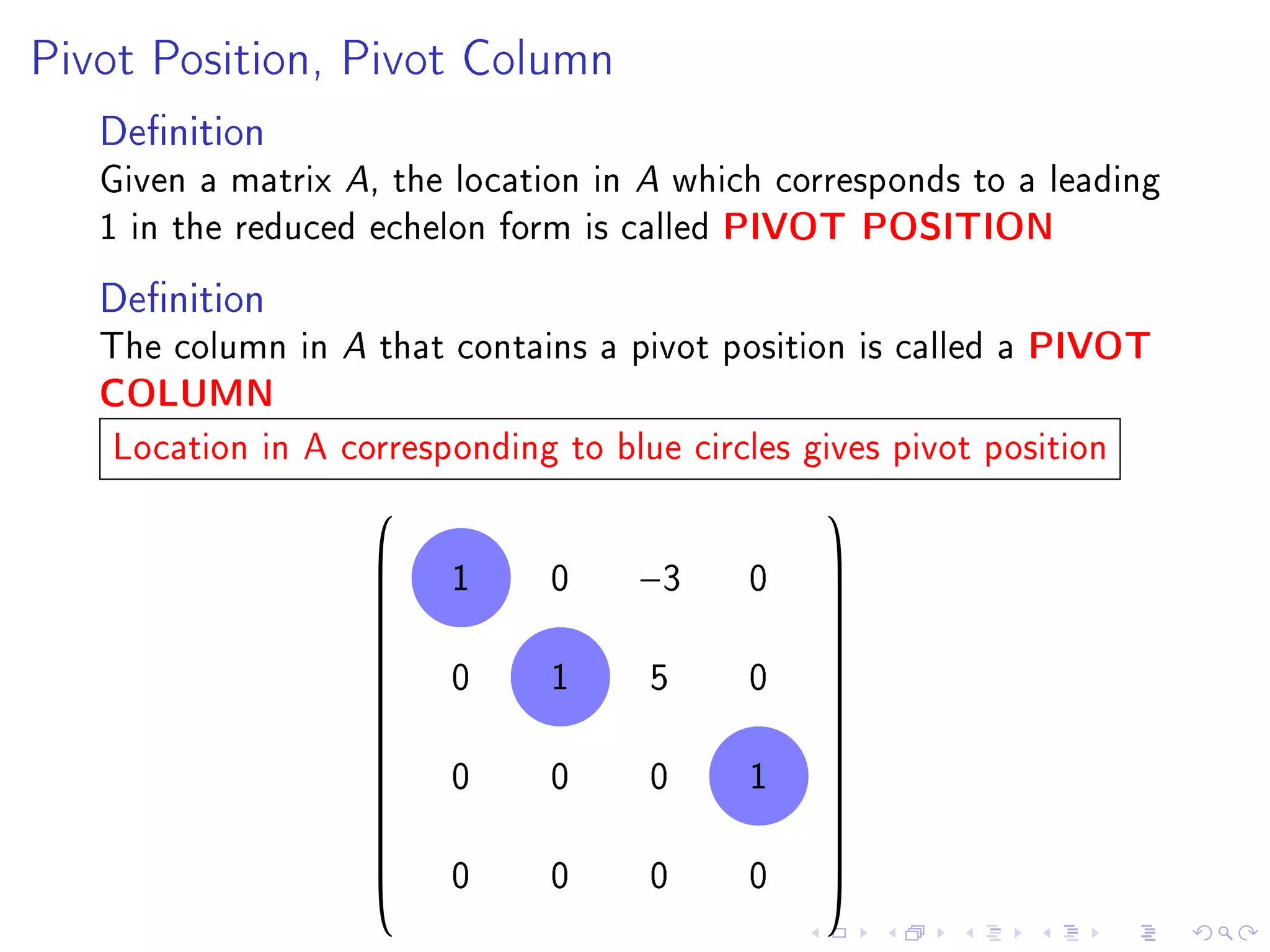
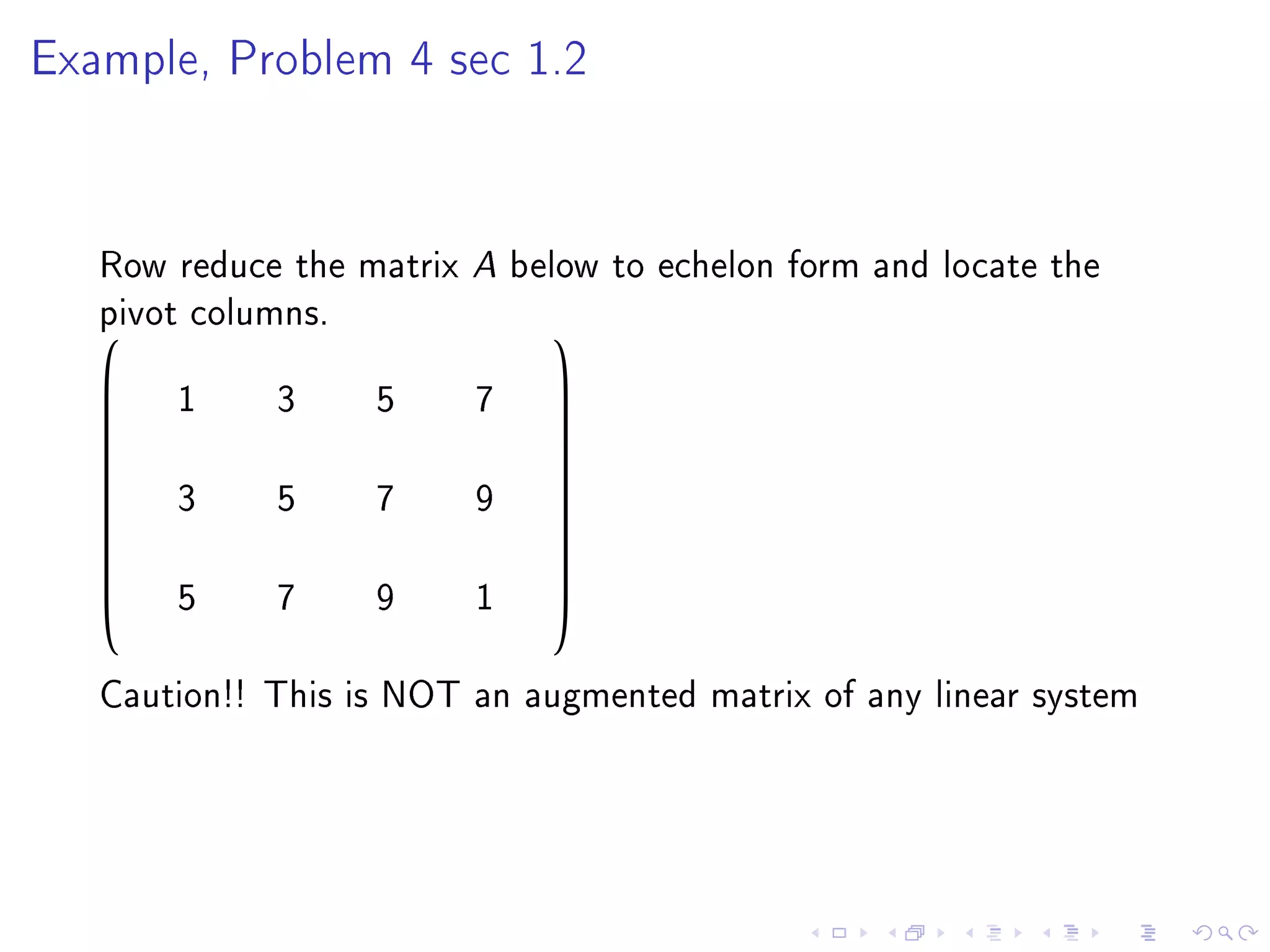
