Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Kensei Demura
PPTX, PDF
450 views
FutureKreateロボットシミュレータ
つくばチャレンジ2020 LT大会で発表した資料です。
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 18
2
/ 18
3
/ 18
4
/ 18
5
/ 18
6
/ 18
7
/ 18
8
/ 18
9
/ 18
10
/ 18
11
/ 18
12
/ 18
13
/ 18
14
/ 18
15
/ 18
16
/ 18
17
/ 18
18
/ 18
More Related Content
PDF
Choreonoid+ros
by
独立行政法人 産業技術総合研究所
PPTX
現実世界コンピューティング RealSense とロボットと HoloLens (2019/04/24 Intel RealSense Japan Mee...
by
Yusuke Furuta
PDF
Moveitを使ったアプリケーションの紹介
by
Ryodo Tanaka
ODP
Hacking Robotics
by
Kensei Demura
PDF
【Unity道場 4月 ~アーティストの為のPBR再入門~】アーティストの為のPBR再入門
by
Unity Technologies Japan K.K.
PDF
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
PDF
20130615 組込みの仕事場でRubyを使う
by
Ryo Nagai
PPTX
モバイルディスプレイ
by
m ishizaki
Choreonoid+ros
by
独立行政法人 産業技術総合研究所
現実世界コンピューティング RealSense とロボットと HoloLens (2019/04/24 Intel RealSense Japan Mee...
by
Yusuke Furuta
Moveitを使ったアプリケーションの紹介
by
Ryodo Tanaka
Hacking Robotics
by
Kensei Demura
【Unity道場 4月 ~アーティストの為のPBR再入門~】アーティストの為のPBR再入門
by
Unity Technologies Japan K.K.
第1回ROS勉強会発表資料 ROS+Gazeboではじめるロボットシミュレーション
by
akio19937
20130615 組込みの仕事場でRubyを使う
by
Ryo Nagai
モバイルディスプレイ
by
m ishizaki
What's hot
PDF
ビーズセッターロボットのためのDYNAMIXEL Workbenchの評価
by
Hirokazu Onomichi
PDF
myCobotがある生活
by
Ryo Kabutan
PDF
Pythonによる4足歩行ロボットの制御と強化学習による歩行動作獲得の実例 #pyconjp
by
Hideyuki TAKEI
PDF
ROS JAPAN Users Group Meetup 03
by
Daiki Maekawa
PDF
ROSのロボットモデルでバーチャルロボット受肉する
by
UnityTechnologiesJapan002
PDF
Unity道場 ロボティクス 秋のLT祭り 2021
by
Ryo Kabutan
PDF
Golang, make and robotics #gocon
by
Hideyuki TAKEI
PPTX
roslaunch test + industrial_ci
by
Ryodo Tanaka
PPTX
Swift (with SceneKit) で簡単な3Dゲームを作ってみた
by
Kazuya Hiruma
PDF
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
PDF
「VRChatのクリエイター文化の話」坪倉輝明
by
Teruaki Tsubokura
PPTX
Unity/CSharp 2
by
tagawakiyoshi
PDF
ABC2013 Spring デザインナーとエンジニアの連携プレイのコツ
by
Mori Keita
PDF
第5回 ニコニコ学会β 研究してみたマッドネス Mont Blanc Pj.(レゴへのプロジェクションマッピング)
by
hecomi
PPTX
C# Tokyo コミュニティ案内
by
m ishizaki
PPTX
Raspberry pi 3を使ってみてあれこれ
by
Lina Katayose
PDF
Yidev201406.pub
by
itoz itoz
PPTX
C# Tokyo コミュニティについて Short 版
by
m ishizaki
PPTX
リモートワークで10kgダイエットした話
by
Masaki Suzuki
PDF
モーションコントロールコンテンツの実装から見えて来た事
by
Naoji Taniguchi
ビーズセッターロボットのためのDYNAMIXEL Workbenchの評価
by
Hirokazu Onomichi
myCobotがある生活
by
Ryo Kabutan
Pythonによる4足歩行ロボットの制御と強化学習による歩行動作獲得の実例 #pyconjp
by
Hideyuki TAKEI
ROS JAPAN Users Group Meetup 03
by
Daiki Maekawa
ROSのロボットモデルでバーチャルロボット受肉する
by
UnityTechnologiesJapan002
Unity道場 ロボティクス 秋のLT祭り 2021
by
Ryo Kabutan
Golang, make and robotics #gocon
by
Hideyuki TAKEI
roslaunch test + industrial_ci
by
Ryodo Tanaka
Swift (with SceneKit) で簡単な3Dゲームを作ってみた
by
Kazuya Hiruma
建設シミュレータOCSの開発 / OCS・VTC on Unity におけるROS対応機能について
by
UnityTechnologiesJapan002
「VRChatのクリエイター文化の話」坪倉輝明
by
Teruaki Tsubokura
Unity/CSharp 2
by
tagawakiyoshi
ABC2013 Spring デザインナーとエンジニアの連携プレイのコツ
by
Mori Keita
第5回 ニコニコ学会β 研究してみたマッドネス Mont Blanc Pj.(レゴへのプロジェクションマッピング)
by
hecomi
C# Tokyo コミュニティ案内
by
m ishizaki
Raspberry pi 3を使ってみてあれこれ
by
Lina Katayose
Yidev201406.pub
by
itoz itoz
C# Tokyo コミュニティについて Short 版
by
m ishizaki
リモートワークで10kgダイエットした話
by
Masaki Suzuki
モーションコントロールコンテンツの実装から見えて来た事
by
Naoji Taniguchi
Similar to FutureKreateロボットシミュレータ
PDF
ヒューマノイドのアプリ開発とモーション生成AIの導入 ROS JP UG #51
by
holypong
PDF
NEDO特別講座_画像処理・AI技術活用コース_前編
by
NEDOROBOMARC
PDF
ROSによる今後のロボティクスのあり方
by
Mori Ken
PDF
産業用ロボットにおけるUnityとAI技術の活用
by
aicube inc.
