Downloaded 400 times










![15
2
3
2
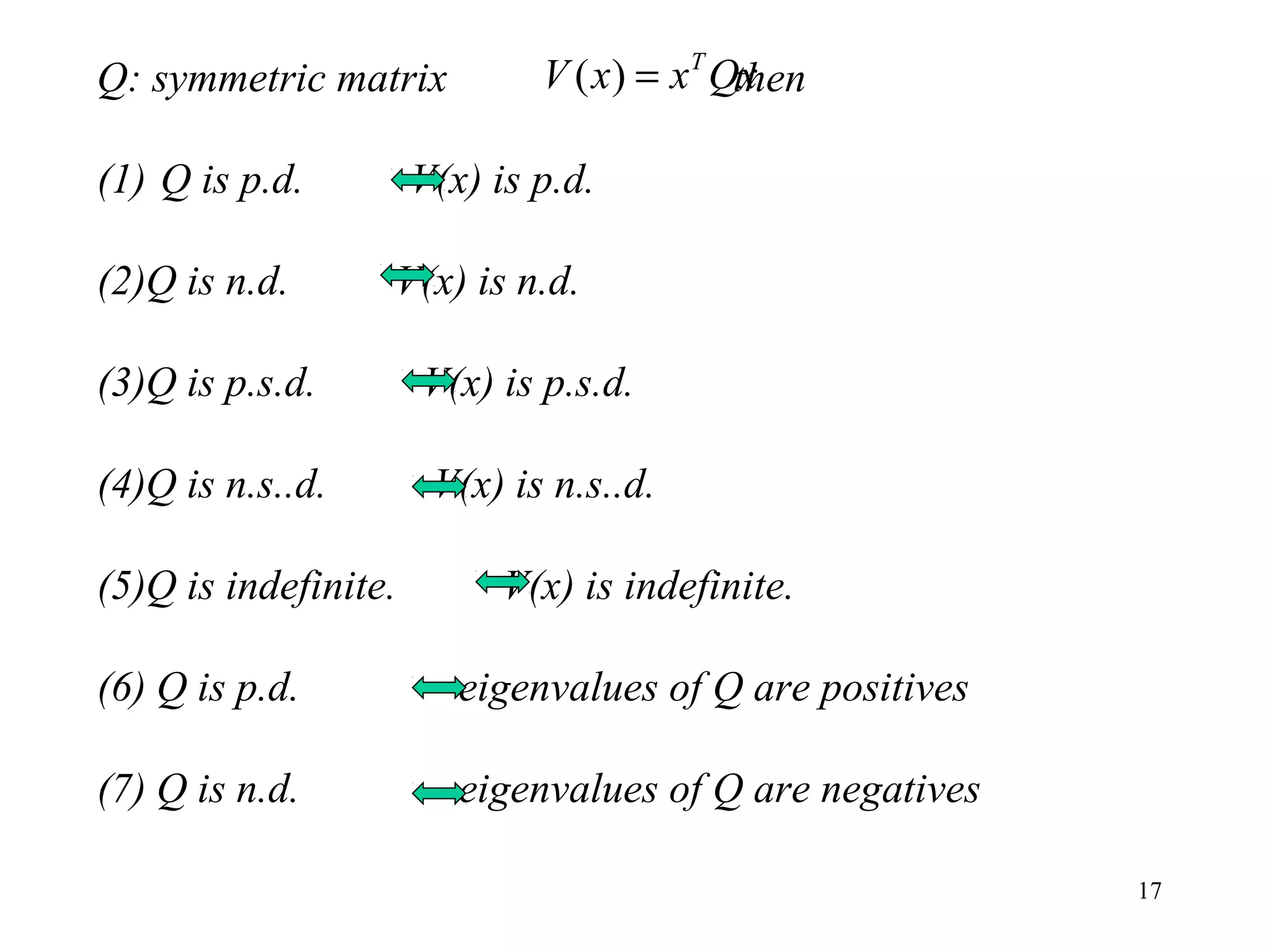
213214 )(),,( xxxxxxV ++= p.s.d.
