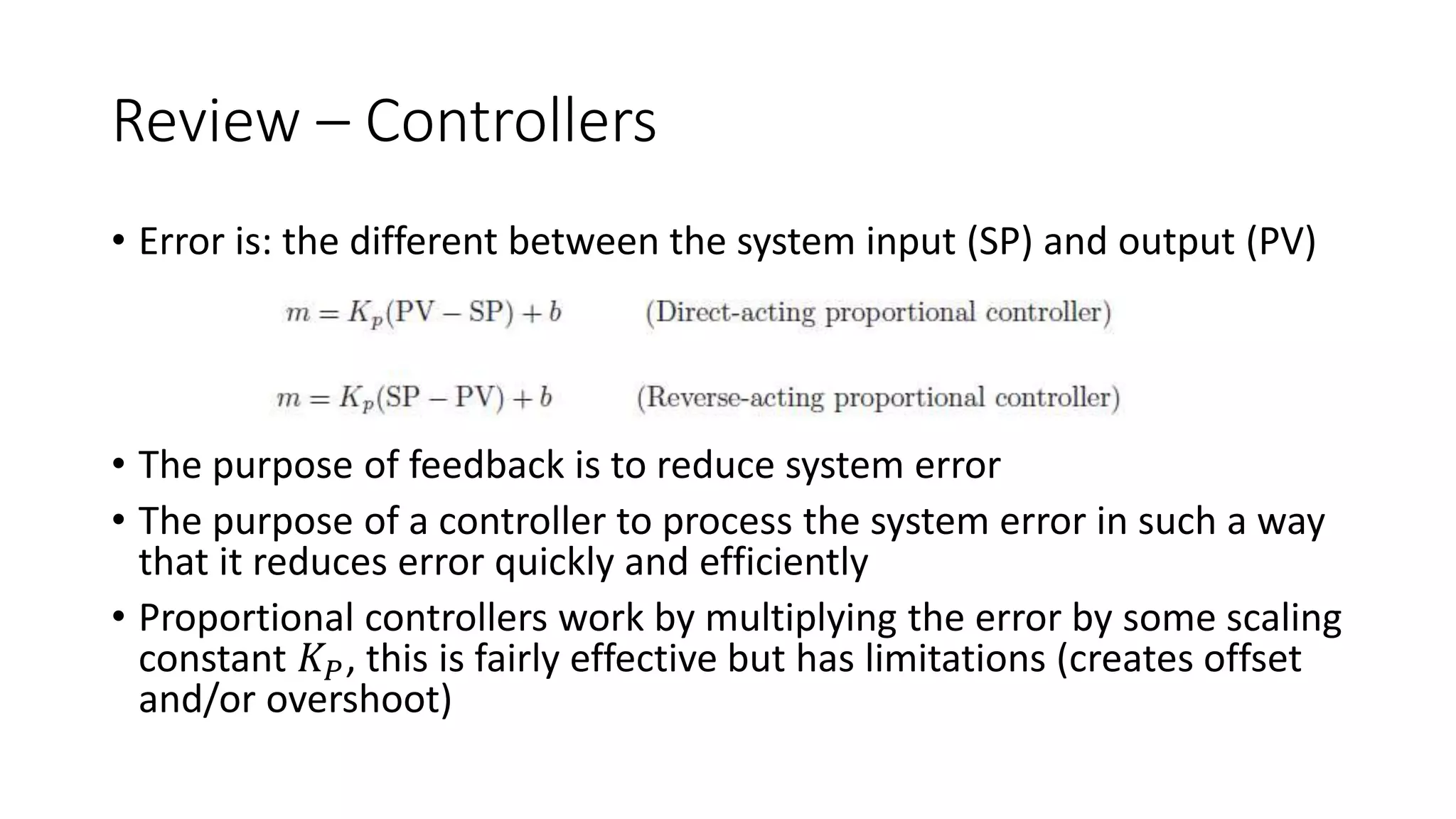
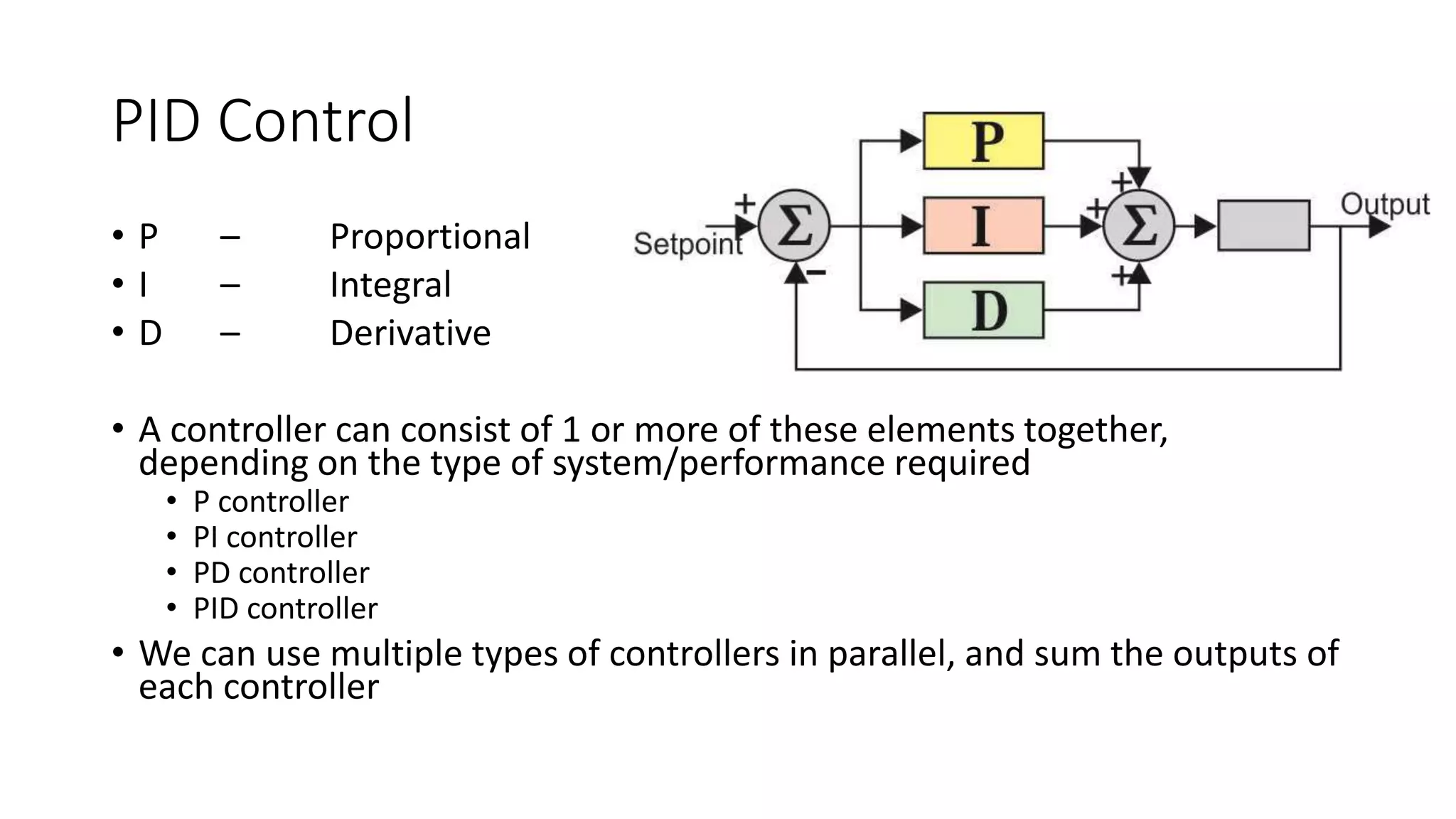
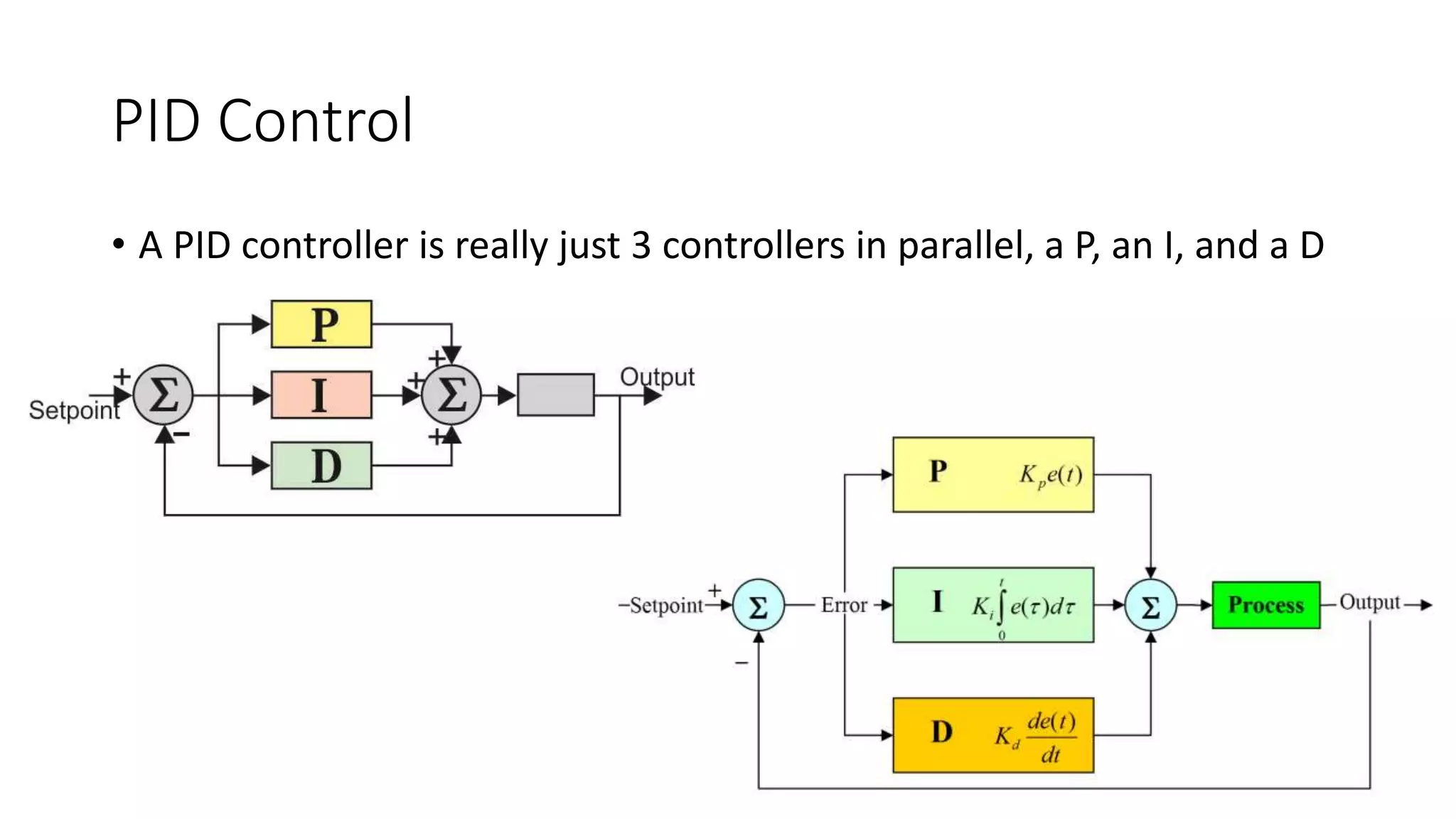