PDF
東北大学講義資料 実世界における自然言語処理 - すべての人にロボットを - 坪井祐太
by
Preferred Networks
PDF
AIのラボからロボティクスへ --- 東大松尾研究室のWRS2020パートナーロボットチャレンジへの挑戦
by
Tatsuya Matsushima
PPTX
AI robot car
by
Akira Sasaki
PDF
BridgePointを使ったモデル駆動開発(ETロボコン環境のご紹介)
by
Yuki Tsuchitoi
PPTX
RCカーを用いた自動運転車両シミュレーション環境に関する研究
by
harmonylab
PDF
Virtual Tsukuba Challenge on Unity について
by
UnityTechnologiesJapan002
PDF
[DL輪読会]画像を使ったSim2Realの現況
by
Deep Learning JP
PPTX
第4回瀬戸内ROS勉強会LT資料
by
NaotakaKawata
PPTX
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
PDF
NEDO特別講座_画像処理・AI技術活用コース_後編
by
NEDOROBOMARC
PPTX
ROScon 2017 参加報告
by
Yutaro ISHIDA
PDF
Robomec2014 rtm講習会第1部(その1)
by
openrtm
PDF
VTC: Virtual Tsukuba Challenge
by
Tomoaki Yoshida
PDF
Virtual Tsukuba Challenge on Unity について
by
Ryodo Tanaka
PPTX
Japan Robot Week 2016 RTM講習会 第1部
by
Noriaki Ando
PPTX
2020 08-01 ALGYAN AI&ロボティクス (1)
by
Akira Tateishi
ヒューマノイドのアプリ開発とモーション生成AIの導入 ROS JP UG #51
by
holypong
NEDO特別講座_画像処理・AI技術活用コース_前編
by
NEDOROBOMARC
ROSによる今後のロボティクスのあり方
by
Mori Ken
産業用ロボットにおけるUnityとAI技術の活用
by
aicube inc.
東北大学講義資料 実世界における自然言語処理 - すべての人にロボットを - 坪井祐太
by
Preferred Networks
AIのラボからロボティクスへ --- 東大松尾研究室のWRS2020パートナーロボットチャレンジへの挑戦
by
Tatsuya Matsushima
AI robot car
by
Akira Sasaki
BridgePointを使ったモデル駆動開発(ETロボコン環境のご紹介)
by
Yuki Tsuchitoi
RCカーを用いた自動運転車両シミュレーション環境に関する研究
by
harmonylab
Virtual Tsukuba Challenge on Unity について
by
UnityTechnologiesJapan002
[DL輪読会]画像を使ったSim2Realの現況
by
Deep Learning JP
第4回瀬戸内ROS勉強会LT資料
by
NaotakaKawata
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
NEDO特別講座_画像処理・AI技術活用コース_後編
by
NEDOROBOMARC
ROScon 2017 参加報告
by
Yutaro ISHIDA
Robomec2014 rtm講習会第1部(その1)
by
openrtm
VTC: Virtual Tsukuba Challenge
by
Tomoaki Yoshida
Virtual Tsukuba Challenge on Unity について
by
Ryodo Tanaka
Japan Robot Week 2016 RTM講習会 第1部
by
Noriaki Ando
2020 08-01 ALGYAN AI&ロボティクス (1)
by
Akira Tateishi
More from Kensei Demura
PPTX
Development of human support robot
by
Kensei Demura
PPTX
ロボカップ世界大会報告@IPAセキュリティキャンプ全国大会2016チューター成果報告
by
Kensei Demura
PPTX
7・27ランチ自己紹介2015
by
Kensei Demura
PPTX
Happy Robot Mini
by
Kensei Demura
PPTX
Robot upgrade school to SICTIC2013
by
Kensei Demura
PPTX
ロボカップジュニア自由研究2011
by
Kensei Demura
DOCX
賢聖自律型ロボットの開発2012
by
Kensei Demura
DOC
ロボカップジュニア日本大会提出論文(出村賢聖)140317
by
Kensei Demura
PPTX
Connecting Virtual to Real Robot with SIGVerse Robot Simulator
by
Kensei Demura
ODP
Robots I made in Robocup
by
Kensei Demura
ODP
Robots I made in Robocup
by
Kensei Demura
PDF
RoboCup@home SPL Technical league intro
by
Kensei Demura
PDF
Dream slush
by
Kensei Demura
PDF
生活支援ロボットMini@ROS勉強会
by
Kensei Demura
PDF
新型Happy Miniの発表 @ RoboCup 2017 NVIDIA 展示ブース
by
Kensei Demura
ODP
KANAZAWAスマホアプリコンテスト企画書
by
Kensei Demura
PPTX
Kensei sictic2012
by
Kensei Demura
PPTX
賢聖プレゼンSictic2013
by
Kensei Demura
PPTX
RobocupJunior summercamp
by
Kensei Demura
PPTX
ノダチュウポスター2011
by
Kensei Demura
Development of human support robot
by
Kensei Demura
ロボカップ世界大会報告@IPAセキュリティキャンプ全国大会2016チューター成果報告
by
Kensei Demura
7・27ランチ自己紹介2015
by
Kensei Demura
Happy Robot Mini
by
Kensei Demura
Robot upgrade school to SICTIC2013
by
Kensei Demura
ロボカップジュニア自由研究2011
by
Kensei Demura
賢聖自律型ロボットの開発2012
by
Kensei Demura
ロボカップジュニア日本大会提出論文(出村賢聖)140317
by
Kensei Demura
Connecting Virtual to Real Robot with SIGVerse Robot Simulator
by
Kensei Demura
Robots I made in Robocup
by
Kensei Demura
Robots I made in Robocup
by
Kensei Demura
RoboCup@home SPL Technical league intro
by
Kensei Demura
Dream slush
by
Kensei Demura
生活支援ロボットMini@ROS勉強会
by
Kensei Demura
新型Happy Miniの発表 @ RoboCup 2017 NVIDIA 展示ブース
by
Kensei Demura
KANAZAWAスマホアプリコンテスト企画書
by
Kensei Demura
Kensei sictic2012
by
Kensei Demura
賢聖プレゼンSictic2013
by
Kensei Demura
RobocupJunior summercamp
by
Kensei Demura
ノダチュウポスター2011
by
Kensei Demura
Recently uploaded
PDF
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
FutureKreateロボットシミュレータ
1.