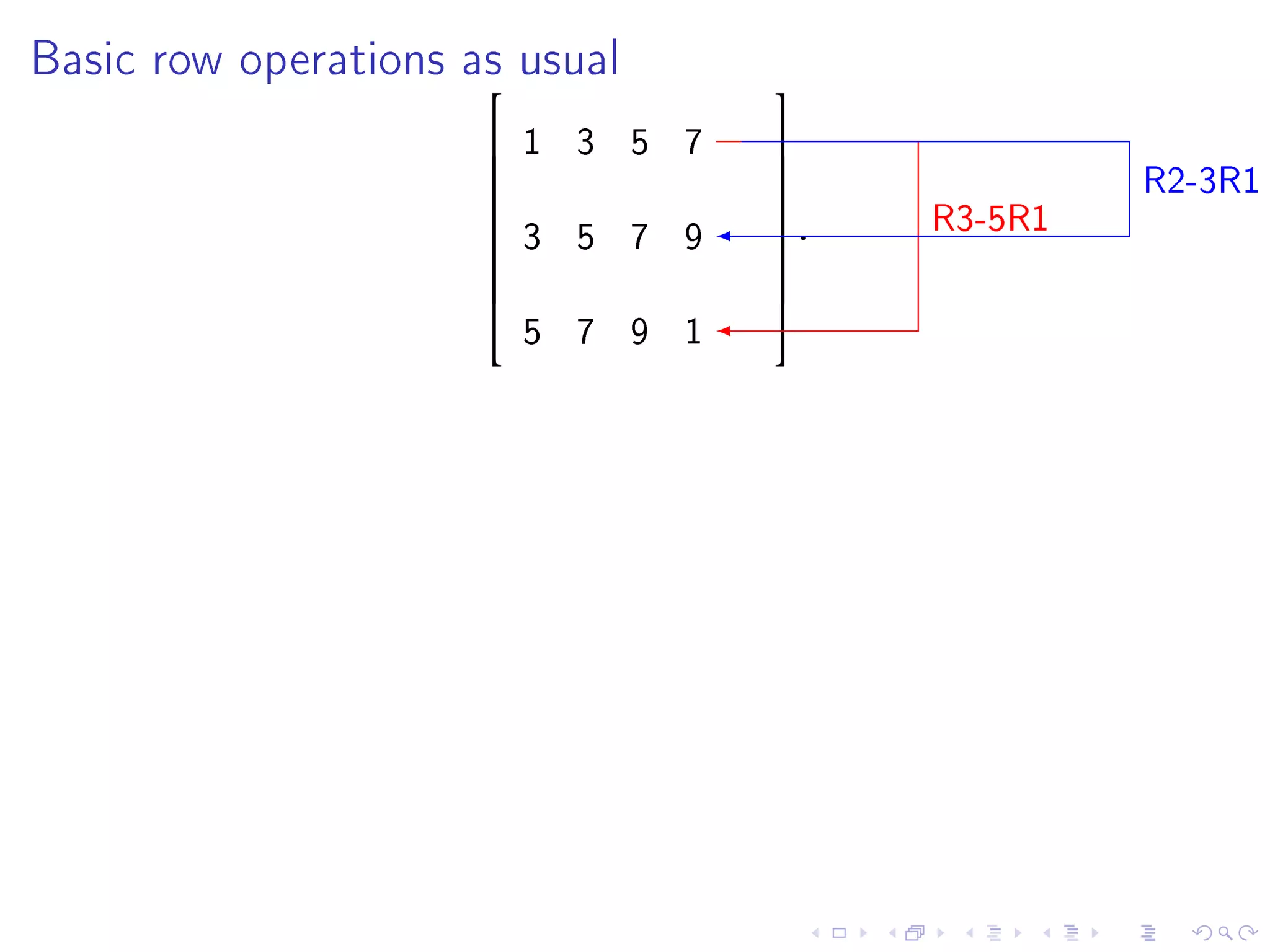
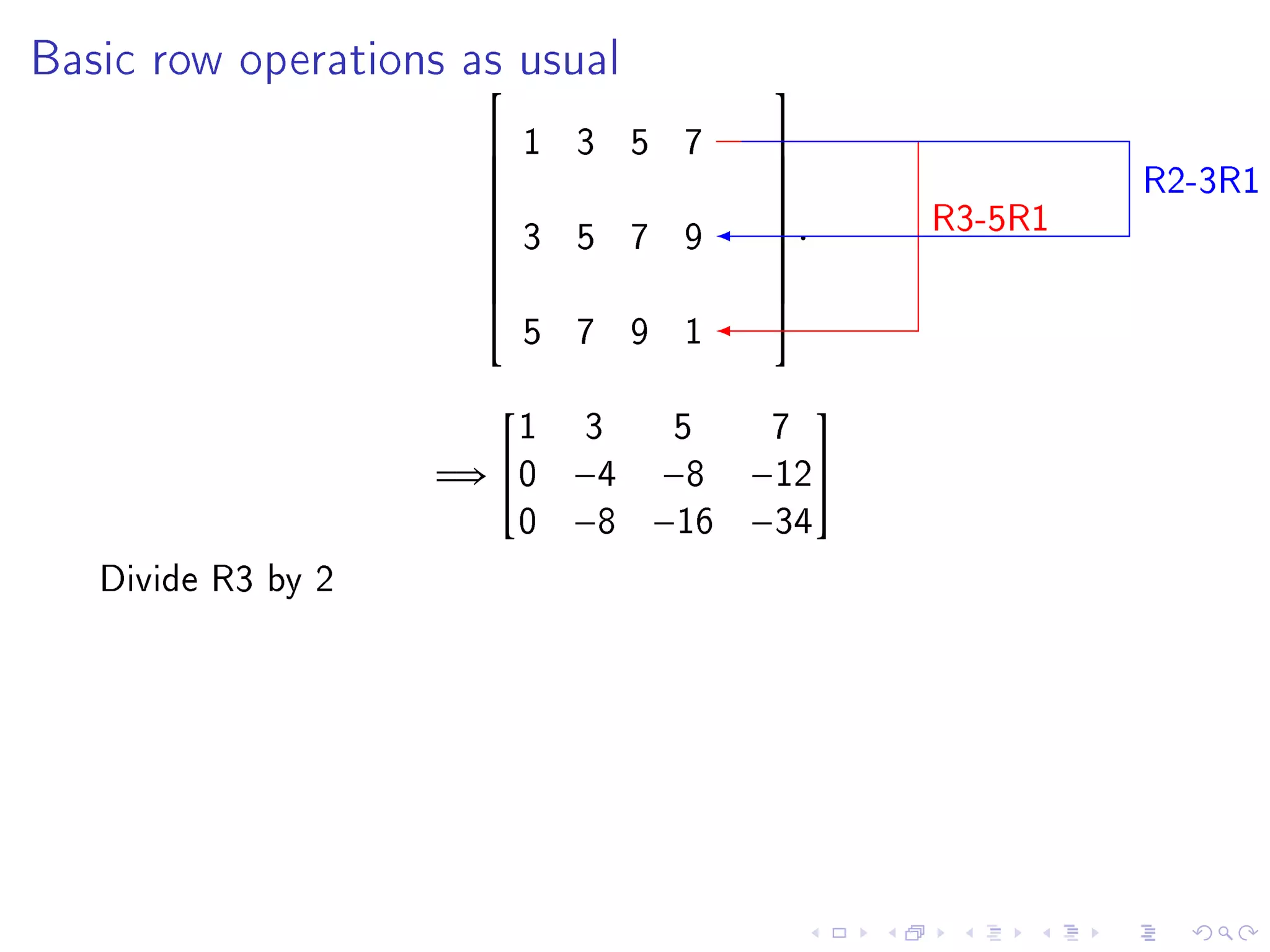
