【DL輪読会】Code as Policies: Language Model Programs for Embodied Control
1.
DEEP LEARNING JP
[DLPapers]
Code as Policies: Language Model Programs
for Embodied Control
Keno Harada, M2, the University of Tokyo
http://deeplearning.jp/
2.
書誌情報
論文名 Code asPolicies: Language Model Programs for Embodied Control
著者 Jacky Liang, Wenlong Huang, Fei Xia, Peng Xu, Karol Hausman, Brian
Ichter, Pete Florence, Andy Zeng (Robotics at Google)
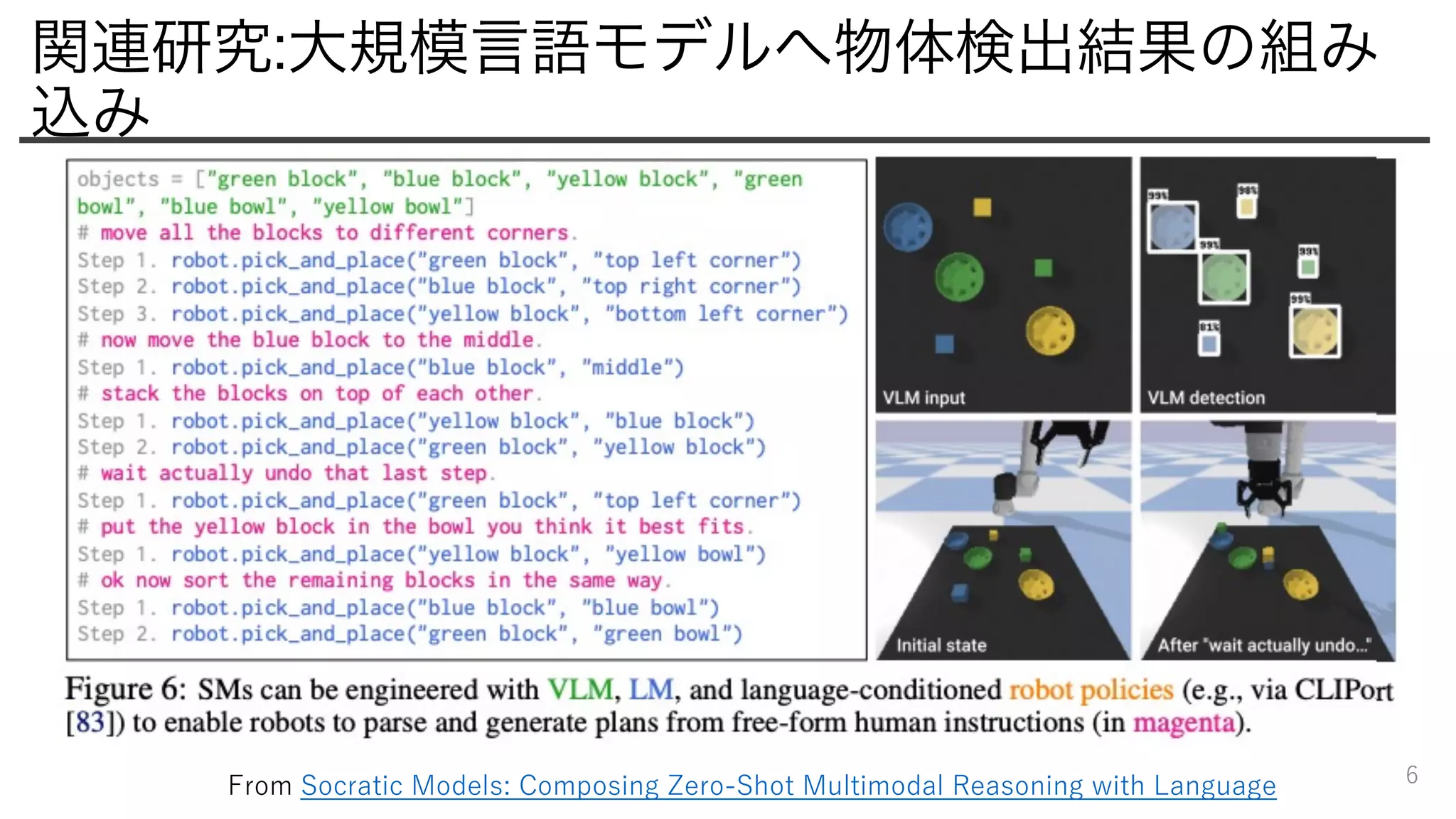
概要 大規模言語モデルによるプログラム生成を用いて、指示文のコメントと小サンプ