FutureKreateシミュレータ
2.
出村 賢聖 ~2013 :
RoboCup Junior 2014 : RoboCup@Home Simulation 2014: つくばチャレンジ初走行 2016 : つくばチャレンジ二回目 2015-2017 : RoboCup@Home 2018 : World Robot Summit 2019 ~ : e-spots大会出場
3.
オープンワールドゲーム技術を 利用した大規模エリアロボット シミュレータ
4.
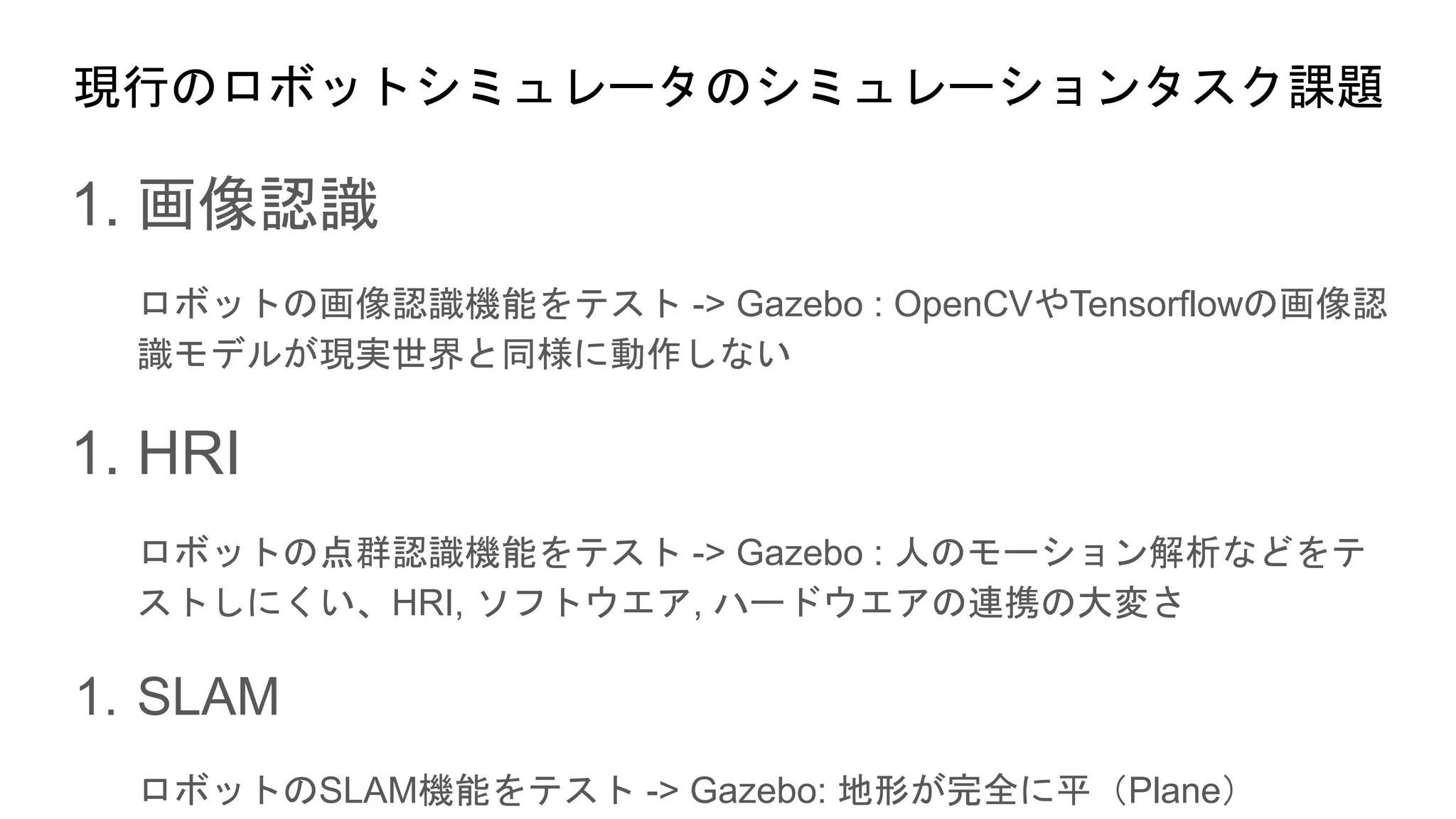
現行のロボットシミュレータのシミュレーションタスク課題 1. 画像認識 ロボットの画像認識機能をテスト ->
Gazebo : OpenCVやTensorflowの画像認 識モデルが現実世界と同様に動作しない 1. HRI ロボットの点群認識機能をテスト -> Gazebo : 人のモーション解析などをテ ストしにくい、HRI, ソフトウエア, ハードウエアの連携の大変さ 1. SLAM ロボットのSLAM機能をテスト -> Gazebo: 地形が完全に平(Plane)
5.
