Download as PDF, PPTX

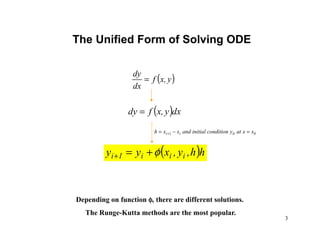
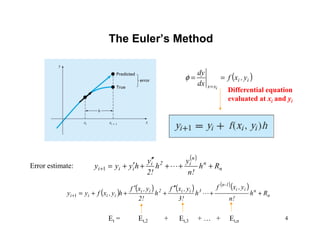
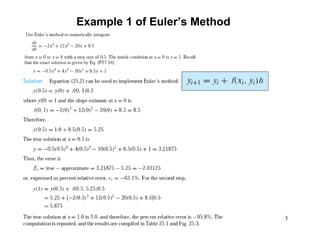
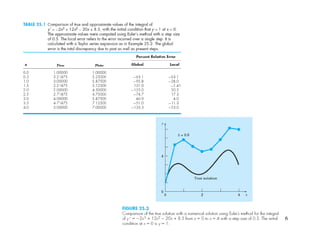
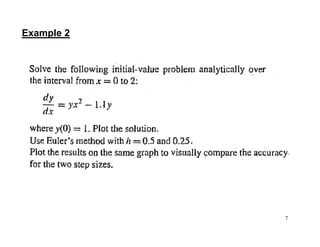
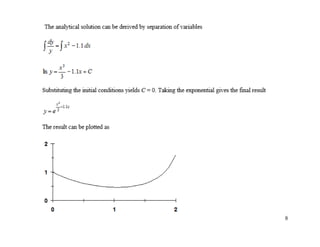
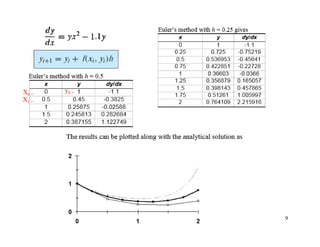

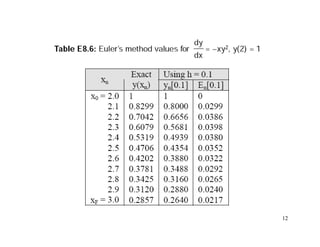
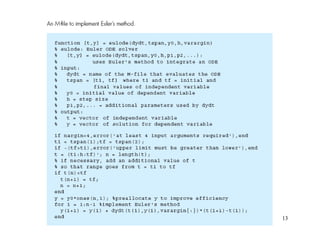
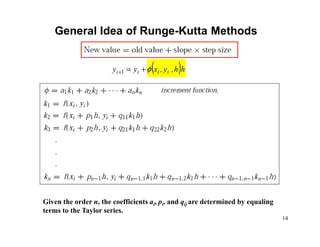
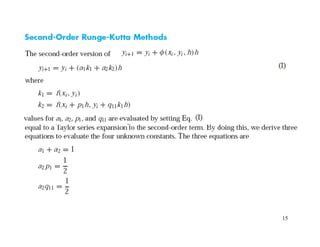
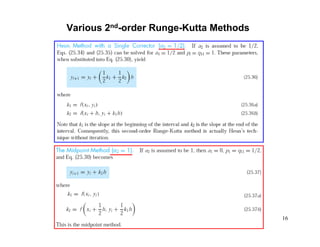


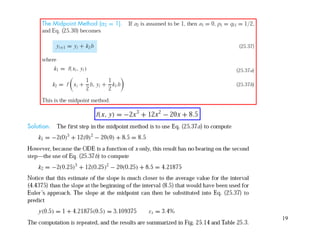


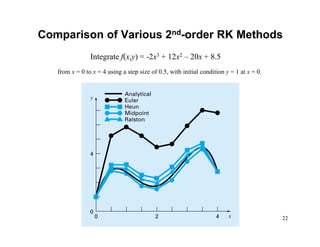

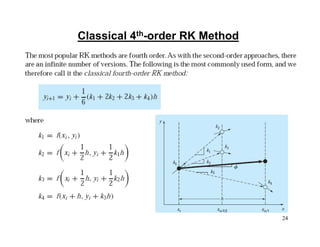
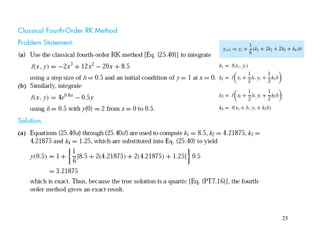
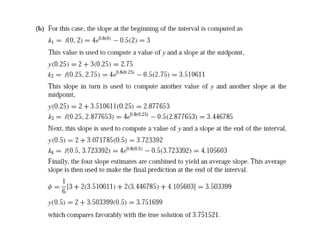
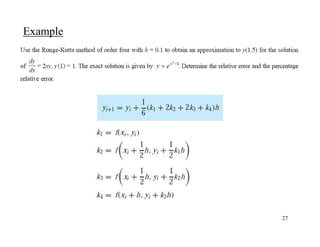

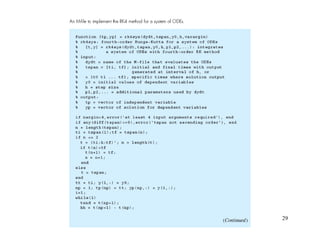
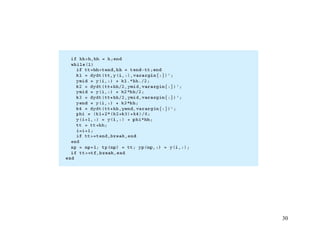

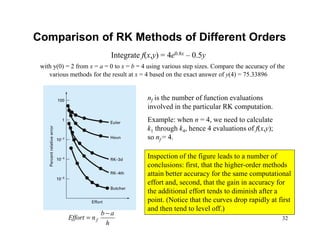
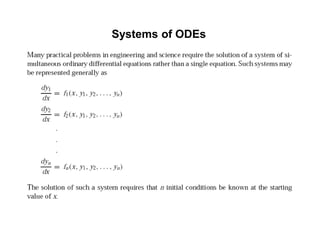
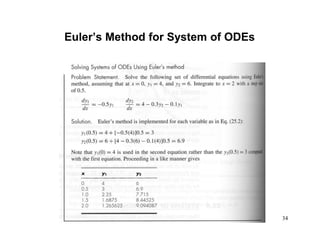
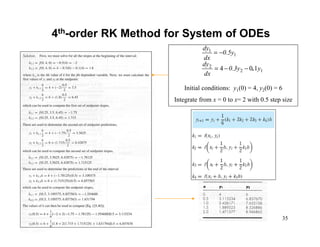
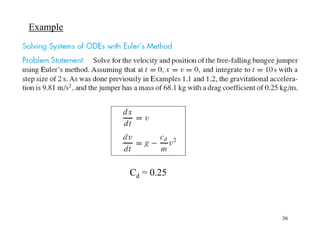

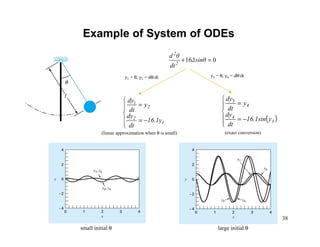


This document discusses numerical methods for solving ordinary differential equations (ODEs), including: 1) Initial-value problems where conditions are specified at a single value of the independent variable, unlike boundary-value problems. 2) Euler's method and higher-order Runge-Kutta methods for approximating solutions to ODEs using finite differences. Examples are provided to illustrate the methods. 3) Extensions of these methods to systems of ODEs, along with examples of applying the methods to coupled differential equations.