【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks for 3D Point Cloud Analysis
1.
http://deeplearning.jp/
“Parameter is NotAll You Need:
Starting from Non-Parametric Networks for 3D Point
Cloud Analysis” 東京大学工学系研究科 稲富翔伍
DEEP LEARNING JP
[DL Papers]
2023/07/07
1
2.
2023/07/07
2
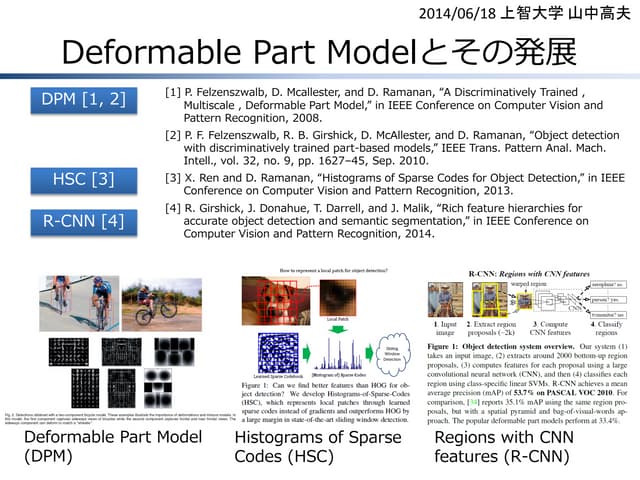
書誌情報
1.Intro
論文名 Parameter isNot All You Need: Starting from Non-Parametric
Networks for 3D Point Cloud Analysis
著者 Renrui Zhang, Liuhui Wang, Ziyu Guo, Yali Wang, Peng Gao, Hongsheng
Li, Jianbo Shi
投稿 CVPR2023
https://arxiv.org/abs/2303.08134
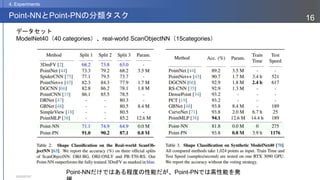
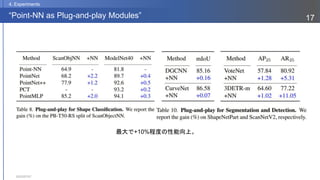
概要 • 点群の分類・セグメンテーション・物体検出タスクを、学習パラメータ
なしで解く手法 Point-NNを提案
• PointNet++やPointCNN等の手法よりも高い性能
• Point-NNをベースに少量の学習パラメータを加えることでより高い性
能を発揮
選定理由 点群解析手法について気になっている。
点群周りでCVPRでどのような論文があるのか。
タイトルにインパクトがあった。
2023/07/07
6
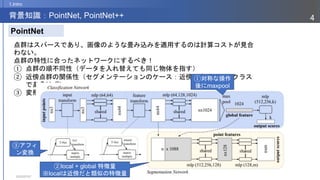
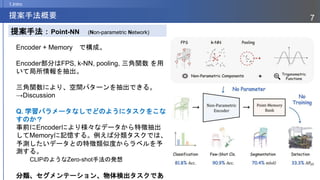
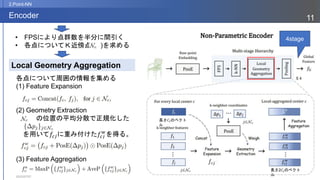
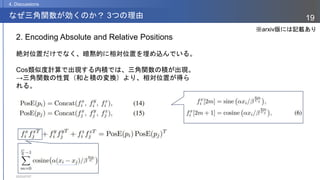
点群の処理
1.Intro
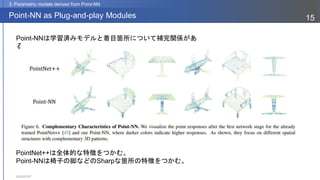
学習可能モジュール以外のノンパラメトリックモジュールはPointNet++からあまり変化
していない。
farthest point sampling(FPS)
ダウンサンプル(間引く)手法。サンプル点の距離(物体の形状)に着目する。
例えばランダムサンプリングでは密度の偏りの影響を受けるが、FPSは空間的に一様に
サンプルできる。
(レーザースキャンでは、スキャナーに近いほど取得される点群の密度が高いという偏
りがある)
k-Nearest Neighbors (k-NN)
中心点(着目する点)に1番目~k番目に近い点を取得する関数。
pooling operations
Max pooling やAverage pooling
ノンパラメトリックモ
ジュール
課題感
Can we achieve high 3D point cloud analysis performance using only these non-parametric
components?
![http://deeplearning.jp/
“Parameter is Not All You Need:
Starting from Non-Parametric Networks for 3D Point
Cloud Analysis” 東京大学工学系研究科 稲富翔伍
DEEP LEARNING JP
[DL Papers]
2023/07/07
1](https://image.slidesharecdn.com/230707pointcloud-230707080457-32bb4c2c/85/DL-Parameter-is-Not-All-You-Need-Starting-from-Non-Parametric-Networks-for-3D-Point-Cloud-Analysis-1-320.jpg)
![http://deeplearning.jp/
“Parameter is Not All You Need:
Starting from Non-Parametric Networks for 3D Point
Cloud Analysis” 東京大学工学系研究科 稲富翔伍
DEEP LEARNING JP
[DL Papers]
2023/07/07
1](https://image.slidesharecdn.com/230707pointcloud-230707080457-32bb4c2c/75/DL-Parameter-is-Not-All-You-Need-Starting-from-Non-Parametric-Networks-for-3D-Point-Cloud-Analysis-1-2048.jpg)