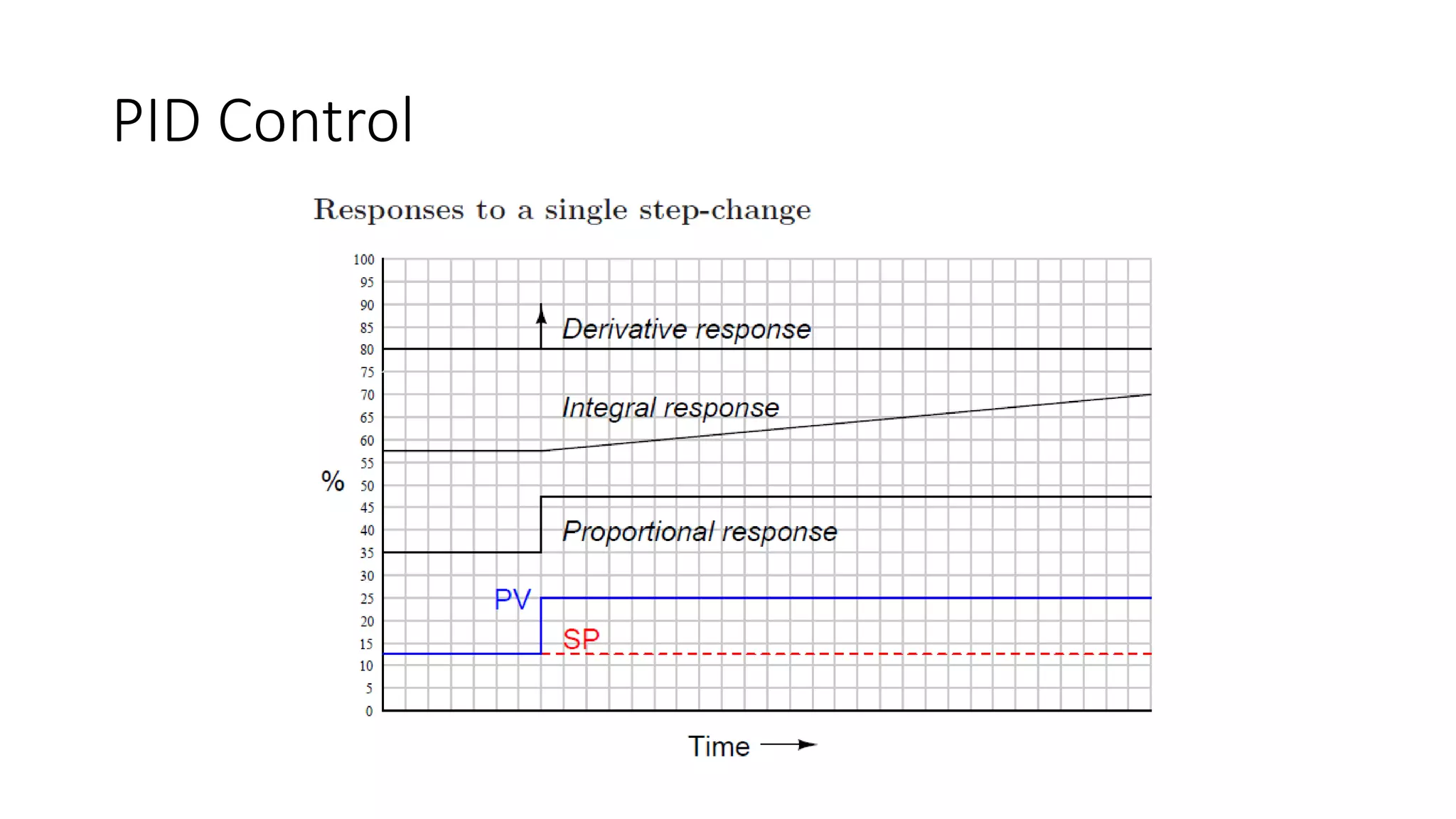
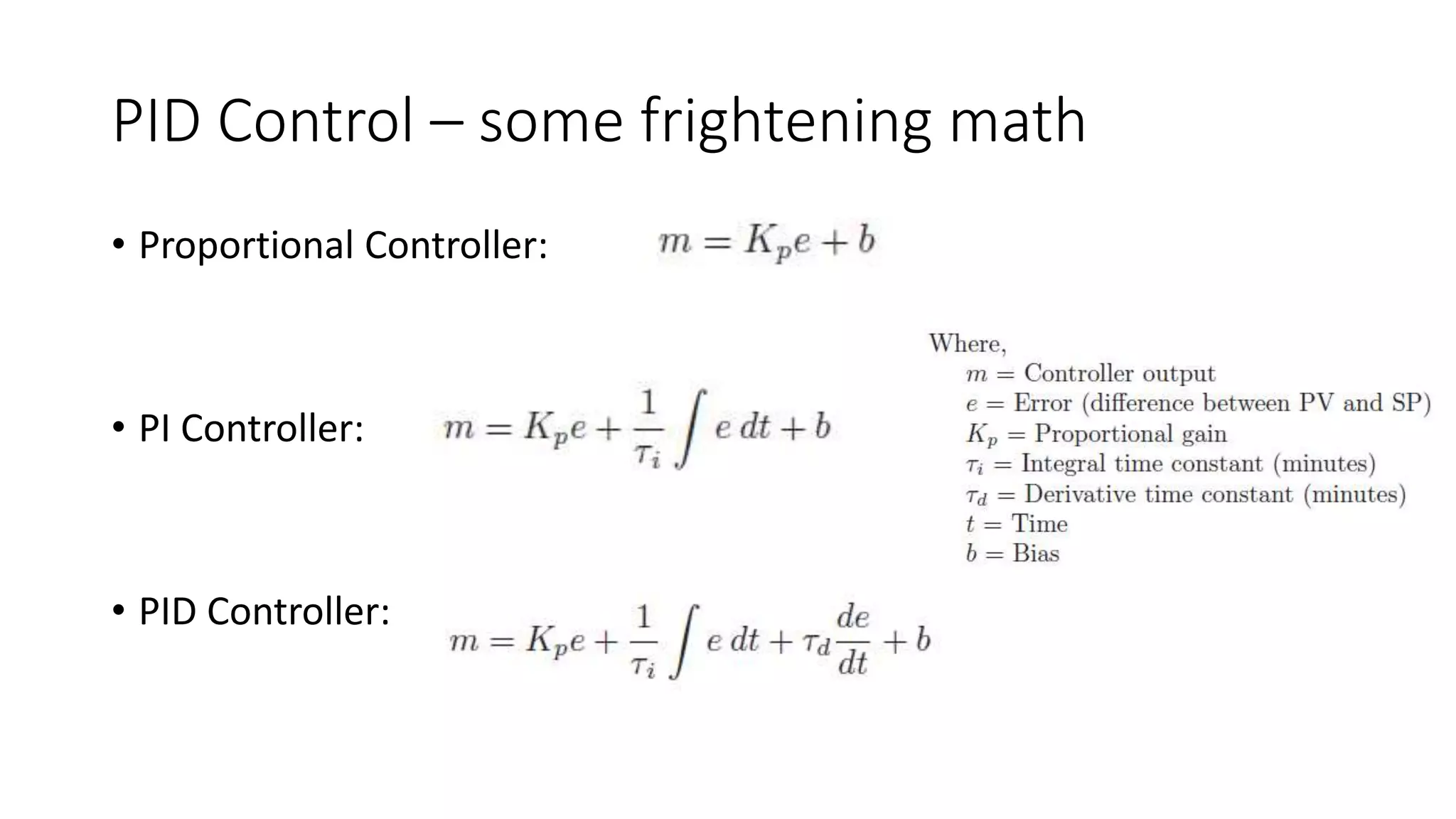
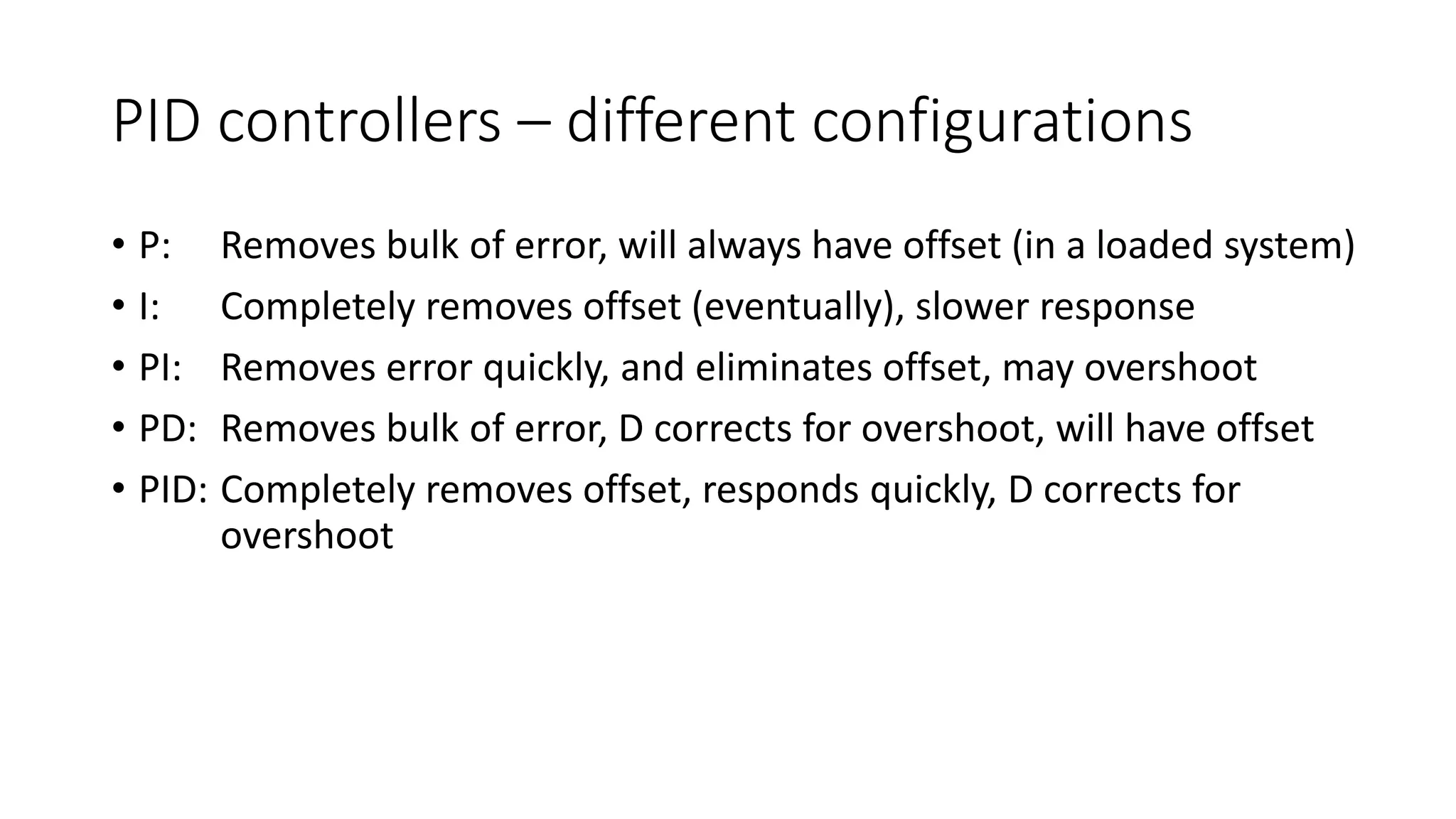
The document discusses PID control for electronic systems. PID controllers use proportional, integral, and derivative terms to control systems. Proportional control responds to current error, integral control responds to accumulated past error to eliminate offsets, and derivative control responds to the rate of change of error to reduce overshoot from P and I terms. Together in a PID controller, the P, I, and D terms work to quickly reduce error, eliminate offsets, and minimize overshoot for effective system control.