2
3213215 ),,( xxxxxxV ++= indefinite
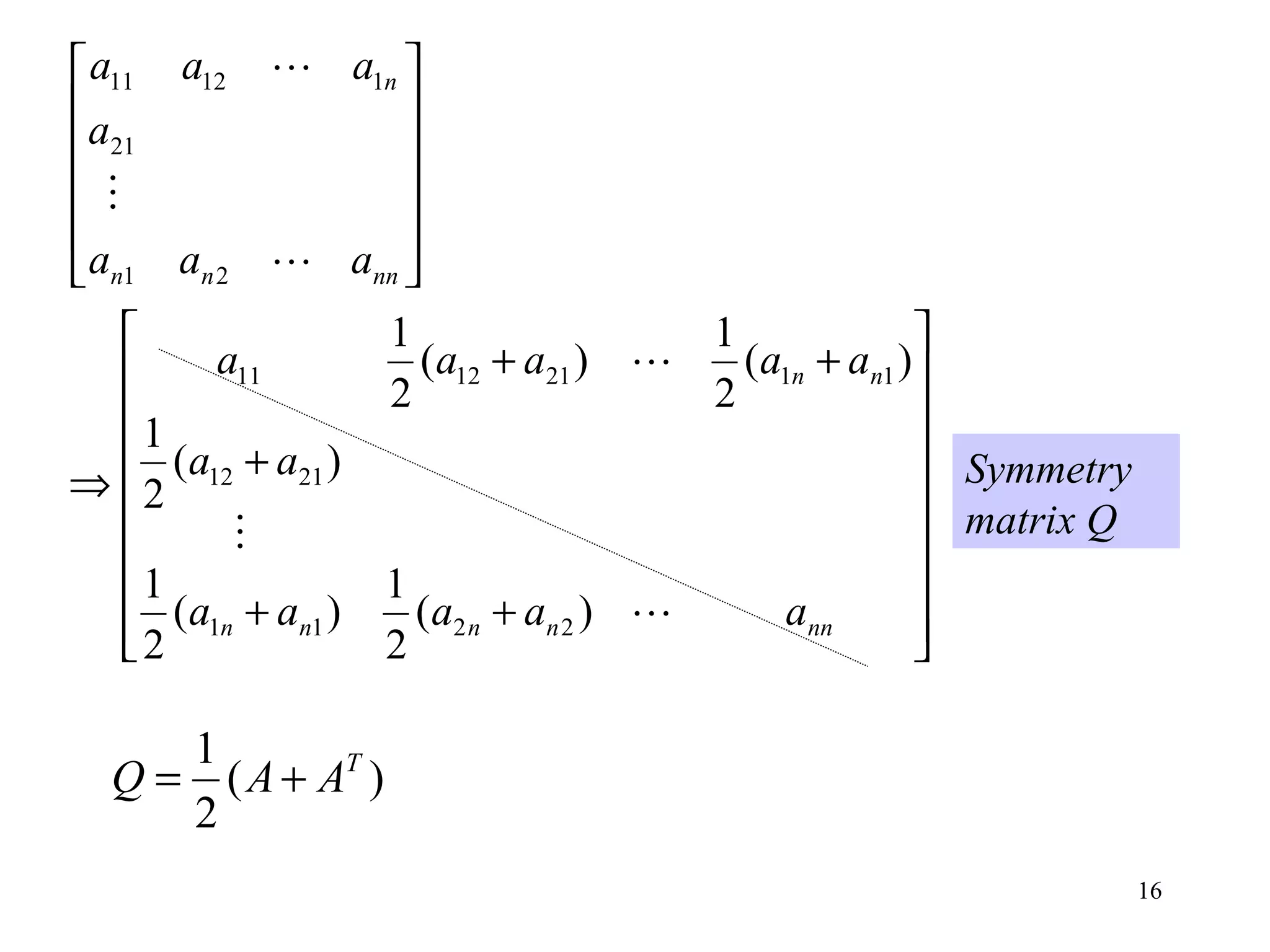
Quadratic form
[ ]
AXX
x
x
x
aaa
a
aaa
xxx
xxaxV
T
nnnnn
n
n
ji
n
i
n
j
ij
∆
= =
=
=
= ∑∑
2
1
21
21
11211
21
1 1
)(](https://image.slidesharecdn.com/lyapunovstability-150425122630-conversion-gate02/75/Lyapunov-stability-14-2048.jpg)
![19
Remark
(1) are all negative Q is n.d.
