Downloaded 13 times


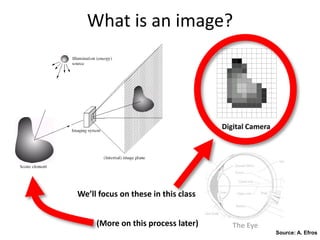
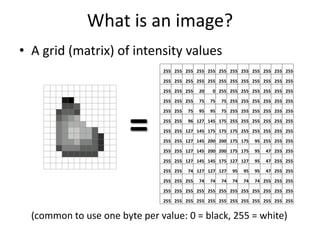
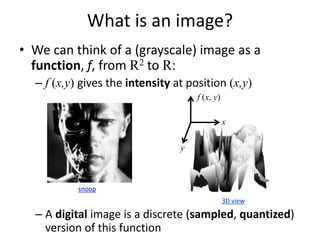
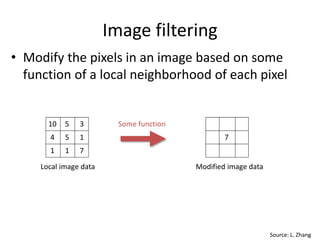
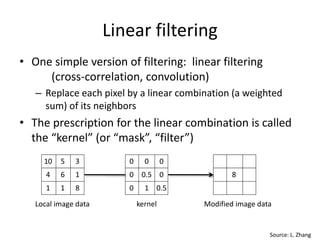
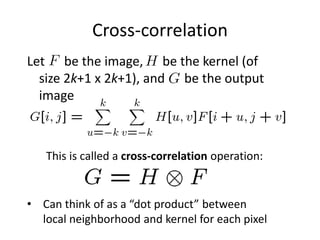
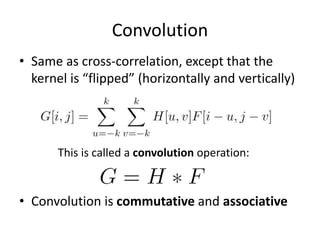
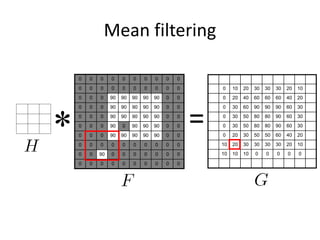
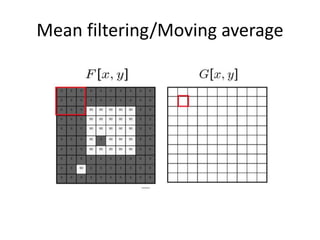
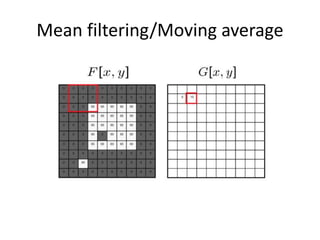
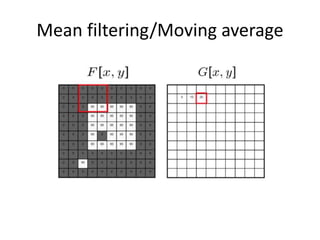
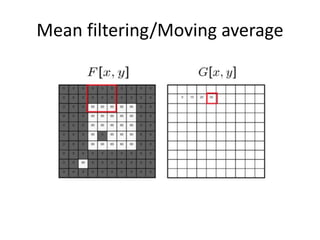
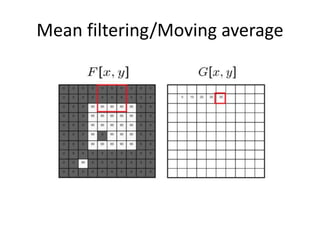
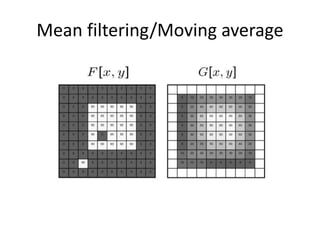
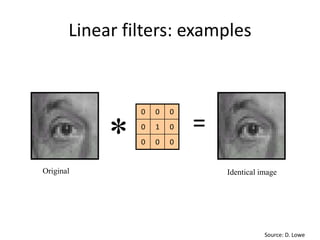
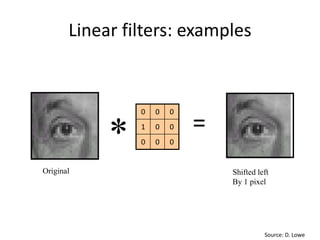
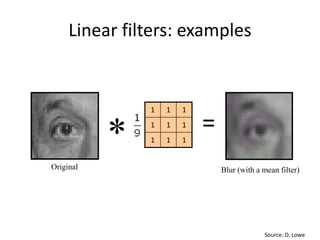
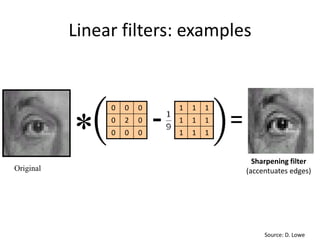
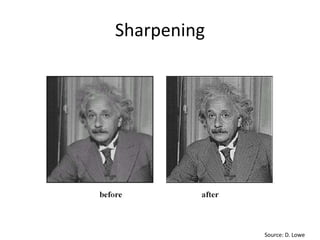
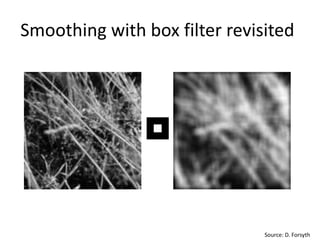
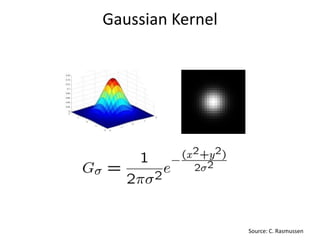
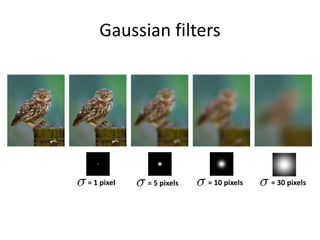
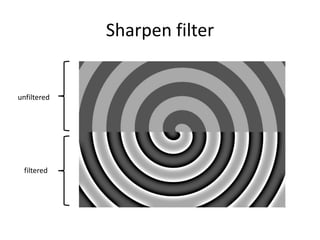
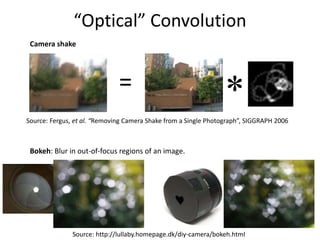
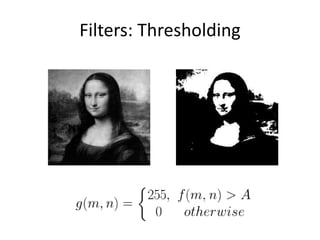

This document provides an overview of image filtering and linear filtering techniques. It begins with definitions of what an image is from a digital perspective - as a grid of intensity values. It then discusses how image transformations like filtering work by applying operators to modify pixel values based on neighboring areas. Specifically, it focuses on linear filtering using convolution or cross-correlation to replace pixel values with a weighted sum of surrounding pixels according to a kernel or filter. Examples of common linear filters are presented like mean, Gaussian, and sharpening filters. It also discusses how filtering can be used for tasks like noise reduction, blurring and sharpening.