Downloaded 32 times
![General 3D Rotations Step 2. Establish [ T R ] x x axis (a,b,c) (0,b,c) Projected Point Rotated Point x y z](https://image.slidesharecdn.com/09transformation3d-110413084254-phpapp02/85/09transformation3d-13-320.jpg)
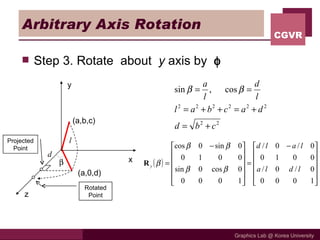
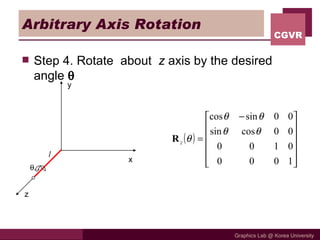
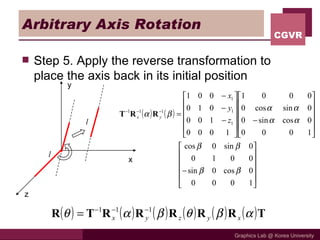
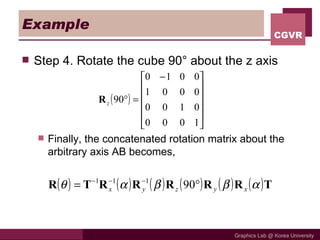
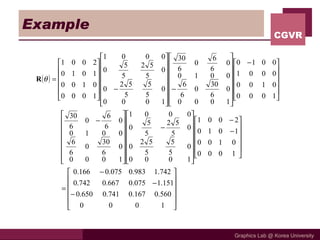
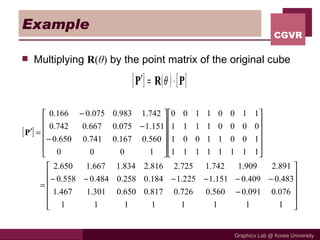
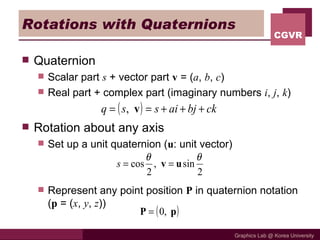
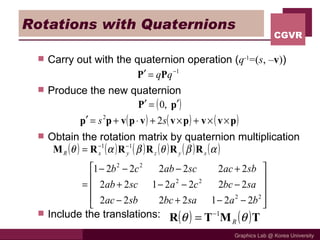
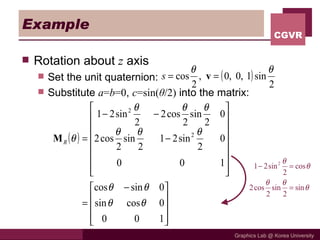
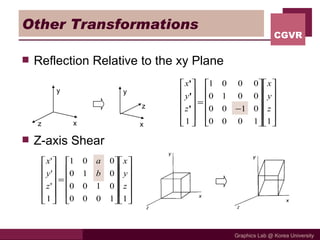
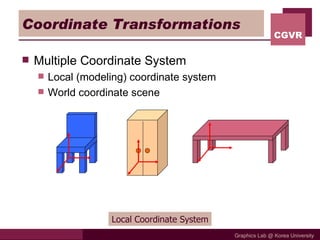
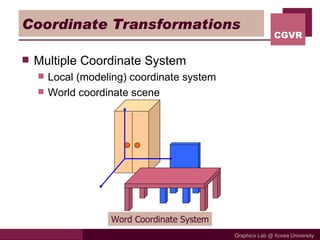
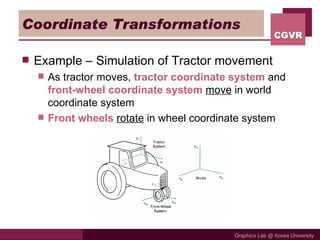
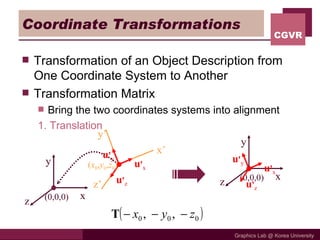
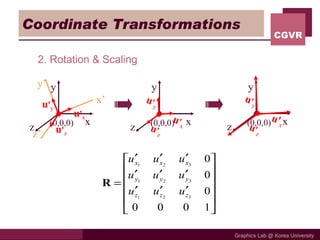

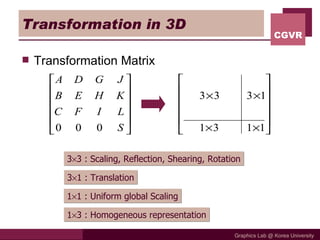
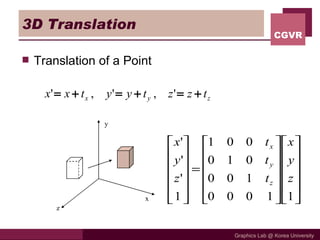
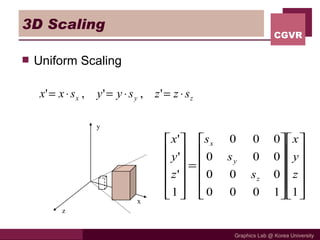
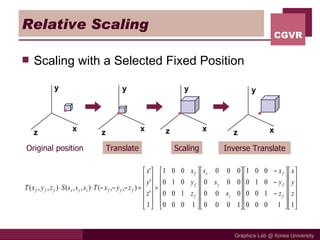
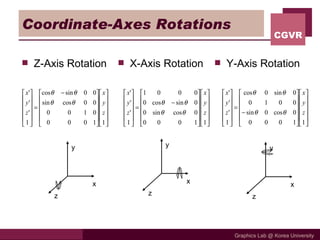
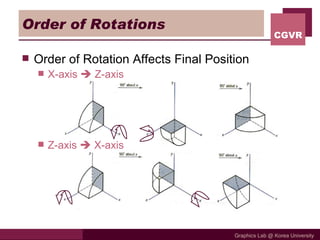
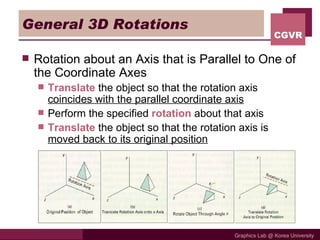
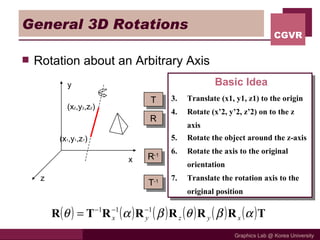
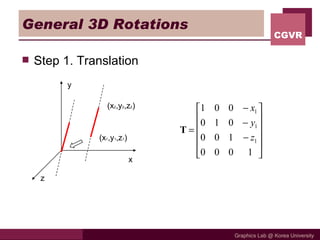
This document discusses various 3D geometric transformations including translation, scaling, rotation, and coordinate transformations. It provides details on: 1) How translation, uniform scaling, and relative scaling transformations work in 3D space. 2) How rotations around the x, y, z axes as well as arbitrary axes are performed using transformation matrices. 3) How rotations can also be represented using quaternion algebra and how this relates to transformation matrices. 4) How objects can be transformed between different coordinate systems through sequences of translation, rotation, and scaling transformations.