画像認識の解決法 : Unity/Unreal 最新のゲームエンジンを使う
: DX11/Vulkan 光をルーメン単位で、現実の光に即した逆二乗の法則でシミュレーショ ン可能 Unity + ROS + TensorflowでYOLO9000が動作 UnityのROS連携:SIGVerse, ROS#, WebSocket(ROSBridge)
6.
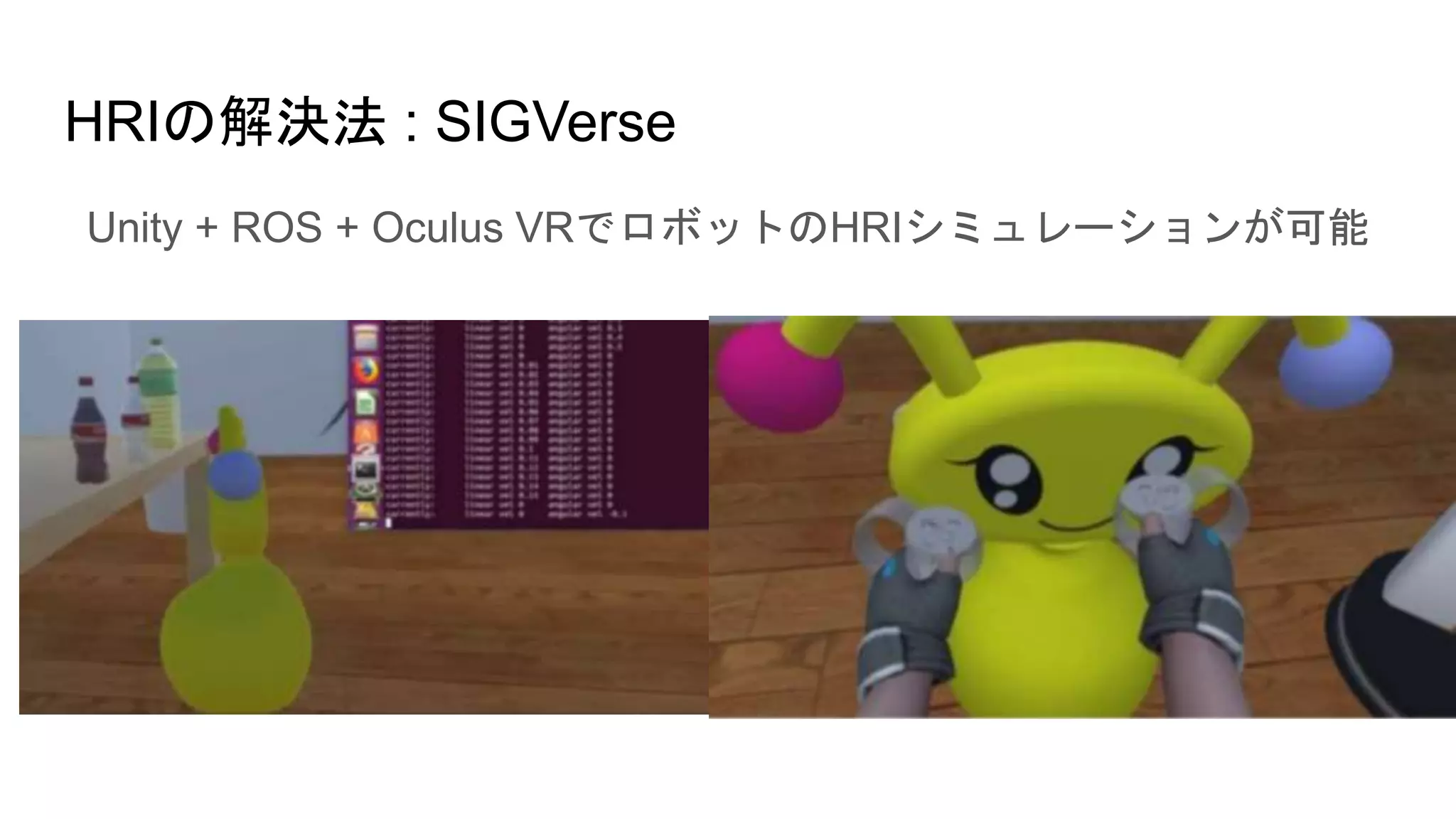
HRIの解決法 : SIGVerse Unity
+ ROS + Oculus VRでロボットのHRIシミュレーションが可能
7.