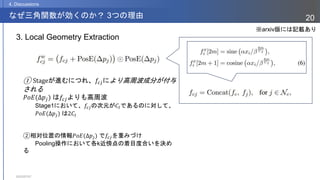
![2023/07/07
3
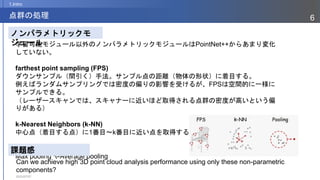
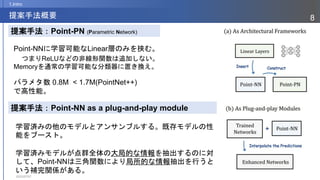
点群の処理
1.Intro
• 画像と異なるデータ形式
• 密度の偏り
• 順不同性
• その他回転並進不変性やノイズなど特有の課題が
ある
点群処理の難しさ
先行手法
Pointcloud data1
[x,y,z]
[0,0,1]
[1,1,1]
[1,3,2]
…
Pointcloud data2
[x,y,z]
[0,0,1]
[1,3,2]
[1,1,1]
…
=
パラメタ数
PointNet++ 1.7M
KPConv 14.3M
PointMLP 12.6M
PointNet++以降、local operator(畳み込み等の局所的な特徴抽出機構)や学習可能パラメタ数の増加と
いった工夫がなされる。
課題:計算コスト
データの順番を変えても意味は同
じ](https://image.slidesharecdn.com/230707pointcloud-230707080457-32bb4c2c/85/DL-Parameter-is-Not-All-You-Need-Starting-from-Non-Parametric-Networks-for-3D-Point-Cloud-Analysis-3-320.jpg)


![[DL輪読会]Model soups: averaging weights of multiple fine-tuned models improves ...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0401-220405031053-thumbnail.jpg?width=640&height=640&fit=bounds)








![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]BERT: Pre-training of Deep Bidirectional Transformers for Language Und...](https://cdn.slidesharecdn.com/ss_thumbnails/dlreadingpaper20181019-181019010218-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Revisiting Deep Learning Models for Tabular Data (NeurIPS 2021) 表形式デー...](https://cdn.slidesharecdn.com/ss_thumbnails/dl20220318dlfin-220322065433-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]When Does Label Smoothing Help?](https://cdn.slidesharecdn.com/ss_thumbnails/yokota20191227dl-191227001522-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]相互情報量最大化による表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/20190913iwasawa-190913002312-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...](https://cdn.slidesharecdn.com/ss_thumbnails/181214dlpointnet-181214053349-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]“Spatial Attention Point Network for Deep-learning-based Robust Autono...](https://cdn.slidesharecdn.com/ss_thumbnails/20210729kokiyamane-210730035349-thumbnail.jpg?width=640&height=640&fit=bounds)