Downloaded 12 times
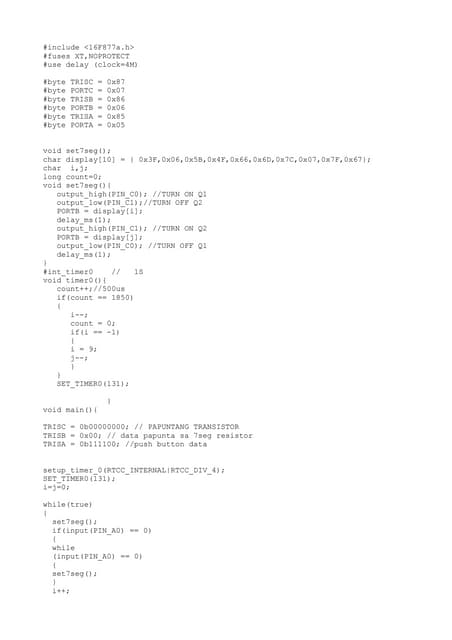
![Interface 7 Segment with MC. Display the number from 0-9 on 7 Segment
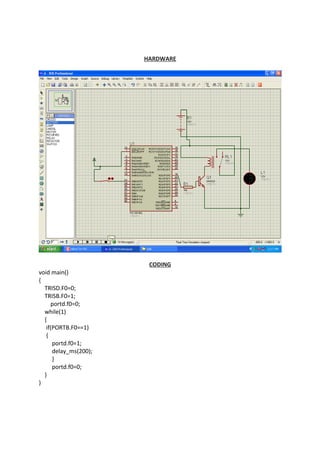
CODING
#define LED PORTC
int j=0;
int i=0;
void main()
{
unsigned char LD[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
TRISC=0;
LED=0;
while(1)
{
for(i=0;i<10;i++)
{
LED=LD[i];
delay_ms(200);
}
}
}
input byte of data in MC at Rb0 serially one bit at a time. LSB should come first
CODING
#define pb0 portb.f0
void main()
{
unsigned char x;
unsigned char assign=0;
trisb.f0=1;
trisd=0;
for(x=0;x<8;x++)
{
assign=assign>>1;
assign=(pb0 & 0x01)<<7;
}
portd=assign;
}](https://image.slidesharecdn.com/finalmicro-130902012702-phpapp01/85/22-microcontroller-programs-1-320.jpg)
![Interface 7 Segment with MC. Display the number from 0-9 on 7 Segment
CODING
#define LED PORTC
int j=0;
int i=0;
void main()
{
unsigned char LD[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
TRISC=0;
LED=0;
while(1)
{
for(i=0;i<10;i++)
{
LED=LD[i];
delay_ms(200);
}
}
}
input byte of data in MC at Rb0 serially one bit at a time. LSB should come first
CODING
#define pb0 portb.f0
void main()
{
unsigned char x;
unsigned char assign=0;
trisb.f0=1;
trisd=0;
for(x=0;x<8;x++)
{
assign=assign>>1;
assign=(pb0 & 0x01)<<7;
}
portd=assign;
}](https://image.slidesharecdn.com/finalmicro-130902012702-phpapp01/75/22-microcontroller-programs-1-2048.jpg)



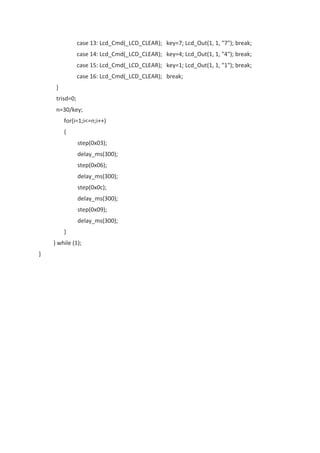

The document contains several code examples for interfacing microcontrollers with various hardware components: 1. Code to display numbers 0-9 on a 7-segment display by setting the ports of a microcontroller. 2. Code to read a byte of data from a microcontroller pin serially and store in a variable. 3. Code to control the direction of a stepper motor by setting the states of driver pins. 4. Additional code examples for reading inputs, controlling relays, temperature monitoring, and interfacing a stepper motor with a keypad and LCD display.