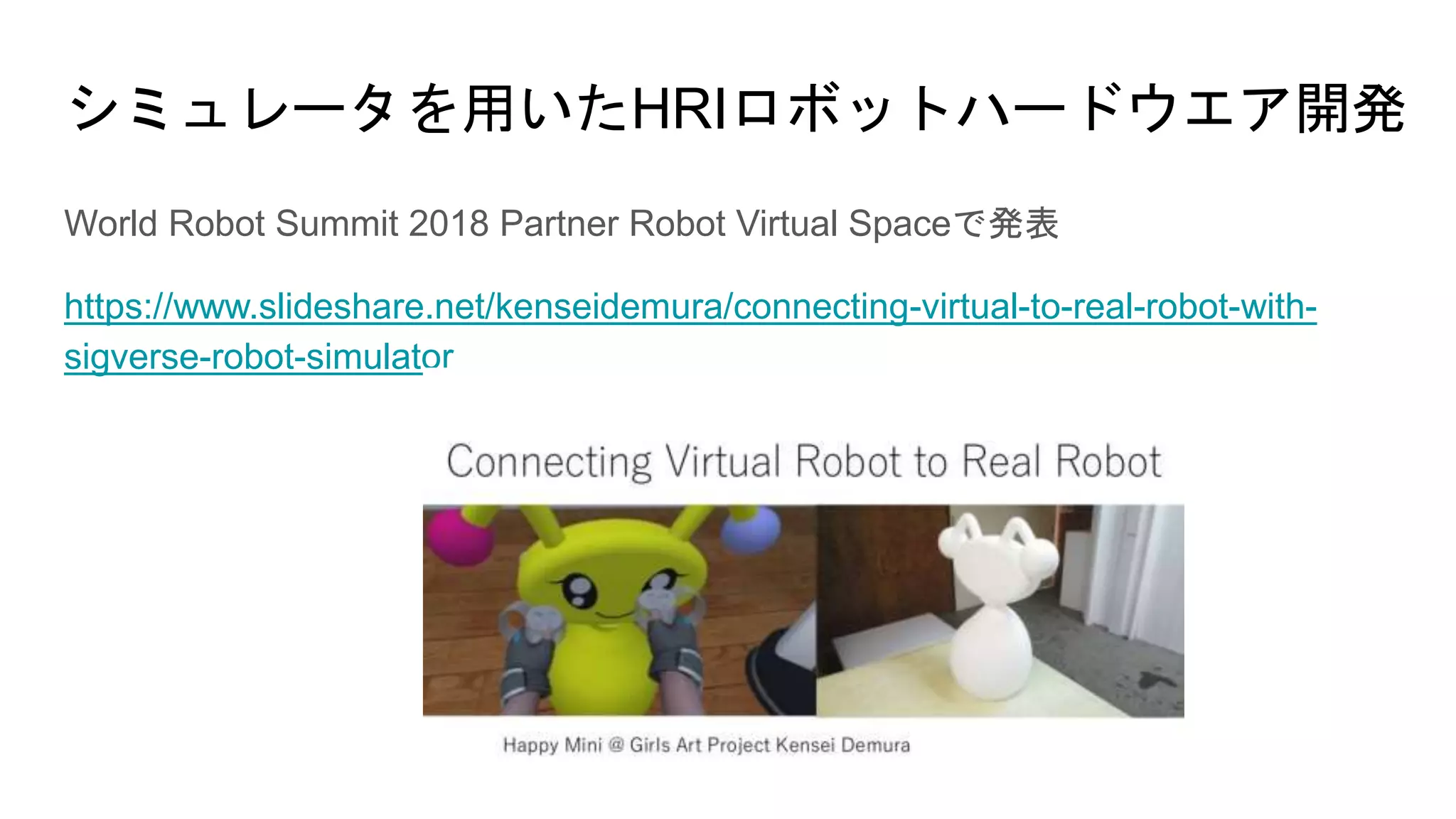
シミュレータを用いたHRIロボットハードウエア開発 World Robot Summit
2018 Partner Robot Virtual Spaceで発表 https://www.slideshare.net/kenseidemura/connecting-virtual-to-real-robot-with- sigverse-robot-simulator
8.
SLAMの解決法:なし(rosbag) 地形データ(Mapbox / WRLD
SDK/ OSM API) : 精度が荒かったり、日本のデータ が少ない場合がある 建築データ/BIM : オープンな3D建築データが非常に少なく、間取り図は人間が読 むために作られているため情報抽出が非常に大変 3Dスキャン・Photogrammetry : rosbagで十分 大規模エリア(1km^2以上)の走行シミュレーションが難しい アスファルトのゆがみ・段差等を考慮した現実の地形の走行シミュレーションが できない(平な)
9.