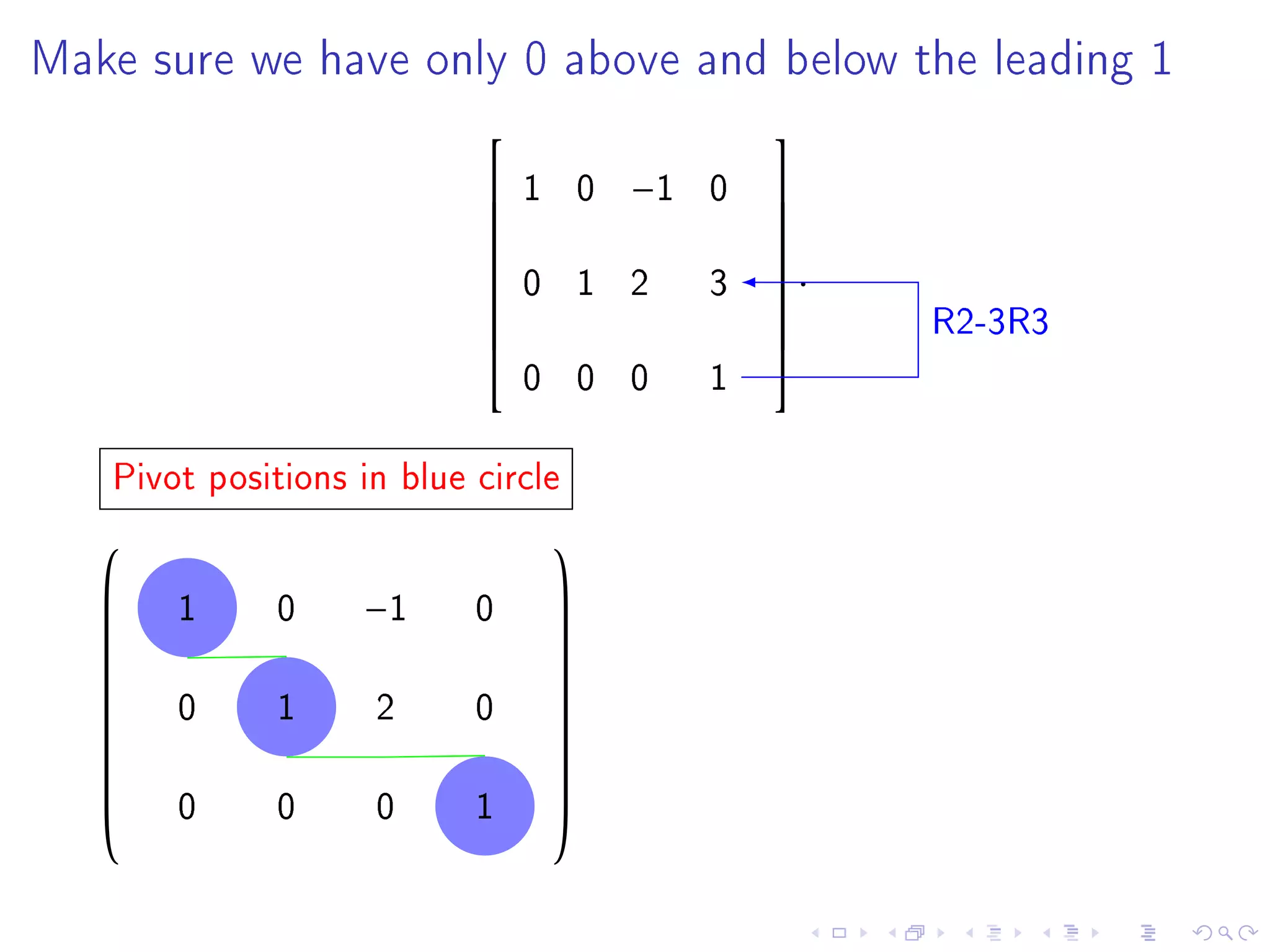
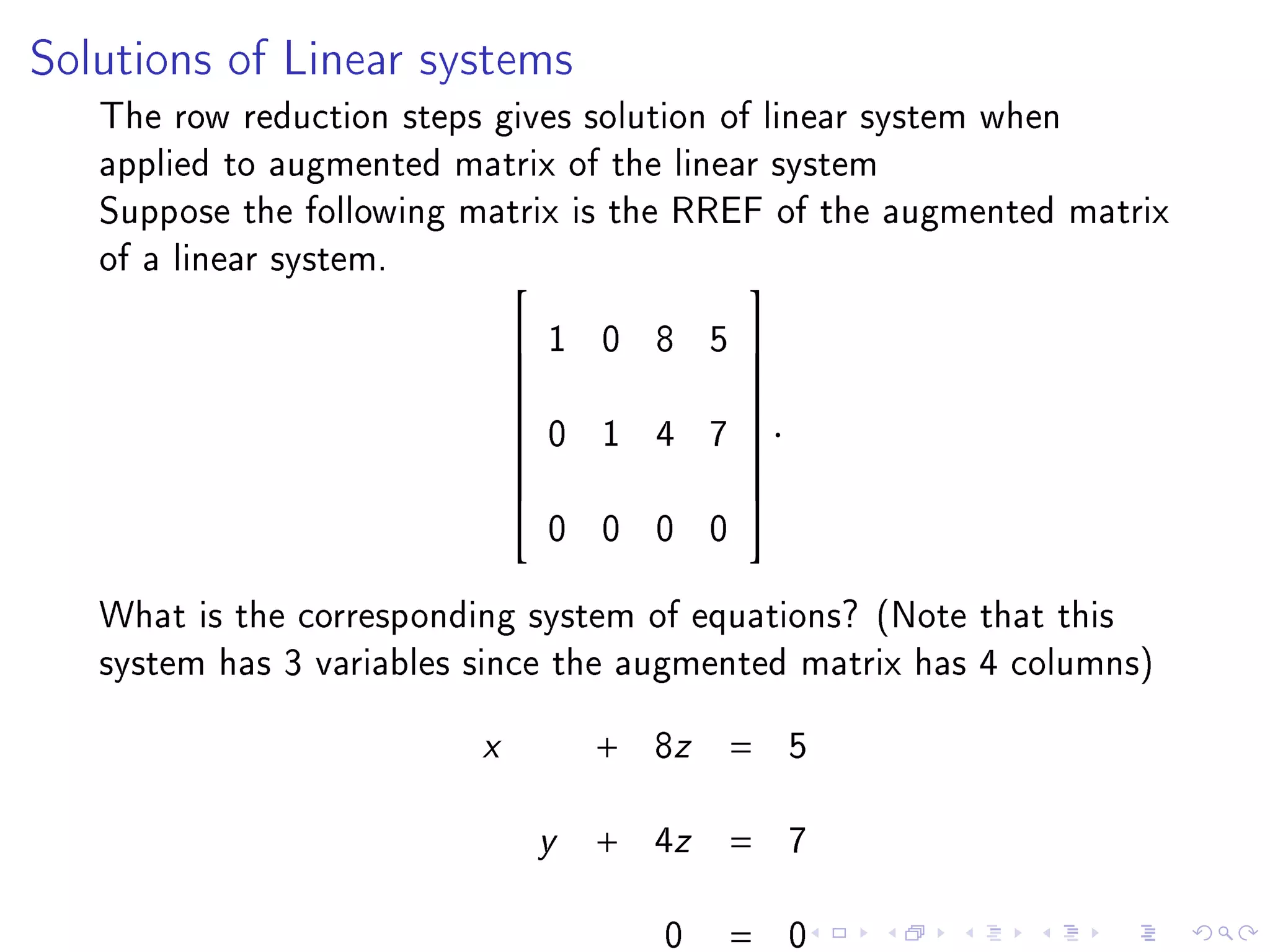