ルのプロンプトからロボットの行動方策のプログラムを生成. あらかじめ準備する
行動、認識APIとプロンプト文を工夫することによりPerception-actionのフィー
ドバックループを必要とするようなタスクに応じた行動方策の記述を可能に.
Link https://code-as-policies.github.io/
https://ai.googleblog.com/2022/11/robots-that-write-their-own-
code.html
2
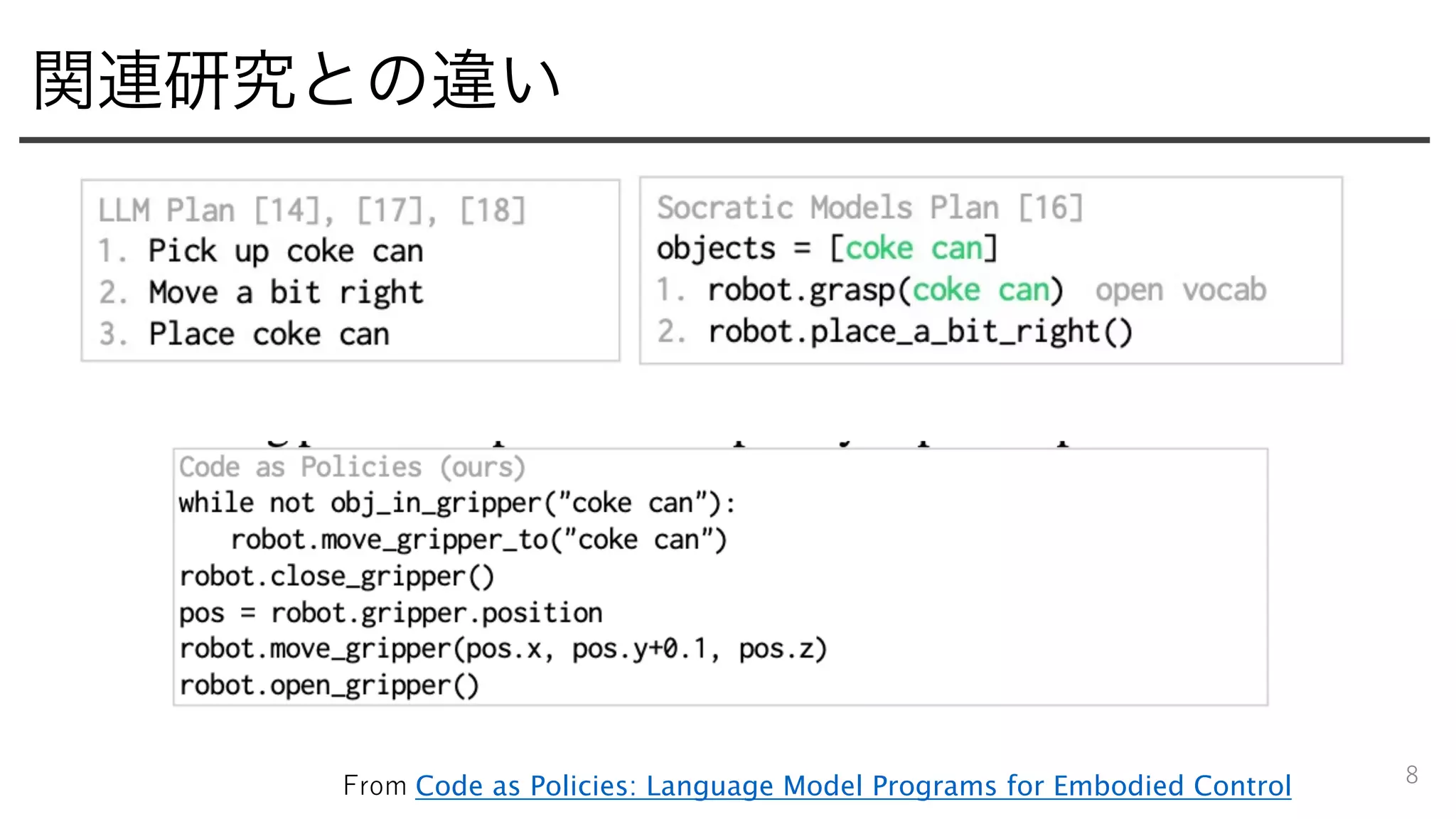
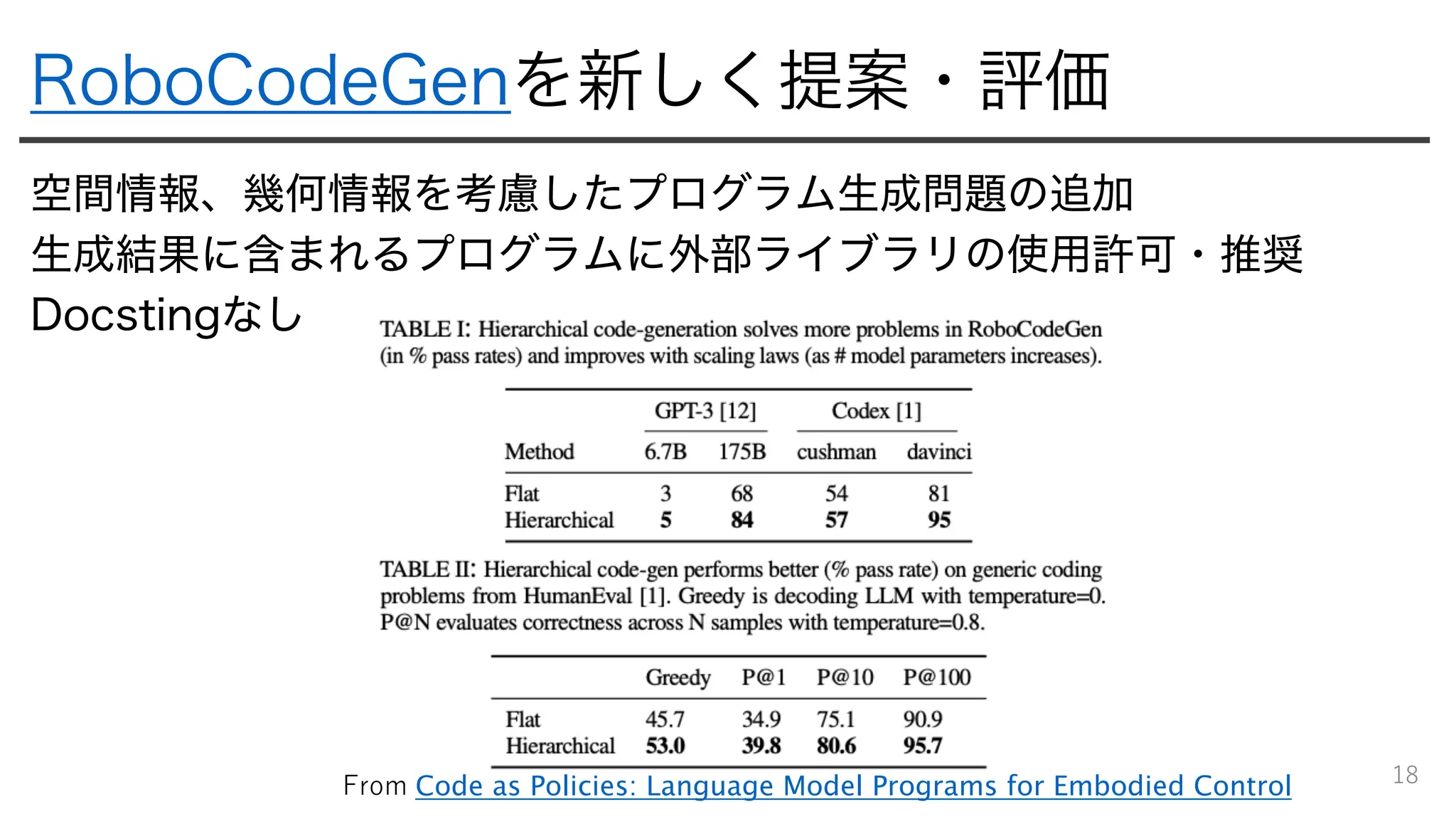
提案手法
• Prompting LanguageModel Programs
- Promptの構成要素
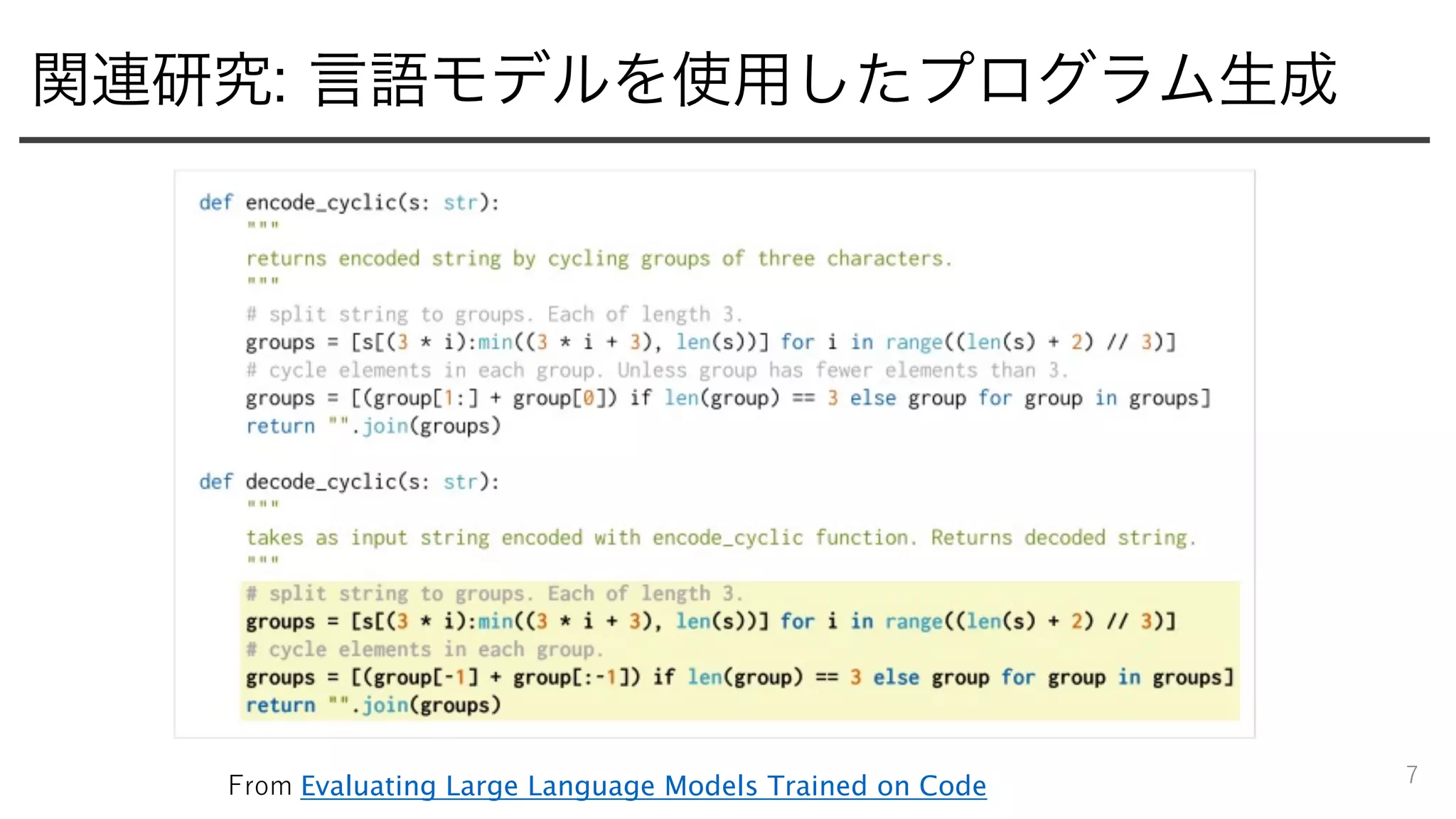
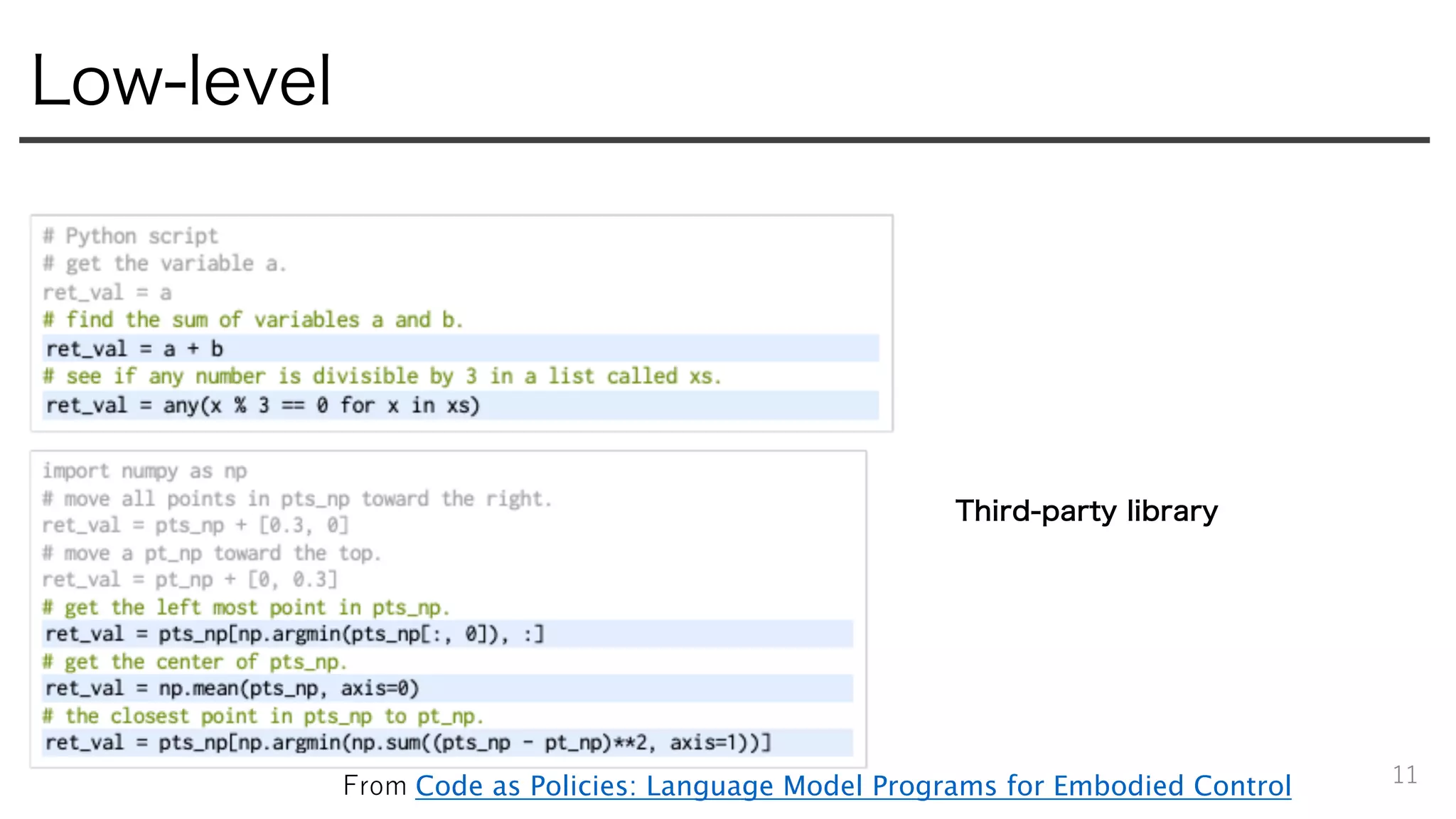
• Example Language Model Programs(Low‒level)