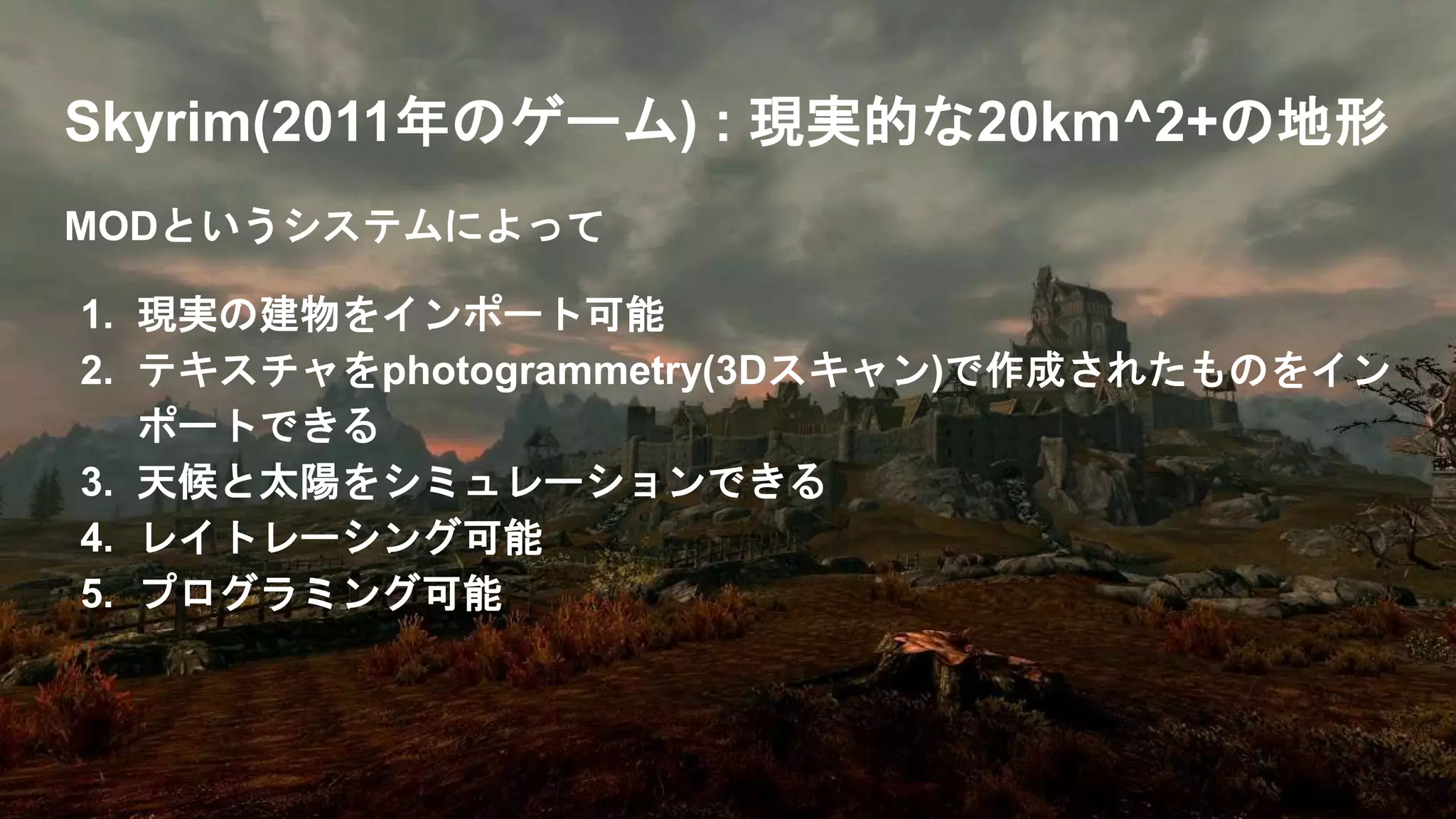
Skyrim(2011年のゲーム) : 現実的な20km^2+の地形 MODというシステムによって 1.
現実の建物をインポート可能 2. テキスチャをphotogrammetry(3Dスキャン)で作成されたものをイン ポートできる 3. 天候と太陽をシミュレーションできる 4. レイトレーシング可能 5. プログラミング可能
10.
案1 : ゲームにMODとしてROSとロボットモデルを 入れる 問題:ゲーム用の3Dモデル形式が特殊(nif)でCADモデルをメッシュモデルに変換 しただけではゲームにインポート不可能、プログラミング言語が独自言語 (Papyrus)
11.
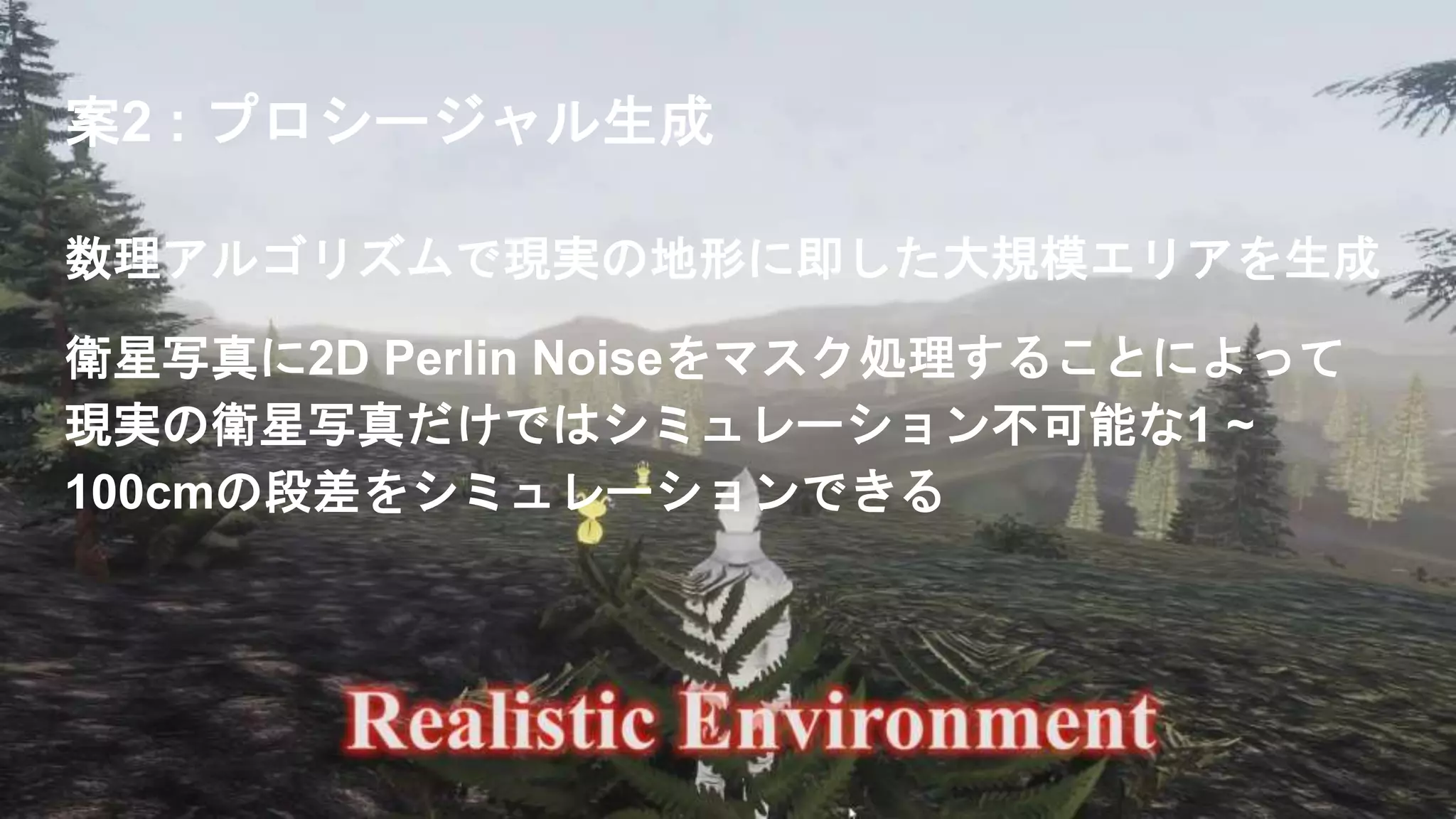
案2 : プロシージャル生成 数理アルゴリズムで現実の地形に即した大規模エリアを生成 衛星写真に2D
Perlin Noiseをマスク処理することによって 現実の衛星写真だけではシミュレーション不可能な1 ~ 100cmの段差をシミュレーションできる
12.