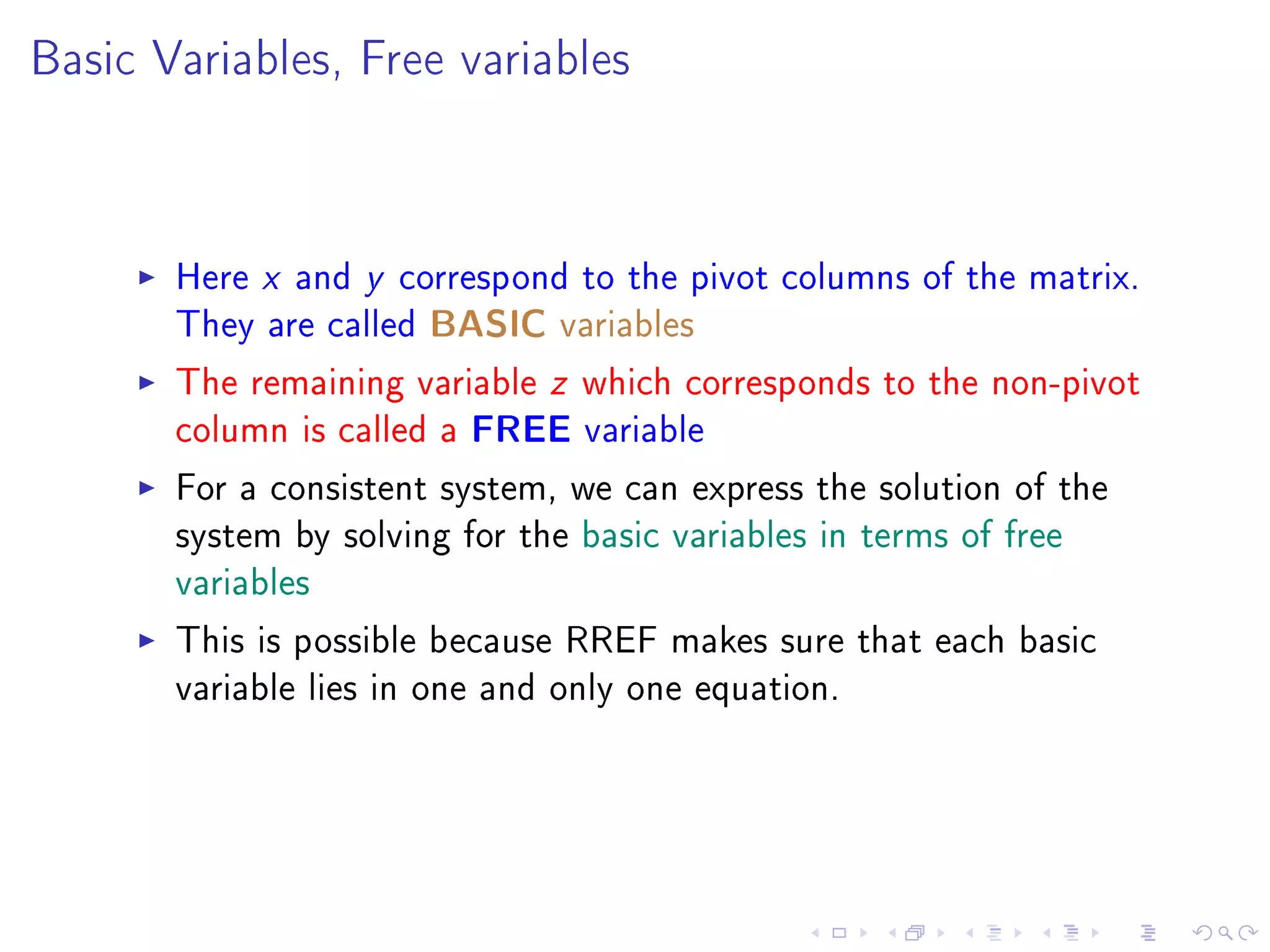
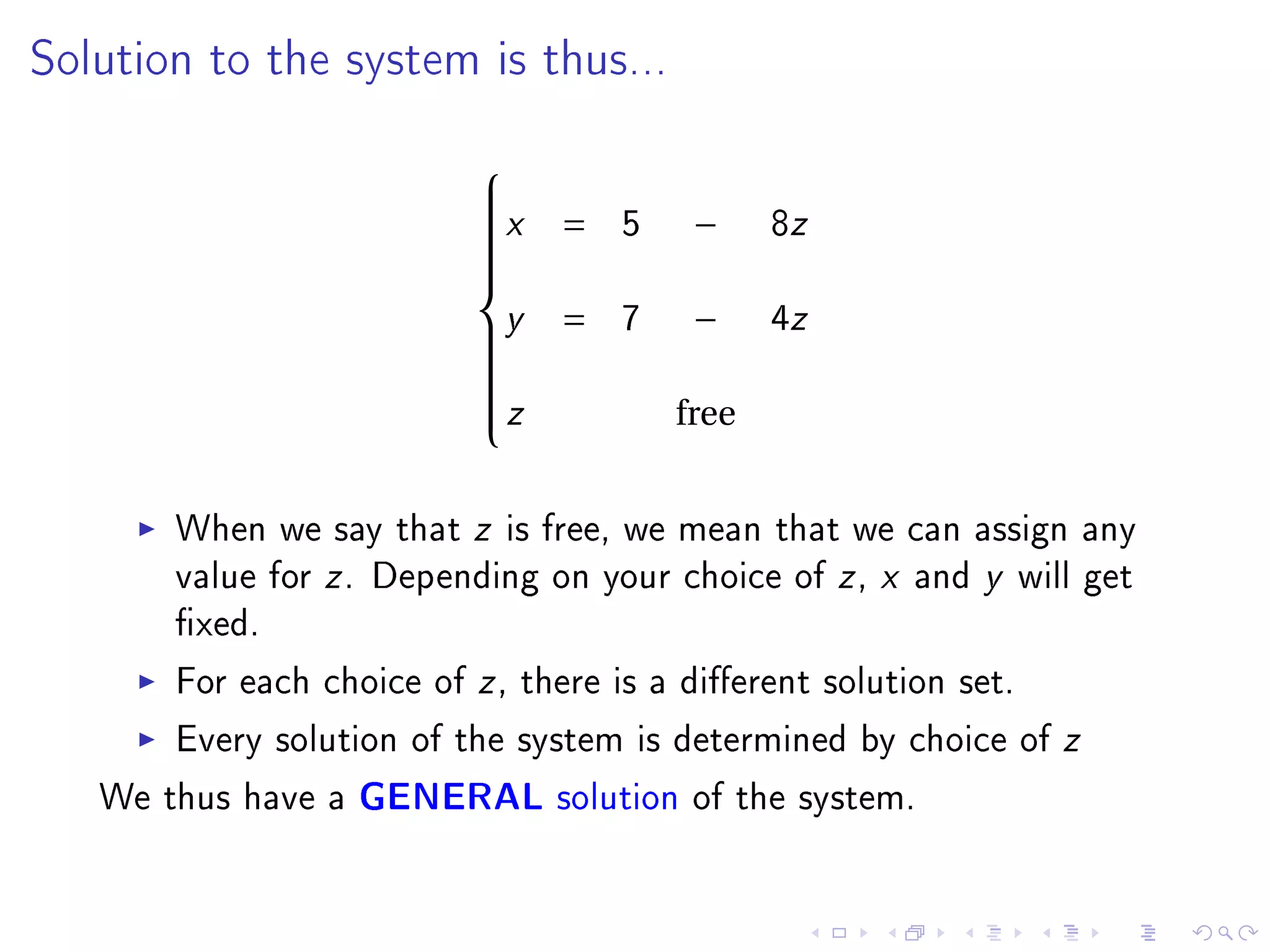