- Code-writing LLMの使用による学習データ中のthird-party library
の使用
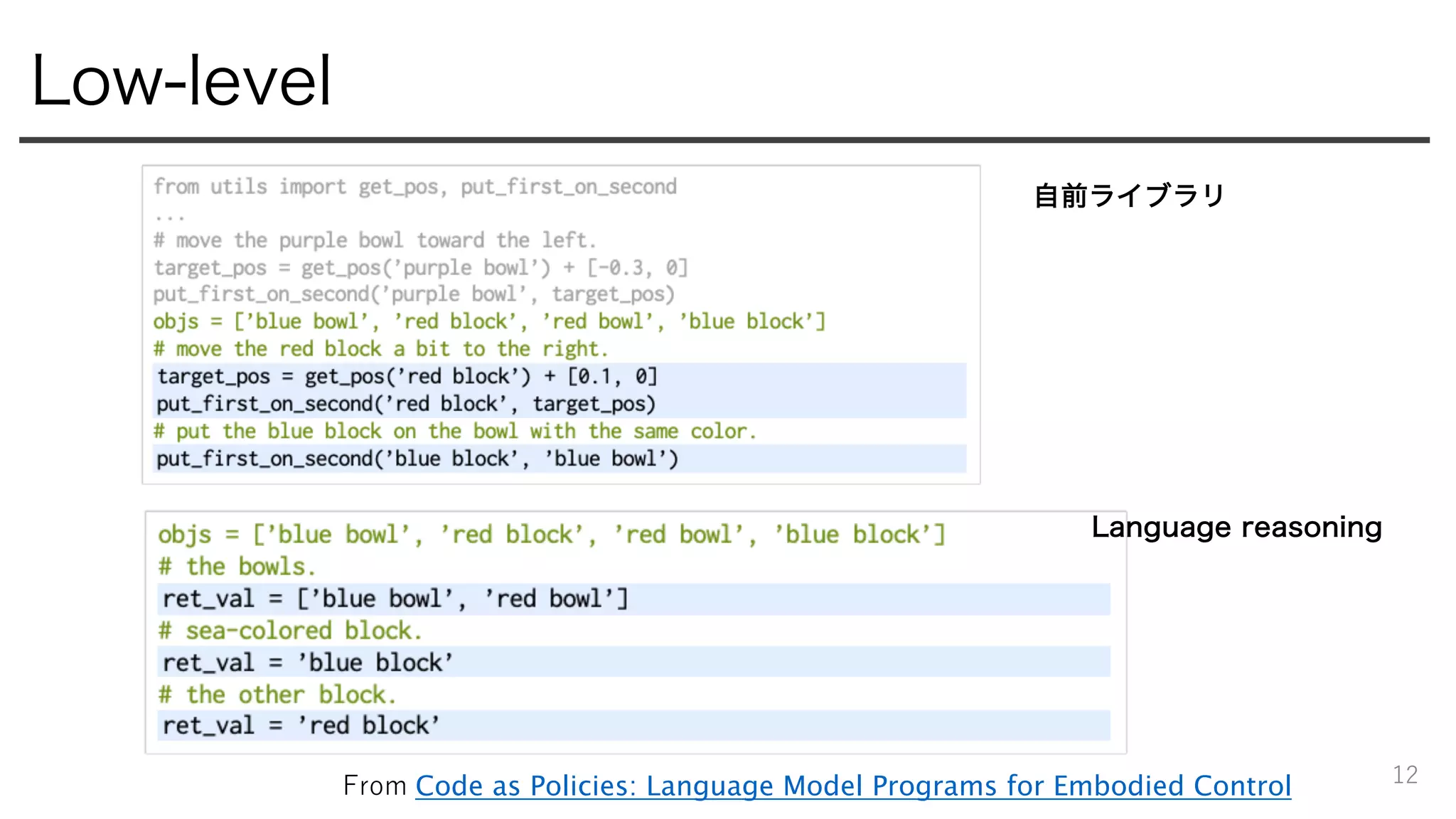
- 関数名の工夫とHint/Examplesの工夫による自前libraryの使用
- タスク指示文とcodeを結びつけるLanguage reasoning
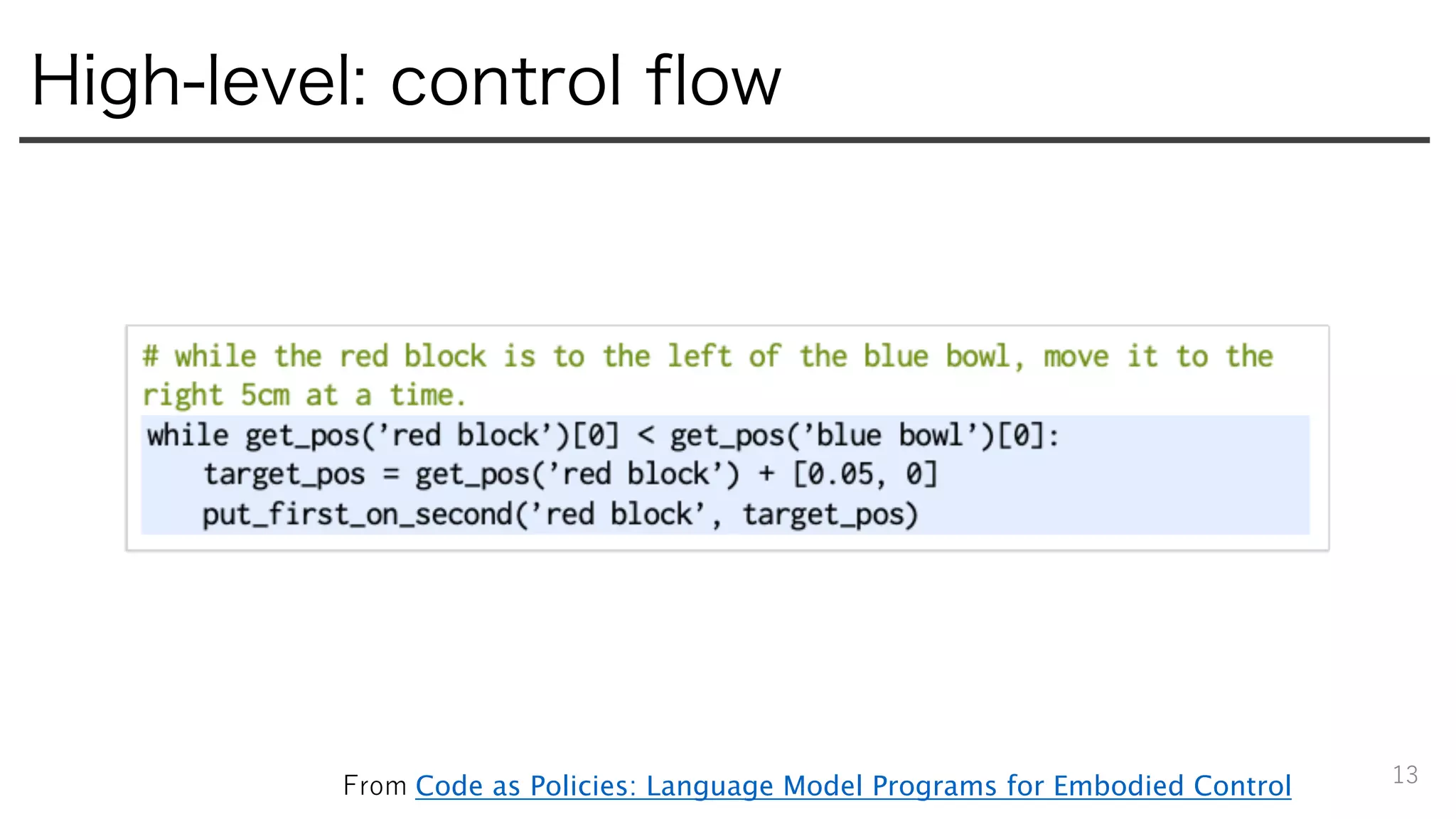
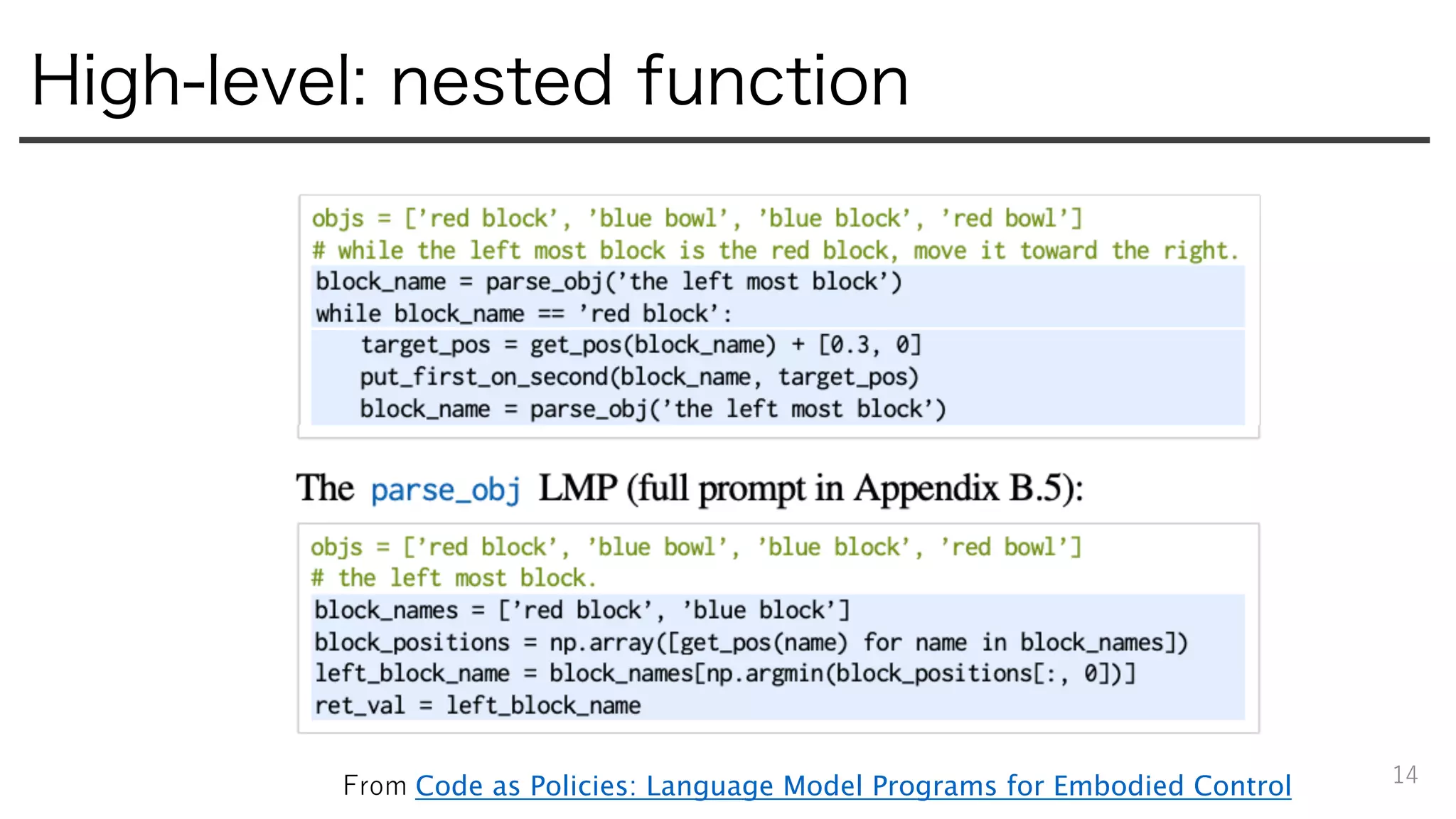