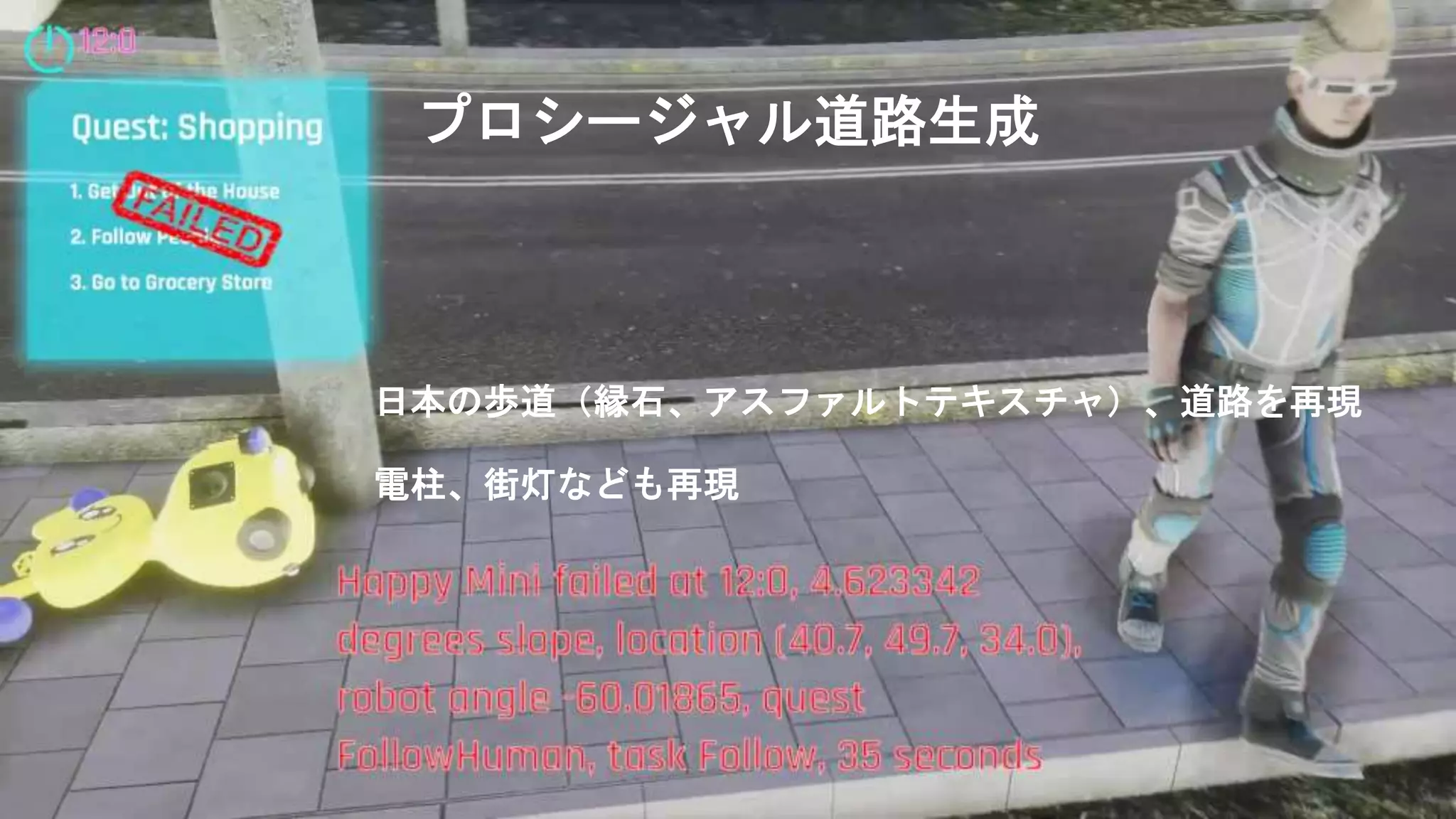
プロシージャル道路生成 日本の歩道(縁石、アスファルトテキスチャ)、道路を再現 電柱、街灯なども再現
13.