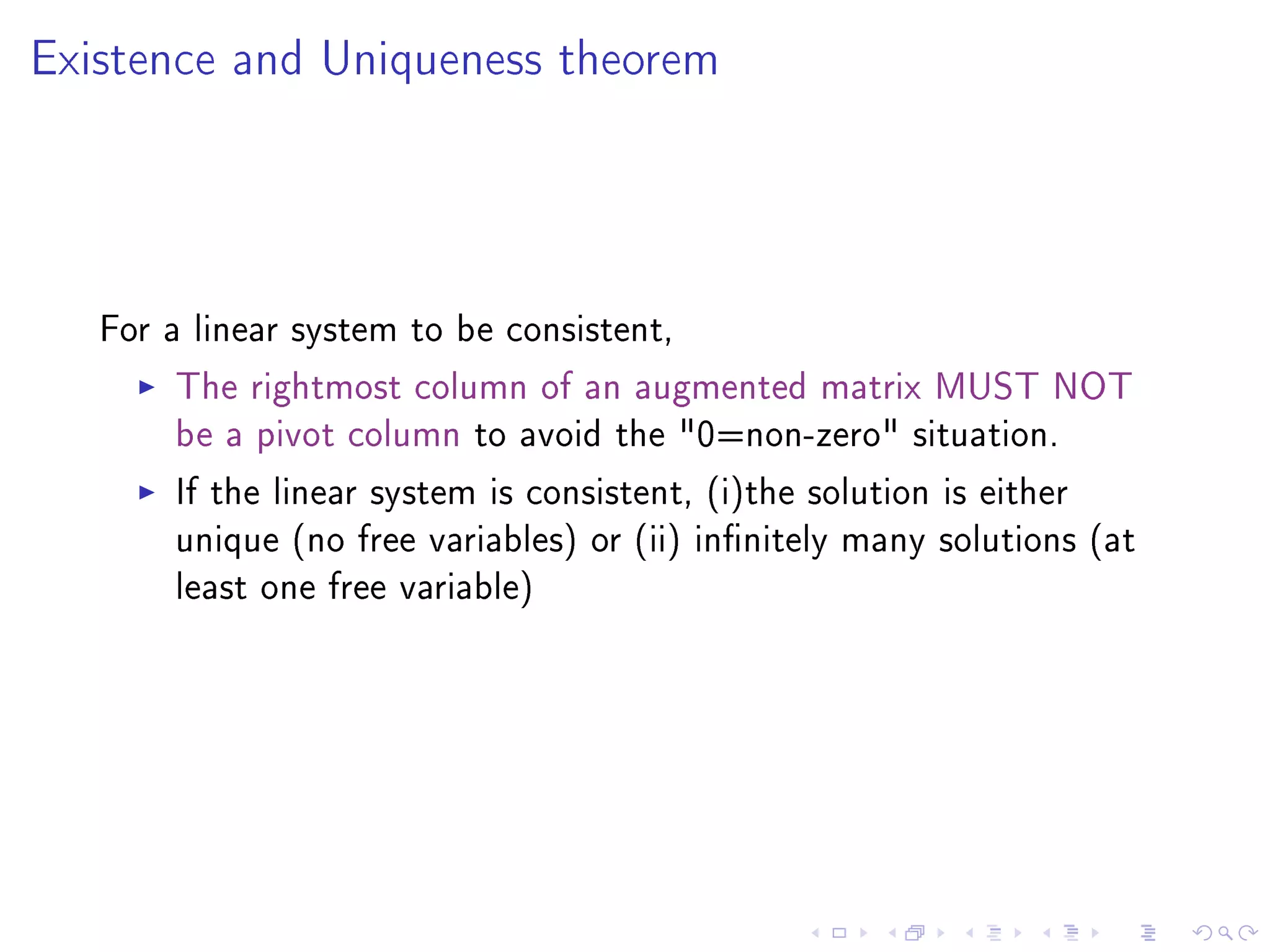
The document contains announcements and information about a class. It announces corrections to lecture slides, the last day to drop the class with a refund, and provides definitions and examples related to echelon form, reduced row echelon form, pivot positions, and solving systems of linear equations.