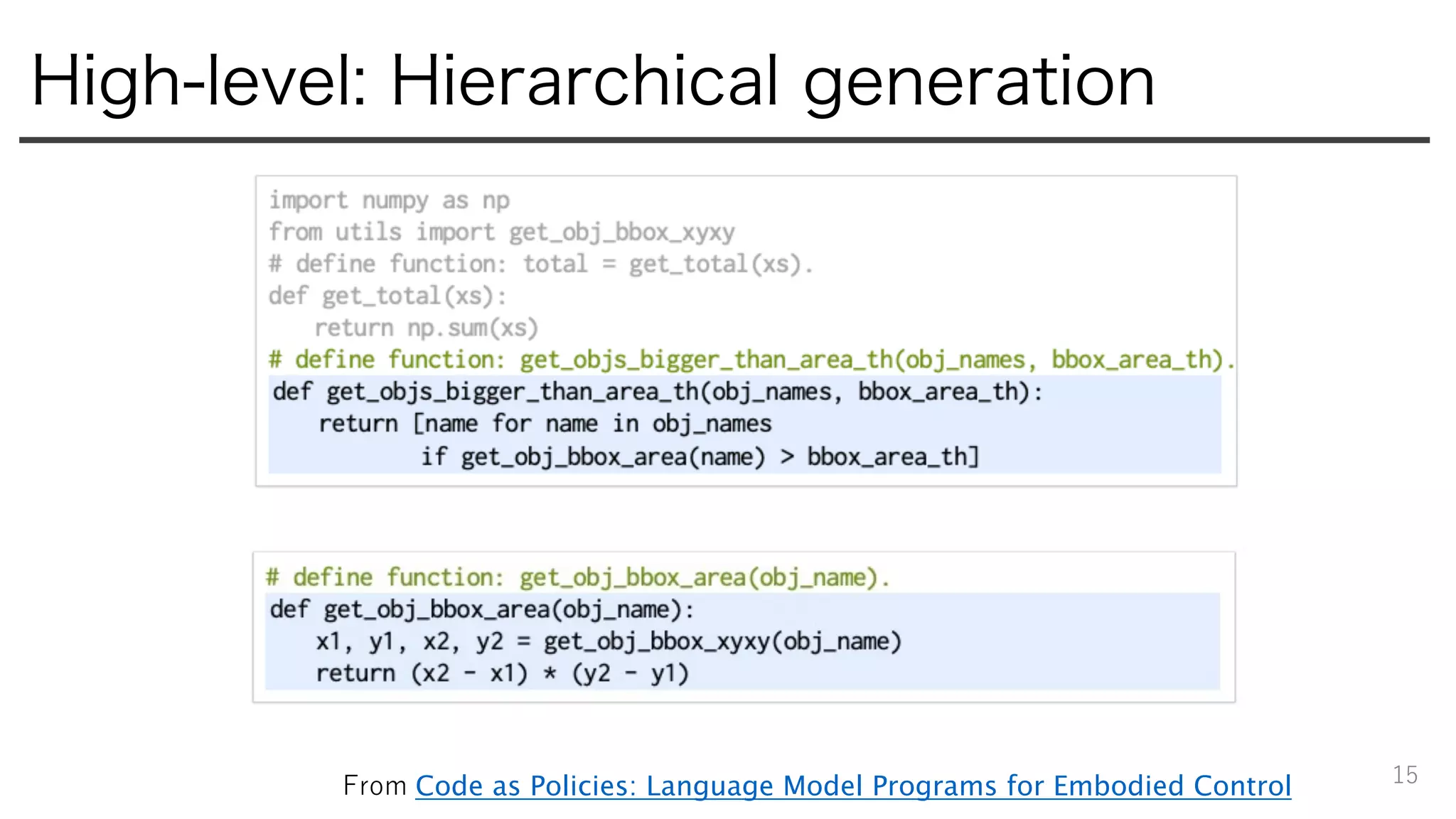
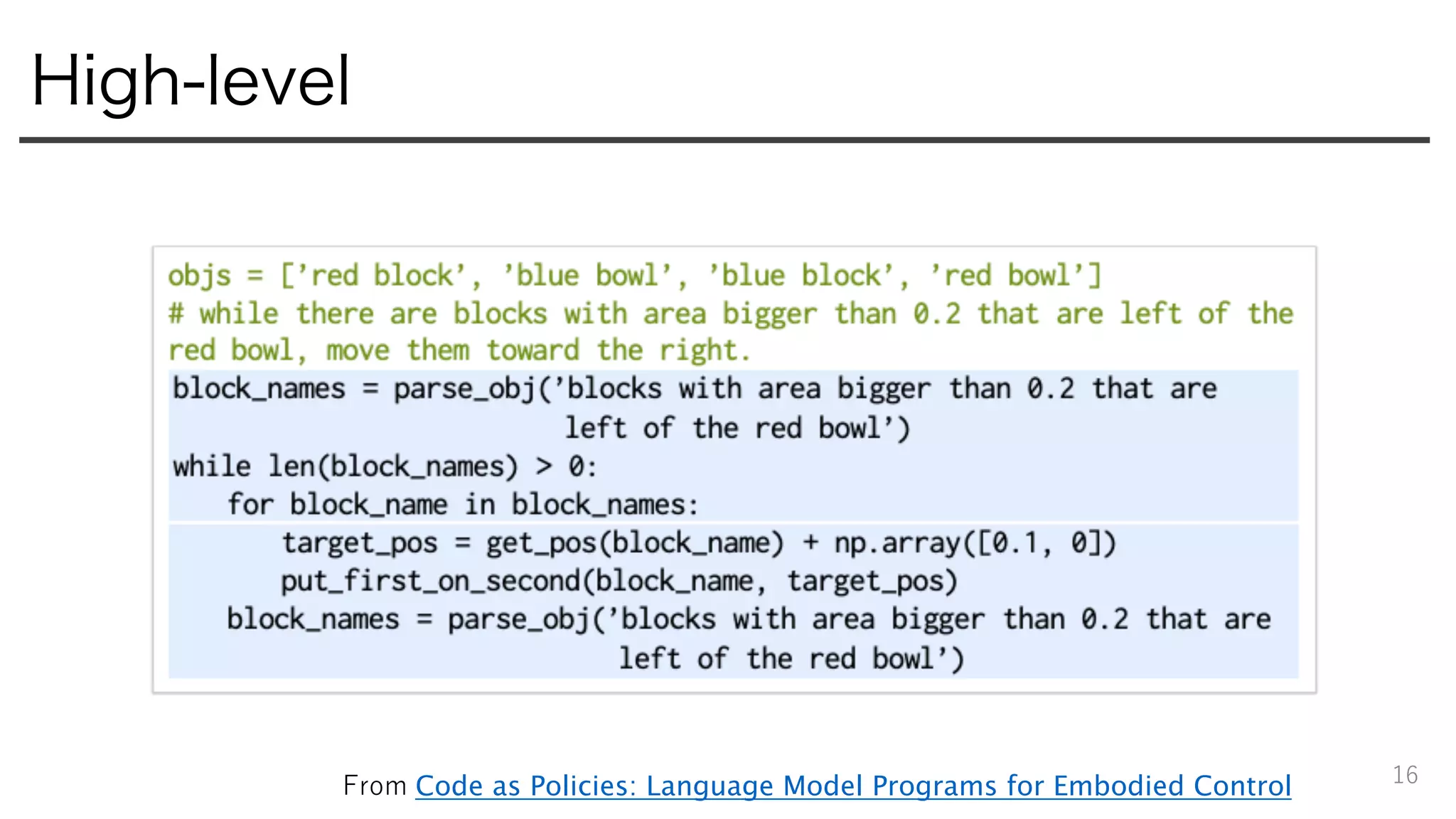
• Example Language Model Programs(High-level)
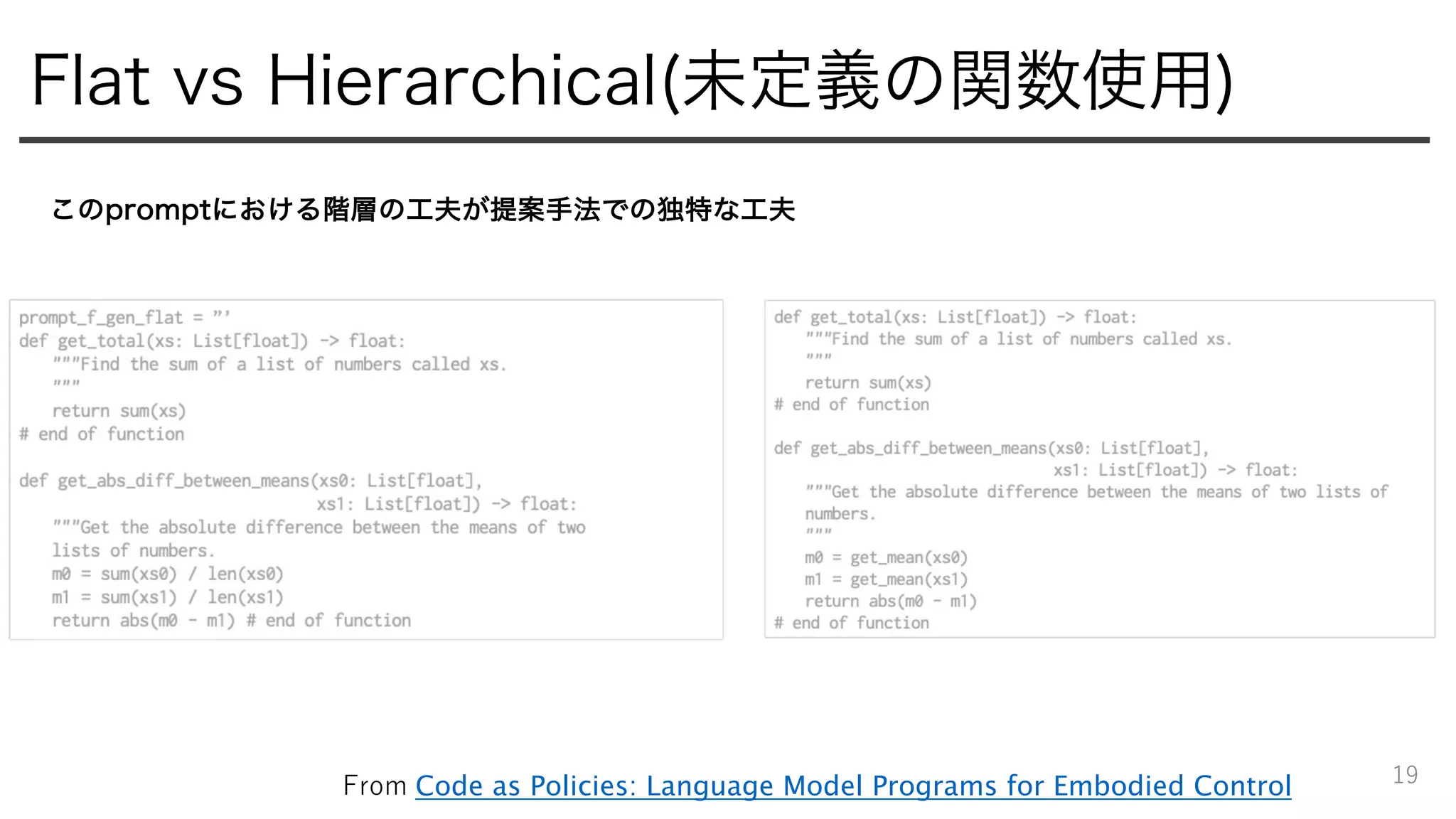
- while loop, nested function, hierarchically generation
9
10.