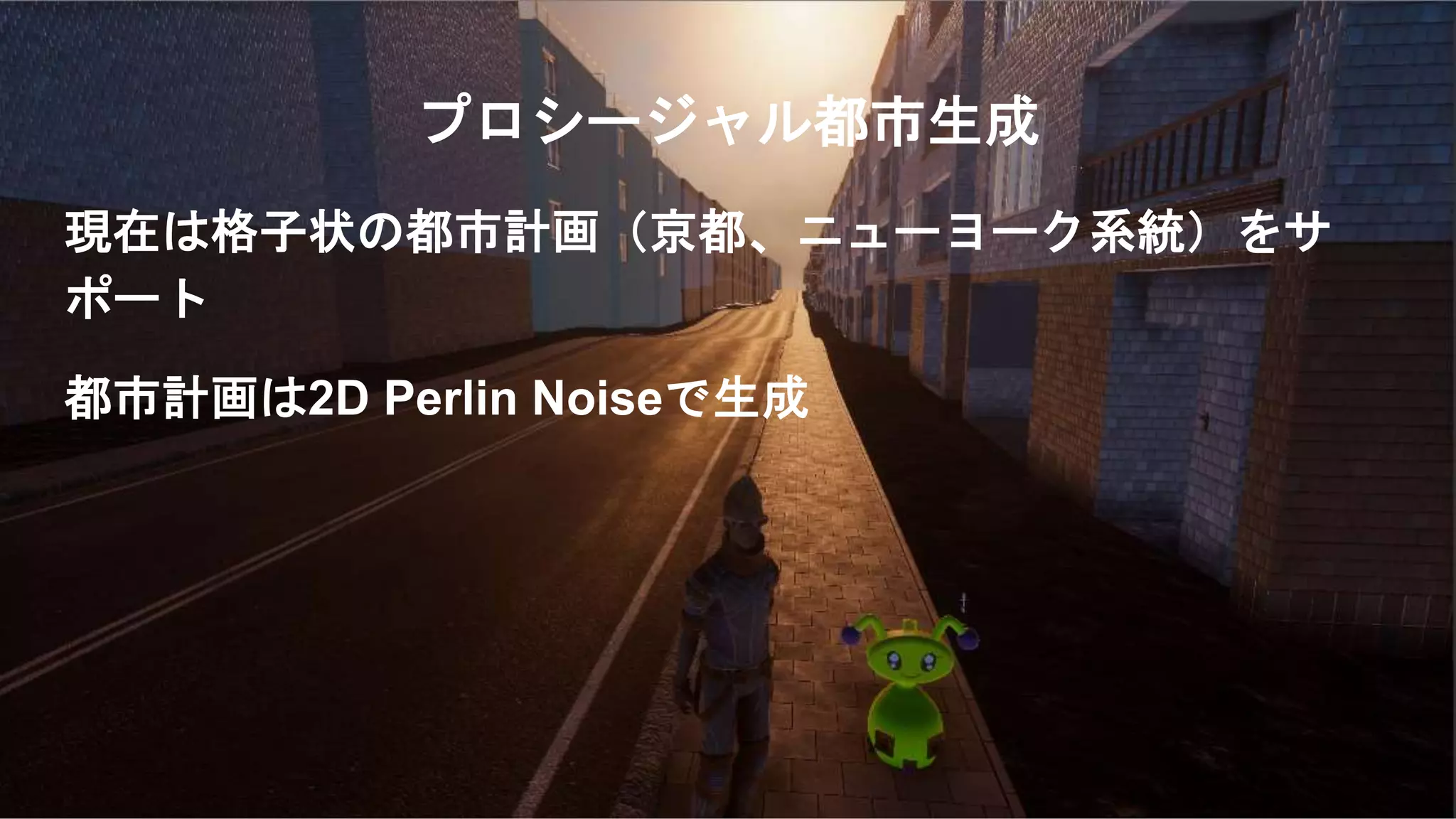
プロシージャル都市生成 現在は格子状の都市計画(京都、ニューヨーク系統)をサ ポート 都市計画は2D Perlin Noiseで生成
14.
プロシージャル石・落ち葉配置 2D Perlin Noiseで配置 石の直径は1
~ 10cmでランダム
15.
シミュレータ上のロボットの設定 アプリケーション単体でセンサ・通信設定を行える (ビルド・configファイル作成不要)
16.
サポートしているロボットAPI 1. ROS 2. EV3RT/Athrill(レゴ):mmap通信とデバッガを用いるこ とによって、組み込みプロセッサの挙動をアセンブラレ ベルで物理法則シミュレーションごとステップ実行でき る
17.
現状の課題 ・Google Maps APIでベース地形を生成しようとすると4km^2で6万円請求される ->
マップAPIの代替 ・CADモデルを簡易的に3Dモデルに変換できない(fusion360 CADユーザーのみ対 応) -> URDFインポーターの開発 ・UnityのNVIDIA PhyXがCADの拘束条件を記述できない -> 物理エンジンの代替 ・道路ネットワークのランタイム読み込み・プロシージャル生成
18.
FutureKreateの要望お待ちしています! https://forms.gle/quEnYMay8q14k3X4A facebookページ : https://www.facebook.com/futurekreate
Download










































![[DL輪読会]画像を使ったSim2Realの現況](https://cdn.slidesharecdn.com/ss_thumbnails/imagesim2real-201030025320-thumbnail.jpg?width=640&height=640&fit=bounds)


































