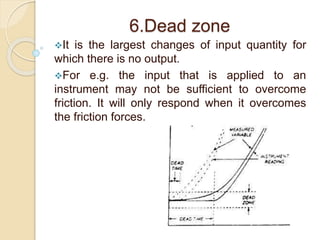
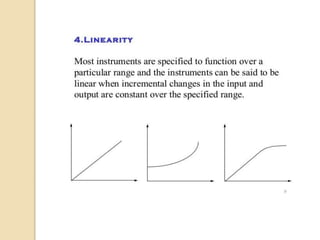
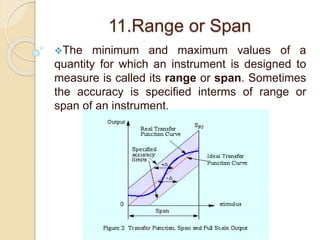
This document presents information on the characteristics of instruments. It discusses both static and dynamic characteristics. The main static characteristics described are accuracy, sensitivity, reproducibility, drift, static error, dead zone, precision, threshold, linearity, stability, range/span, bias, tolerance, and hysteresis. The dynamic characteristics covered are speed of response, fidelity, lag, and dynamic error. The document was created by five students and guided by a professor to provide an overview of important instrument characteristics.