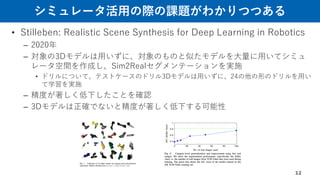
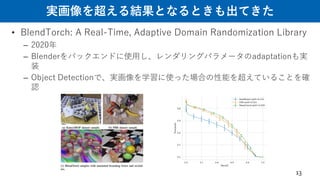
(古典)論文①
• Domain Randomizationfor Transferring Deep Neural Networks
from Simulation to the Real World
– 2017年
– Domain Randomization(シミュレータで現実世界を包含するような多様な環
境を作成し、現実世界のタスクに汎化することを目指す)が初めて(?)単語
として出た論文
– 机の上の座標系に置いて、目標の物体の位置を返すCNNを学習する
3
4.
(古典)論文②
• CAD2RL: RealSingle-Image Flight Without a Single Real Image
– 2016年
– シミュレータ環境内で学習によりdroneのナビゲーション方策を獲得し、獲得
した方策を現実世界に転移
4
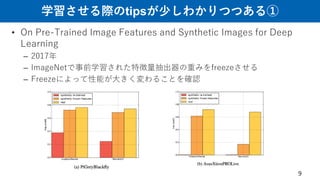
学習させる際のtipsが少しわかりつつある①
• On Pre-TrainedImage Features and Synthetic Images for Deep
Learning
– 2017年
– ImageNetで事前学習された特徴量抽出器の重みをfreezeさせる
– Freezeによって性能が大きく変わることを確認
9
![1
DEEP LEARNING JP
[DL Papers]
http://deeplearning.jp/
画像を使ったSim2Realの現況
Reiji Hatsugai, DeepX](https://image.slidesharecdn.com/imagesim2real-201030025320/85/DL-Sim2Real-1-320.jpg)
![1
DEEP LEARNING JP
[DL Papers]
http://deeplearning.jp/
画像を使ったSim2Realの現況
Reiji Hatsugai, DeepX](https://image.slidesharecdn.com/imagesim2real-201030025320/75/DL-Sim2Real-1-2048.jpg)







![[DL輪読会]Set Transformer: A Framework for Attention-based Permutation-Invariant...](https://cdn.slidesharecdn.com/ss_thumbnails/20200221settransformer-200221020423-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]DropBlock: A regularization method for convolutional networks](https://cdn.slidesharecdn.com/ss_thumbnails/dlyokota20190222-190222002832-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)







![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing](https://cdn.slidesharecdn.com/ss_thumbnails/glide2-220107030326-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination](https://cdn.slidesharecdn.com/ss_thumbnails/20200313furutav2-200313025657-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]Swin Transformer: Hierarchical Vision Transformer using Shifted Windows](https://cdn.slidesharecdn.com/ss_thumbnails/swintransformer-210514020542-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]相互情報量最大化による表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/20190913iwasawa-190913002312-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会] Learning from Simulated and Unsupervised Images through Adversarial T...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks1708281-170907071224-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Imagination-Augmented Agents for Deep Reinforcement Learning / Learnin...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacksshioya201707281-170728054152-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]CartoonGAN: Generative Adversarial Networks for Photo Cartoonization](https://cdn.slidesharecdn.com/ss_thumbnails/180622cartoongan1-180628035926-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会] GAN系の研究まとめ (NIPS2016とICLR2016が中心)](https://cdn.slidesharecdn.com/ss_thumbnails/dliwasawagansurvey-161220014753-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]Flow-based Deep Generative Models](https://cdn.slidesharecdn.com/ss_thumbnails/20190307-190328024744-thumbnail.jpg?width=640&height=640&fit=bounds)




