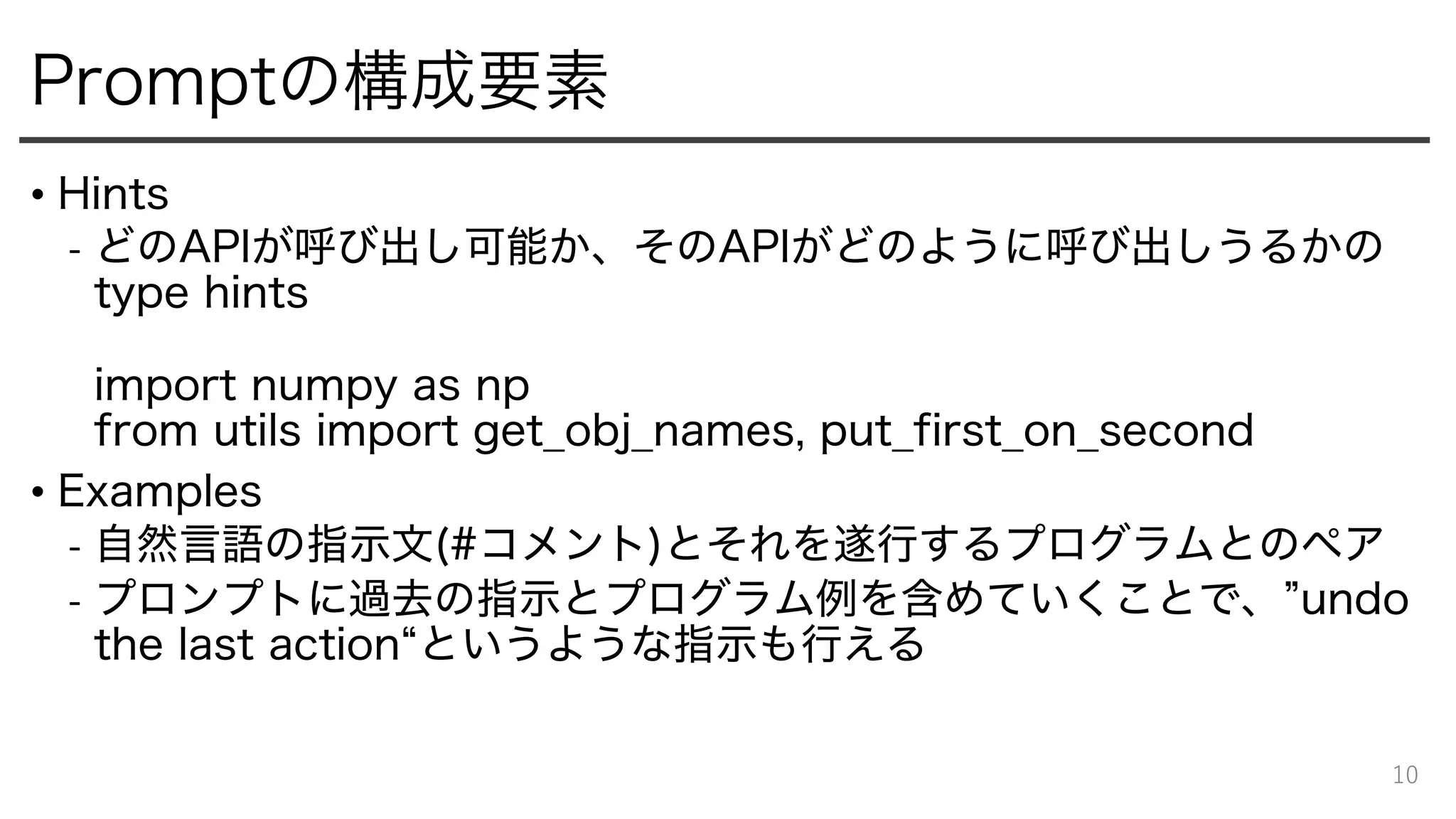
Promptの構成要素
• Hints
- どのAPIが呼び出し可能か、そのAPIがどのように呼び出しうるかの
typehints
import numpy as np
from utils import get̲obj̲names, put̲first̲on̲second
• Examples
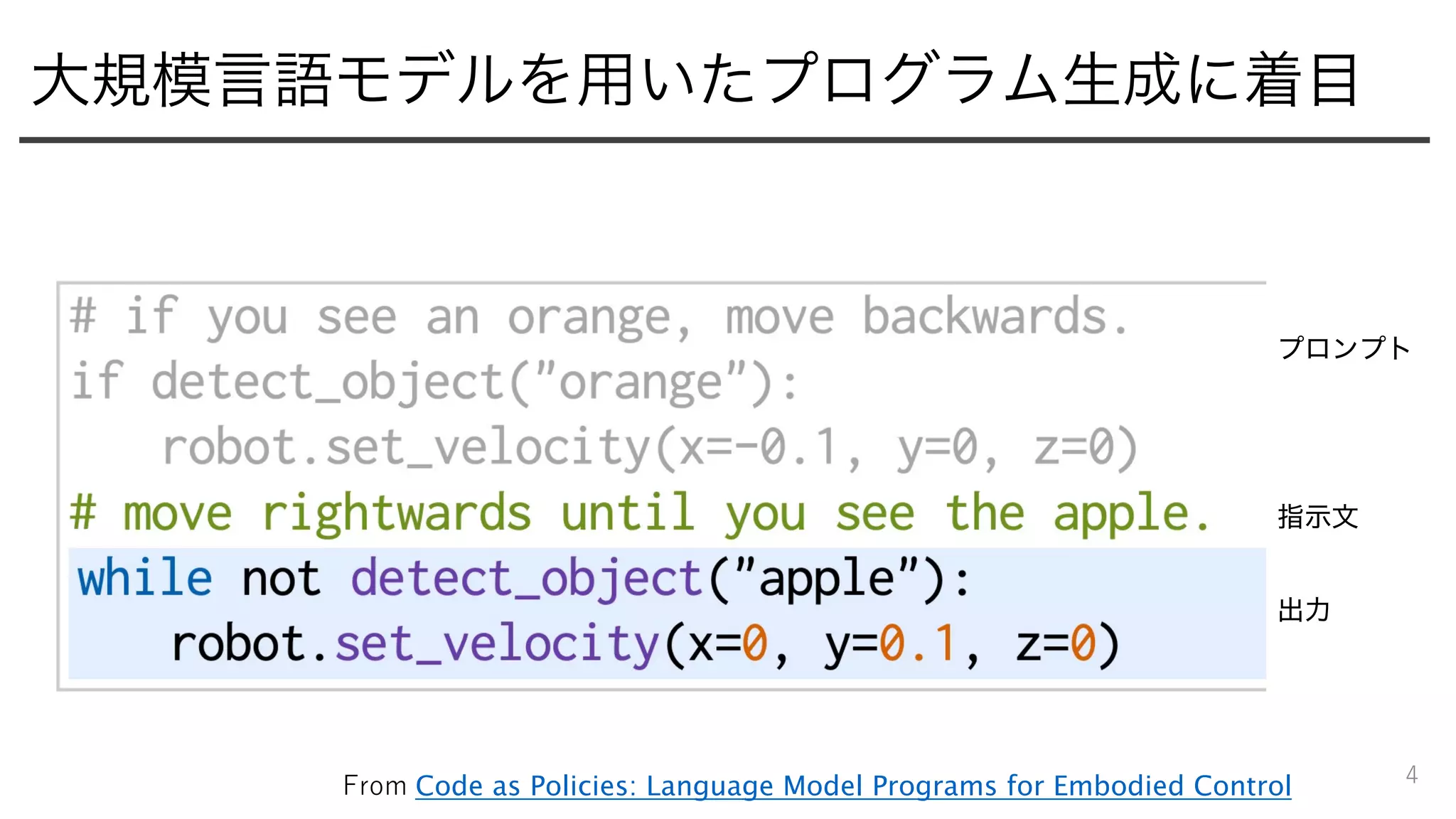
- 自然言語の指示文(#コメント)とそれを遂行するプログラムとのペア
- プロンプトに過去の指示とプログラム例を含めていくことで、”undo
the last action“というような指示も行える
10
Mobile Manipulatorへの適用
23
# takethe coca cola can from the cart and put it in the middle of the fruits on the table.
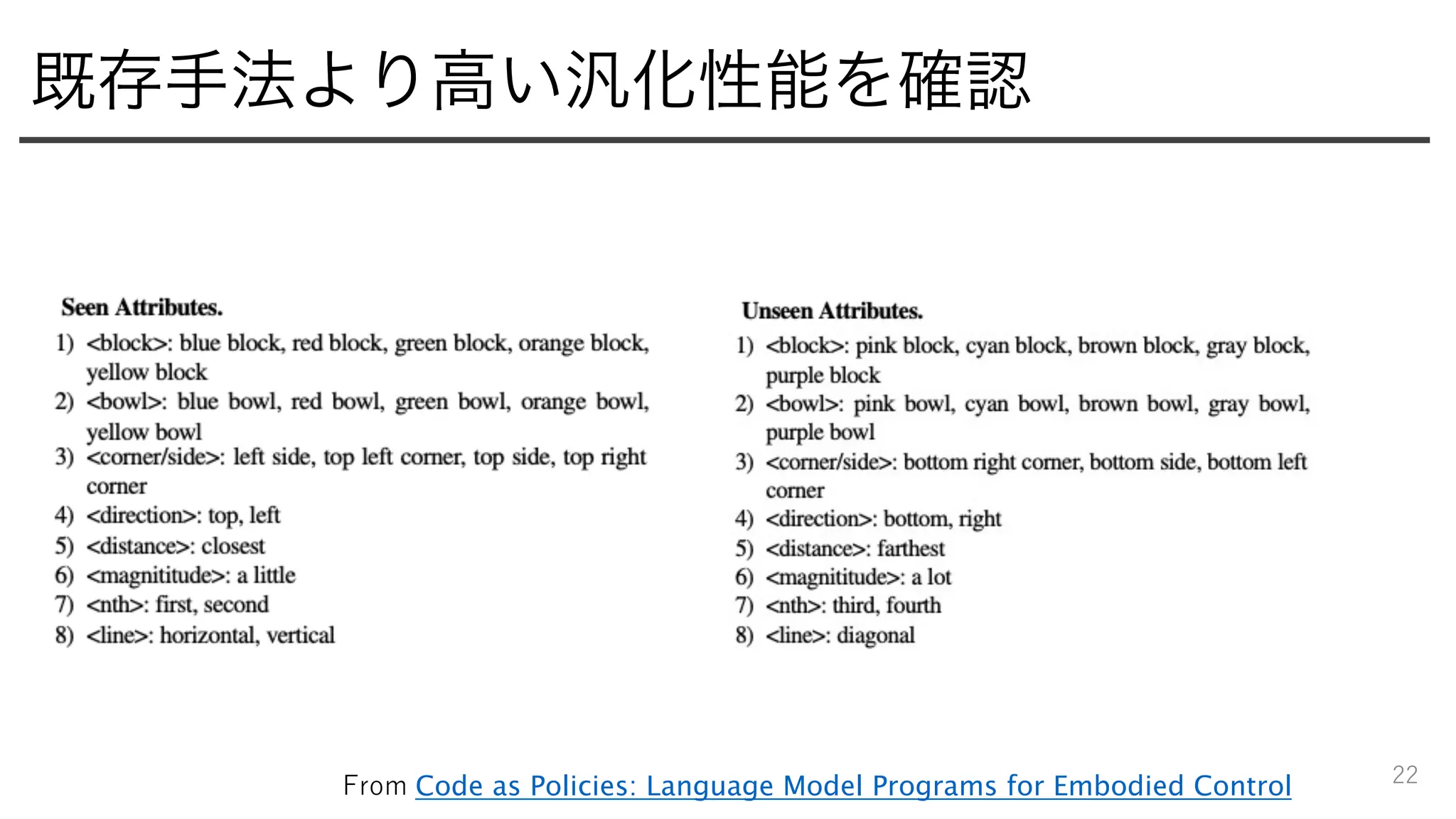
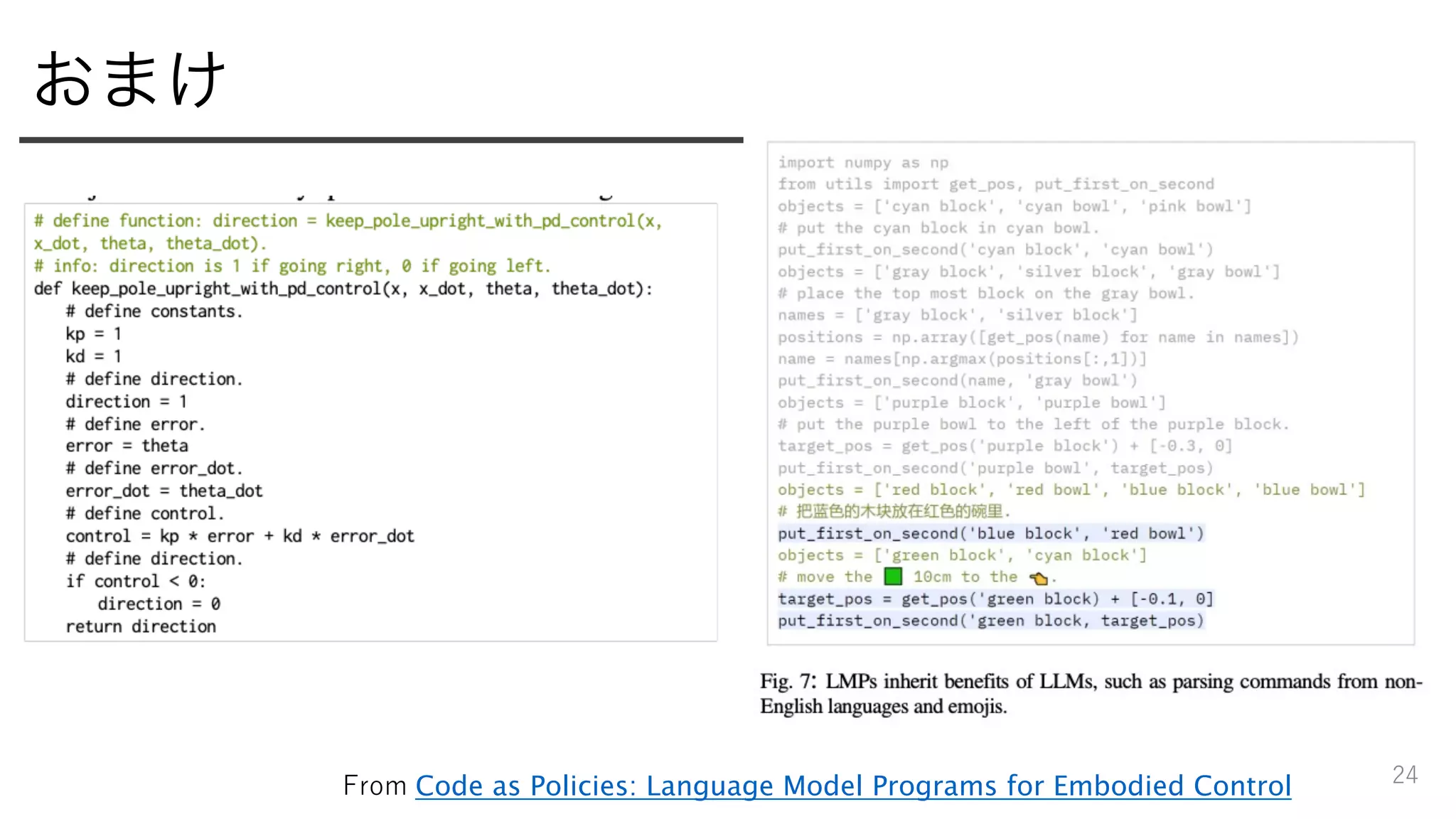
From Code as Policies: Language Model Programs for Embodied Control
![DEEP LEARNING JP
[DL Papers]
Code as Policies: Language Model Programs
for Embodied Control
Keno Harada, M2, the University of Tokyo
http://deeplearning.jp/](https://image.slidesharecdn.com/codeaspolicy20221111-221111052351-e3c852c3/75/DL-Code-as-Policies-Language-Model-Programs-for-Embodied-Control-1-2048.jpg)




![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]GQNと関連研究,世界モデルとの関係について](https://cdn.slidesharecdn.com/ss_thumbnails/20180817-180827085537-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Control as Inferenceと発展](https://cdn.slidesharecdn.com/ss_thumbnails/20191004-191204055019-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets](https://cdn.slidesharecdn.com/ss_thumbnails/20220325okimura-220405024717-thumbnail.jpg?width=640&height=640&fit=bounds)












![[DL Hacks] code_representation](https://cdn.slidesharecdn.com/ss_thumbnails/dlhackscoderepresentation-190509074441-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]What Matters In On-Policy Reinforcement Learning? A Large-Scale Empiri...](https://cdn.slidesharecdn.com/ss_thumbnails/20200619misono-200630053718-thumbnail.jpg?width=640&height=640&fit=bounds)





