(2) All leading principle minors of –Q are positive Q is n.d.
nQQQ ,, 21
example
[ ]
[ ]
=
=
++++=
3
2
1
321
3
2
1
321
2
332
2
131
2
1
132
330
202
100
630
402
6342)(
x
x
x
xxx
x
x
x
xxx
xxxxxxxxV
024
06
02
3
2
1
−=
=
=
Q
Q
Q
Q is not p.d.](https://image.slidesharecdn.com/lyapunovstability-150425122630-conversion-gate02/75/Lyapunov-stability-18-2048.jpg)
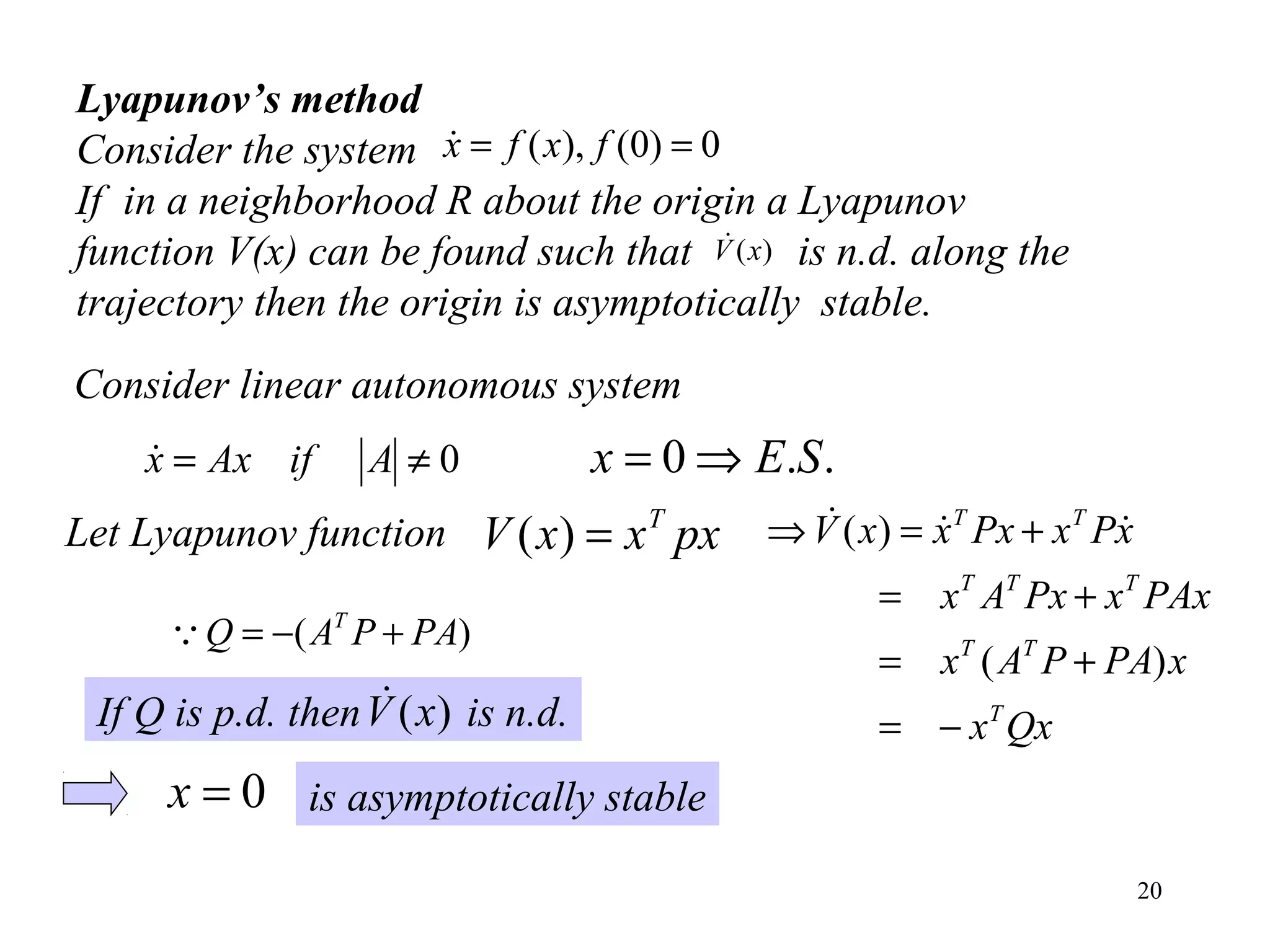


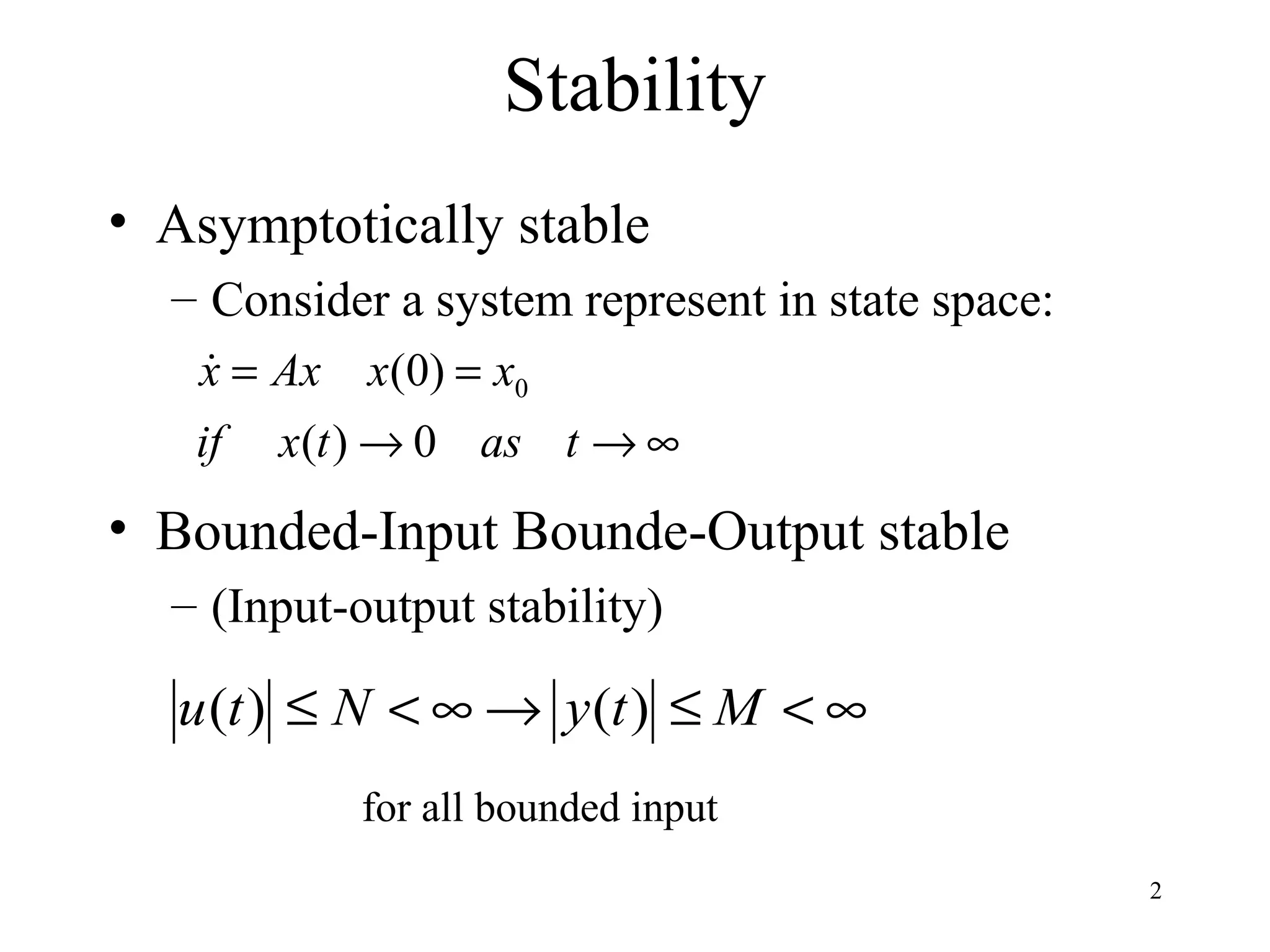
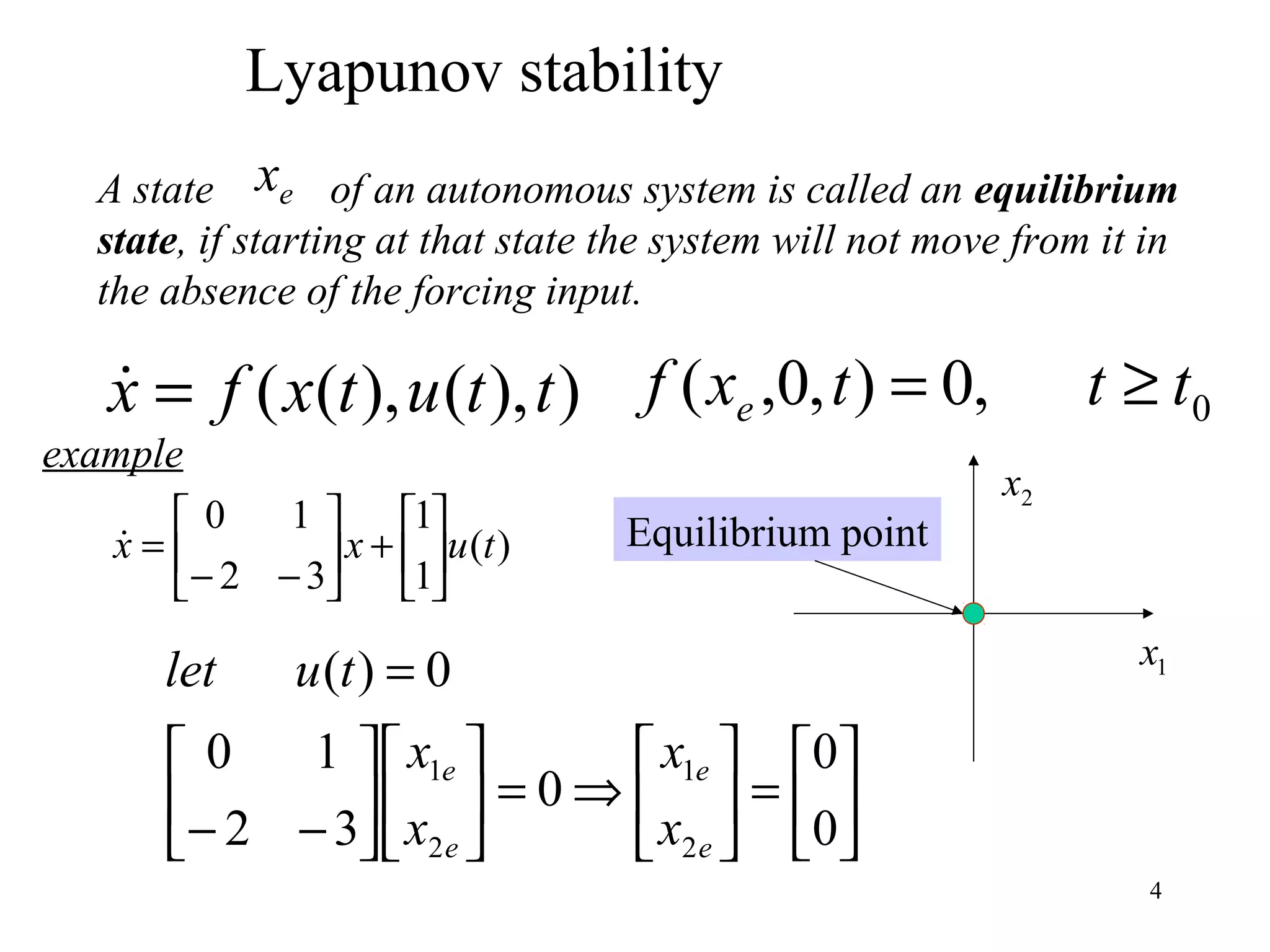
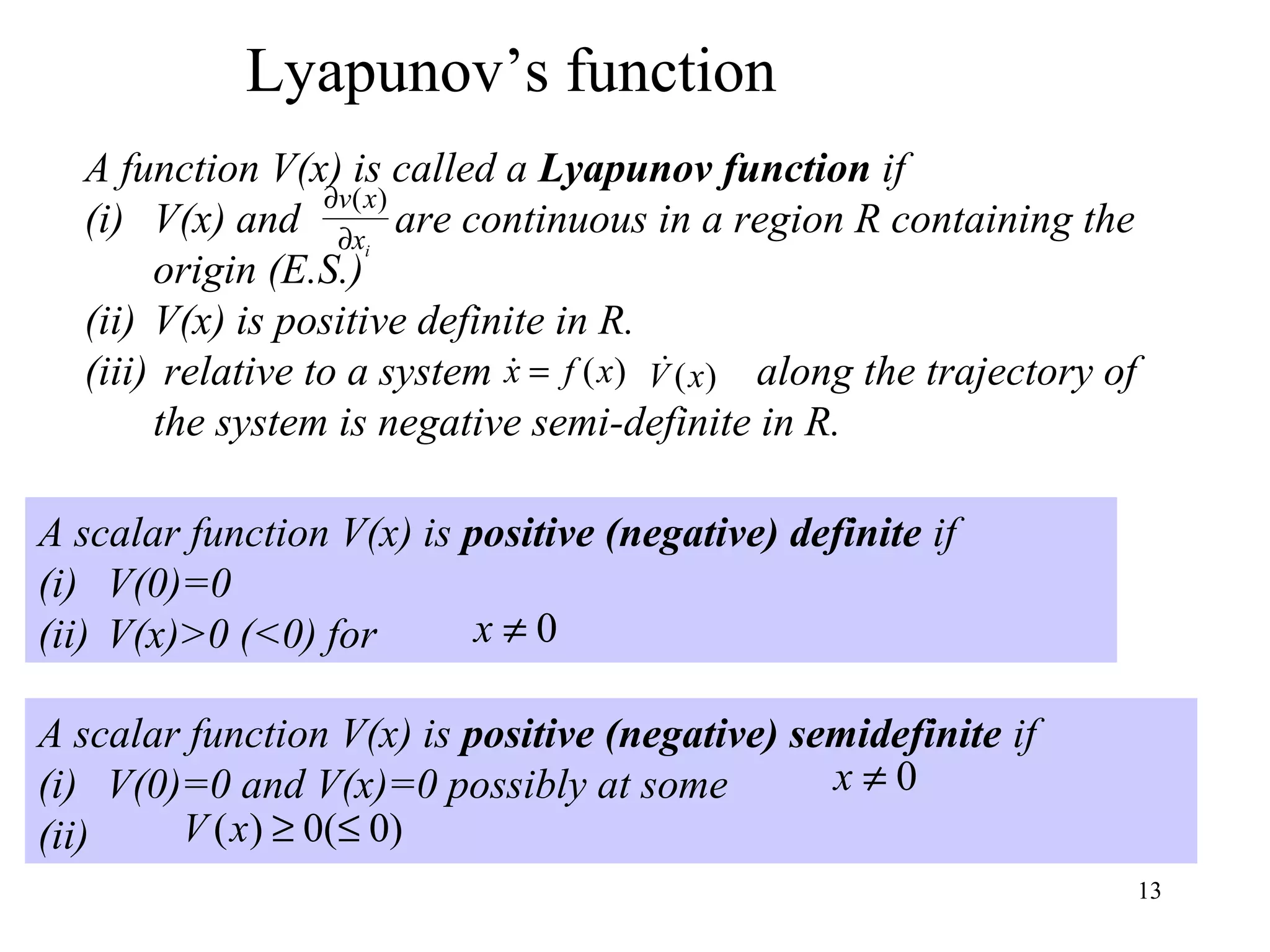
1. The document discusses Lypunov stability and different types of stability including asymptotically stable, bounded-input bounded-output stable, and Lyapunov stability. 2. It provides conditions for asymptotic stability including having all eigenvalues of the system in the left half plane and defines an equilibrium state as a state where the system will not move from in the absence of input. 3. Lyapunov's method is introduced for analyzing stability using a Lyapunov function where the derivative must be negative semi-definite to guarantee asymptotic stability.




























![Lyapunov Stability Rizki Adi Nugroho [1410501075]](https://cdn.slidesharecdn.com/ss_thumbnails/lyapunovstability-rizkiadinugroho1410501075-161123102745-thumbnail.jpg?width=640&height=640&fit=bounds)
























































